luentosuunnitelma
1. Kulissien takaa
2. Vedenpoistolaitteistojen automatisoinnin perustehtävät
3. Teolliset laitteet vesihuollon automatisointiin
4. Pumpun ohjausjärjestelmä vaihtelevalla taajuudella
5. Anturit ja erityiset vesiautomaatioreleet
7.1 Ulkomaiset raportit
Pumppu on laite, joka palvelee nesteen paineliikettä (moottorointi, pumppaus) siirretyn energian seurauksena. Pumppu muuntaa moottorin mekaanisen energian liikkuvan yksikön energiaksi, joka liikuttaa ruuvipenkkiä. Ominaisuuksiensa perusteella pumput luokitellaan seuraaviin ryhmiin:
Puhdistuslaitoksemme kerää keskimäärin noin 50 miljoonaa gallonaa jätettä päivässä ja voi saavuttaa enimmäismäärän kapasiteettia 220 miljoonaa tynnyriä tarjontaa kohden. Meillä on myös luotettava keräysjärjestelmä jätevesi ja etäasemat jätevesien hävittämiseksi.
Täällä painovoima siirtää jätevesialueen virroistaan käsittelylammikeemme, mutta syvänmeren tonttien kohdalla vaaditaan nostoasemia tai pumppausasemia kuljettamaan jätevedet suurempiin jäteputkiin. Etäohjaamme ihoviemäripumppua ja nostoasemaa normaalin toiminnan varmistamiseksi. Jos näin ei ole, hylkäämme hälytyssignaalin käsittelylaitoksen keskusvalvomossamme. Muita etävalvottavia tietoja ovat pumpun nopeus, käynnistysten ja pumpun osien lukumäärä sekä pumpun käyttötunnit.
kunnallinen ja teollinen vesihuolto;
kaatopaikat veden tai öljyn syöttämiseksi porausrei'istä;
liikkeeseen;
elämää varten;
veden valua;
öljyn ja muiden materiaalien kuljetukseen.
Pumput toimivat pääsääntöisesti trival-tiloissa , Yleensä joen arvo on useita vuosia; Käyttömoottorin akselin jännitys on normaali ilman uudelleenasentoa. Perusteellisin tapa säädellä pumppujen syöttöä on muuttaa niiden moottoreiden pyörimistaajuutta, jonka alue on pieni; Laajempaa sääntelyä tarvitaan vain ääritapauksissa.
Asensimme äskettäin uudet ohjauselementit pumppuaseman yhteen osaan. Olemme rakentaneet automaattisen hätäkytkentäjärjestelmän tälle pumppaamolle. Olemme myös äskettäin kehittäneet etätelemetriayksiköitä, jotka käyttävät ja valvovat etäjätevedenpuhdistamiemme.
Pumppuaseman ohjausyksikön modernisointi
Pumppaamoosio, jonka olemme päivittäneet automaattisella hätäkytkentäjärjestelmällä, koostuu kahdesta vakionopeuspumpusta, jotka kulkevat koko linjaa pitkin. Pumppuaseman ohjausyksikkö valvoo ja ohjaa veden virtausta säiliössä tai vesikaivossa. Säädin käynnistää ja käynnistää pumput pumpulle määritellyn tason mukaisesti. Se antaa myös korkean ja matalan tason hälytyksiä, jotka osoittavat, ovatko pumpun ohjauselementit "Manuaalinen" tai "Auto"-tilassa, ja ilmaisevat, onko ylikuormitusrele aktivoitu.
Pumppujen käyttämiseksi sekä puhaltimien yhteydessä, riippumatta ilmeisestä suuntauksesta kohti laajempaa säädettävän ohjauksen sähkökäyttöjen valikoimaa, ei-ohjattavat käytöt jätetään pääkäyttöön. Levein mahdollinen käyttö on oikosuljetulla asynkronisella moottorilla varustettu käyttö. Yli 300 kW:n kuormituksella synkroniset moottorit lakkaavat toimimasta oravahäkkimoottorin kanssa. Jos käynnistyksessä tarvitaan kiihdytys- tai käynnistyssuihkuja, käytetään asynkronisia moottoreita, joissa on kierretty roottori. Sähkökäytön säätö pysähtyy näissä tilanteissa, jos pumppauksen tuottavuutta joudutaan usein muuttamaan laajoilla alueilla, esim. vesihuoltojärjestelmien pumppujen osalta, ja myös jos pumppaus vaatii automaattista tuottavuuden säätöä siirtymällä Mahdollisesti ylös. säätöpisteeseen asti (kierto- ja käyttöpumput).
Pumppuaseman ohjausyksikkö ohjelmoi määrittämään, mikä pumppu käynnistyy ensin, jotta pumpun käyttötunnit jakautuvat tasaisesti. On myös mahdollista ohjelmoida toinen pumppu käynnistymään, koska ensimmäinen pumppu ei pysty tarjoamaan riittävästi jätevirtausta pitämään veden hyväksyttävällä alueella.
Elinkelpoisuusominaisuus mahdollistaa aseman toiminnan normaalisti, kunnes korjaukset on saatu päätökseen normaaleina työaikoina. Ihon toimintaa varten käytetään yhtä kosketinparia. Sirpaleet olisivat saattaneet olla käsissämme muutama päivä sopimuksen tekemisen jälkeen, ja voisimme kehittää näitä järjestelmiä nopeasti.
Pumppausyksiköt yhdistetään usein pumppuasemaan, jolloin useita pumppuja toimii rinnakkain yhdellä radalla.
Monet pysähtyneet pumput eivät vaadi juoksevuuden säätöä: kuivapumput, vesijohtopumput, useimmat kaivos- ja kaivosveden pumppauslaitteistot jne. Siksi ne käyttävät asynkronisia tai synkronisia (yli 300 kW:n sovelluksiin) moottoreita, joita ohjataan magneettisilla käynnistimillä.
Pumppuaseman latauksen ohjauskaavio
Aseman valvonnasta vastaava operaattori soitti minulle monta kertaa iltaisin ja viikonloppuisin ja pyysi minua katsomaan paikkaa. Prote, Internet-yhteyksien kautta havaitsemamme yhteysviiveet ovat saaneet meidät etsimään vaihtoehtoisia yhteystapoja.
Paikallinen sähkönjakelijamme toteuttaa optis-optista Internet-palvelua, jonka uskomme olevan avainasemassa tämän ongelman ratkaisemisessa. Arvioimme parhaillaan kohteita löytääksemme hyviä ehdokkaita pilottiprojektiin, jossa käytetään korkealaatuista laadukasta kumia.
7.2 Vedenpoistolaitteistojen automatisoinnin perustehtävät
Eri ATK:iden vedenpoistolaitteistojen automaatiojärjestelmien kohtaamat ongelmat ovat pääsääntöisesti samanlaisia tai lähellä päämääräyksiä. Tämän yhteydessä näytämme automaation päätehtävien kulkua kaivoksista ja kaivoksista veden pumppauksessa.
Tärkeimmät automaatiotehtävät veden pumppausprosessissa kaivoksista ovat:
Varto zusil -järjestelmän modernisointi
Uusi pumppaamoyksikkö osoittautui luotettavammaksi kuin alkuperäinen ohjausjärjestelmä. Meillä ei ole tarkkaa rekisteriä siitä, kuinka monta kertaa operatiivista henkilökuntaa on lähetetty työmaalle aiemmin tai kuinka monta kertaa sähkönsyöttö on ollut tarpeen useiden vuosien jälkeen.
Vaikka vastustimme kiivaasti, meillä ei ole vielä ollut tilannetta, joka vaatisi automaattisen kytkentätoiminnon käyttöä vian jälkeen. Koska se kruunaa meidät vain kerran, se maksaa meille paljon. Laitteisto on modulaarinen, joten meidän ei tarvitse ostaa enempää kuin tarvitsemme. Jos otat huomioon, että meillä on yli 80 etäsivustoa, säästöt voivat kasvaa nopeasti.
- vesihuoltojärjestelmän normaalin toiminnan varmistaminen ilman huoltohenkilöstön jatkuvaa läsnäoloa;
- pumppujen käynnistys ja käynnistys vedenpinnan pitämiseksi vedenkeräimessä ohjauskapasiteetin sisällä;
- pumppuyksiköiden automaattinen pumppaus;
- pumppuyksiköiden käsikäyttöinen robotti;
– automaattisesti päälle varapumppuyksiköt toimintahäiriön varalta automaattinen yhteys pratsyuvali;
Ensimmäisessä osassa kuvataan tavoitteet ja muutokset, jotka on otettava huomioon suunnittelussa. ystävä - teoreettinen perusta, Välttämätön suunnittelun ymmärtämiseksi. Näitä pumppausasemia vahvistavia asemia tarkasteltaessa on tarpeen muodostaa intranet-yhteydet, jotta työ voidaan synkronoida asemien välillä ja samalla mahdollistaa rakennuksen läpijuoksun lisääminen prosessin tehon hallinnassa.
Maantieteellisestä sijainnista johtuen monissa tilanteissa tämän kysynnän tyydyttämiseksi on käytettävä pumppuasennuksia. Tässä vaiheessa elektroniikkainsinöörit voivat puuttua asiaan optimoidakseen tämän prosessin. Tämän robotin sisältämä rakenne voidaan koota minkä tahansa tyyppiseen pumppuyksikköön, ei vain juomaveteen, vaan se voidaan myös sovittaa erilaisiin pumppuasemiin. Tätä sopeutumiskykyä rajoittaa vain kolmivaihemoottorin tiiviys. Tietyntyyppisissä galusissa seurantajärjestelmä voi tarjota merkittäviä säästöjä tunneissa ja optimoida prosessia.
- erilaisten täyttömenetelmien pysähtymisen mahdollisuus: säiliöakut; pysähtymisestä öljypohjapumput tai takakammiot; poistoputkesta; lisäpumppu- ja sifonimenetelmällä;
- täytön annostelu tunnissa;
- vaihtaminen automaattiohjauksesta käsiohjaukseen.
Lisäksi veden pumppausprosessin automaatiojärjestelmän on varmistettava:
Voit lyhentää tuntimäärää, jonka käyttäjä tarvitsee prosessin valvontaan, itse asiassa riittäisi koneen tarkistaminen pumppuasemat hautaustoimistossa dovkilla ja vain operaattorin tai apulaisen äiti. Voit taata, että säiliöissä on vettä tulevaisuudessa.
On selvää, että nämä toiminnot on katettava, niin monimutkainen ja yksinkertainen kuin järjestelmä voi olla, koska sen määrää ohjattavan järjestelmän tyyppi ja tallennuskomponentit, kuten kytkimet, releet ja kelloohjaimet. Ohjaa erilaisia toimintoja, kuten käynnistystä, kiihdytystä, nopeuden säätöä, jännityksen hallintaa, vapautusta, käännöstä ja viivettä. Tämä johtuu manuaalisesta ohjauksesta, joten käyttäjän on liikutettava kytkintä tai painettava painiketta, jotta kaikki muutokset tapahtuvat koneen tai järjestelmän työmielessä.
- lähellä olevien yksiköiden paikallinen (manuaalinen) ohjaus hionta- ja korjausrobotteja varten;
- minkä tahansa pumppuyksiköiden määrän paikallinen ohjaus häiritsemättä muiden yksiköiden toimintaa automaattitilassa;
- vialliset pumput, joiden tuottavuus on heikentynyt tai menetetty, laakerien ylikuumeneminen, alhainen jännite ohjausköysissä, oikosulut;
Kuvassa 1 on esitetty, kuinka tämäntyyppinen ohjaus toimii niin, että kuljettaja sijaitsee siellä, missä käynnistin sijaitsee, jotta moottoria voidaan säätää. Malyunok 1 Manuaalisesti ohjattava sähkömoottori. Pienessä kuvassa 2 on automaattiohjaus, jossa painikkeiden käyttäjä sijaitsee juuri siellä, missä painikkeet sijaitsevat.
Pieni 2 Sähkömoottorin automaattinen ohjaus. Alkukäsittely on automaattinen, mutta saatat joutua luottamaan painikepaneelin tai kytkimien manuaaliseen käyttöön. Siten, jos järjestelmä sisältää yhden tai useita automaattisia laitteita, se luokitellaan sitten automaattilaitteeksi. Tämä ohjausjärjestelmä aktivoi painikkeet oikealla hetkellä ja piiri sulkeutuu automaattisesti; Niin kauan kuin lansetti on kiinni, se antaa sähkömagneettisen käynnistimen aloittaa työnsä ja käynnistää moottorin.
- esto, joka sisältää mahdollisuuden: käynnistää pumppuyksikön, kun pumppua ei ole tulvinut, käynnistää pumppausmoottorin käyttö ennen pumppuyksikön käynnistämistä, pysäyttää pumppuyksikön, kunnes pumppaus on täysin suljettu, käynnistää pumppuja etänä, kun ei ole vettä vedenkerääjässä, hätäkäynnistys uudelleen Kytke pumppu, kunnes hätäpysäytyssyy on selvitetty ;
Vedenpoistolaitteistojen automatisoinnin perustehtävät
Malyunok 3 Sähkömoottorin automaattinen ohjaus. Tämä tarkoittaa loogisen ohjaimen, suuren mittakaavan ohjelmointia, joka on suunniteltu ohjaamaan viimeisimpiä reaaliaikaisia prosesseja, jonka ohjaukseen ja ohjelmointiin pääsee käsiksi henkilökunnan sähköisellä tai elektronisella valvonnalla ilman tietokoneen tietämystä. Sitä voidaan pitää myös mustana laatikkona, joka sisältää tuloliittimet, joihin on kytketty painikkeet, ilmaisimet ja lähtöliittimet, joihin on kytketty kontaktorin kela, sähköventtiili, lamppu jne. Siten robotti pysyy tulosignaalien läsnä ollessa, jotka aktivoituvat joka hetki, aina kun ohjelma tallennetaan.
- pumpun tuottavuuden, laakerien ylikuumenemisen ja kuormien asennon hallinta;
- hydraulinen suojaus, suoja laakereiden ylikuumenemiselta ja muun tyyppinen suoja;
- hälytys: vedensyöttökammiossa - pumppausyksikön hätäpysäytys ja jännitteen olemassaolo ohjauslansseissa; kaivoksen keskusohjauspisteessä - pumppausyksiköiden toiminnasta (svitlov), pumppuyksiköiden hätäpysäytyksistä (vikainen signaali), veden hätävirtauksesta vedenkeräimeen, signaalilankojen (ääni ja valo) toimintahäiriöstä ja noin tapahtumat Ohjausnastoissa on jännite.
Perinteiset elementit lisäreleillä, estolla, ajastuksella jne. - sisäinen. Itse asiassa ohjaimen tehtävä on ohjelmien yhdistäminen, joka muodostaa vuorovaikutuksen tulosignaalien välille, jotka on kytkettävä, jotta vastaavien ohjelmien lähtö voidaan aktivoida.
Ohjelmien muuttaminen ja korjaukset. Perinteisessä langallisessa piirissä kaikki muutokset vievät paljon aikaa, joten tämän muutoksen tekeminen edellyttää ohjauskorttien uudelleenkäsittelyä. Alhaiset kustannukset Teknologinen kehitys on johtanut toimintojen lisääntymiseen pienissä ja yhä halvemmissa yksiköissä. Työnopeus. Perinteiset viestit voivat kestää melkoisen tunnin. Luotettavuus Yleensä puolijohdelaitteet ovat luotettavampia kuin sähkömekaaniset releet ja ajastimet.
Riippumatta vesihuollon teknisistä järjestelmistä asuntola vedenpoistolaitteistojen automatisointi:
- huoltohenkilöstön valvonta;
- hydraulityön luotettavuuden ja turvallisuuden lisääminen;
- varmistaa pumppujen optimaaliset toimintatilat niiden tuottavuuden säätelemiseksi.
Ohjauksen ja taloudellisen tehokkuuden kannalta SRSR:n vedenpoistolaitosten automatisointiprosessi kehittyi kahdessa vaiheessa:
Luo kuva tietueista, koska koristuvach-ohjelmalla ei ole velvollisuutta päästä välittömästi käsiksi näihin tietueisiin. Tulosteiden päivitetty tila on yhdenmukainen niiden kuvien kanssa, jotka on otettu wiki-ohjelman syklin lopussa. On olemassa kahdenlaisia tuloja: digitaalitulot, analogiset tulot, digitaaliset tulot.
Tämä uudelleenluominen riippuu kappaleen tarkkuudesta ja luvasta ja jokaisesta tunnin kappalevälistä. Analogiset tulomoduulit voivat lukea jännitettä tai merkkijonoa. Lähtöjä on kahdenlaisia: digitaaliset lähdöt. Staattiset lähtömoduulit, kun ne toimitetaan jännitteellä, voivat toimia vain elementeissä, jotka toimivat samalla jännitteellä, ja sähkömekaaniset lähtömoduulit, joilla on eri jännite, voivat toimia elementeissä, jotka toimivat samalla jännitteellä. toimivat vaihtelevilla jännitteillä. Tämä jännite tai teholähde voi toimia ohjauskomponenttina mekaanisille mekanismeille, jotka vastaanottavat analogista ohjausta, esimerkiksi juoksevuusvariaattorit, uunityristoriohjaimet ja lämpötilansäätimet.
ensimmäinen vaihe - pumppujen käynnistys- ja käynnistysprosessin automatisointi vedenkeräimen vedenpinnan funktiona;
Toinen vaihe on automaattinen pumppaus, joka varmistaa veden pumppauslaitteiston optimaaliset toimintatilat.
Automaation ensimmäisen vaiheen taloudellisesta tehokkuudesta huolehtii omistautunut huoltohenkilöstö. Toisessa automaation vaiheessa tehokkuus saavutetaan:
Analogiset signaalit käyvät läpi suuren mukautumisprosessin sekä tulo- että lähtömoduuleissa. Lohko tai ohjelmointikonsoli: se valitsee laitteet, laitteistot ja ohjelmistot, joiden kautta ohjelmat syötetään, ja määrittää ohjesarjan, joka muodostaa pakatun ohjelman. Tällä tavalla he eivät ole suoraan mukana ohjelman valmistelussa tai toteuttamisessa.
Katso ohjelmasta lisätietoja, jotka tallennetaan syöttökuvaan ja luotaessa tulostuskuvia. Sen rakenne on samanlainen kuin langallisella logiikalla varustettuihin ohjaussilmukoihin perustuva, joten se perustuu samaan normaalisti auki olevien ja normaalisti suljettujen koskettimien havaitsemiseen, samalla erolla kuin sen Tulkinta on täysin erilainen. Baby 6 näyttää ohjelmoinnin kontaktien mukaan.
a) yksinkertaistetut hydrauliset ja sähköiset vesihuoltopiirit, jotta tulvimisjärjestelmiä ja taittolaitteita ei tarvitse ohjelmoida;
b) vedenkeräinten kapasiteetin vähentäminen 30-50 %;
c) sähkömoottoreiden voiman ja pumppujen tuottavuuden lyhentäminen 35-75 %;
d) veden pumppauslaitteistojen luotettavuuden lisääntyminen, on selvää, että noin 80 % kaikista ongelmista ilmenee pumppujen käyttöönottohetkellä;
e) pumppujen muutosten kustannusten vähentäminen teollisuuspumppujen työskentelyalueen lisäämiseksi.
Neuvostoliitossa suurin kunnioitus annettiin automaation ensimmäiselle vaiheelle. On selvää, että ennen ensimmäistä automaatiovaihetta ohjauslaitteiston on tarjottava kolmen tyyppistä ohjausta: automaattinen, paikallinen (vesikammiossa) ja etäohjaus (lähettäjältä).
On tärkeää huomata, että tulevaisuudessa vesipumppujen automatisoinnin toisella osa-alueella (useimmiten ulkomailla laajalle levinneellä) on kohua, koska laite perustuu yhteen pumppuun, jossa on vaihtuvataajuinen asynkroninen sähkökäyttö. Tässä tapauksessa moottorin jännitys valitaan suurimman mahdollisen virtausnopeuden laajennuksesta, jotta taataan suurin mahdollinen käyttöpaine. Siten keski- ja matalaveden vuorovedellä vältetään selkeä moottoritehon puute, joka kuitenkin kompensoituu sen nestetehoa muuttamalla ja sen seurauksena jännitteen ja syöttöveden muutoksilla.
7.3 Teolliset laitteet vesihuollon automatisointiin
Vedenpoistolaitteistojen automaattiseen ohjaukseen on saatavilla seuraavat laitteet:
AVO-3 asennuksiin, jotka on varustettu yhdellä pumpulla, jossa on oravakehäinen asynkroninen moottori 120 kW asti;
UAV asennuksiin, joissa on korkea- ja matalajännitteiset asynkroniset oikosulkusähkömoottorit. UAV-laitteet on yhtenäistetty ja normaalisti asennettu ja voidaan varustaa pumppujen automatisoimiseksi;
VAV asennuksiin, jotka on varustettu pumpuilla (enintään yhdeksän) korkea- ja pienjänniteasynkronisilla oikosulkusähkömoottoreilla. Laitteet ovat tärinäsuojattuja, ja niitä voidaan käyttää kaivoksissa, jotka eivät ole turvallisia kaasulle tai sahoille.
Ennen tärkeimpiä vesipumppulaitteiston ohjauksen toimenpiteitä pumppu tulee esitellä ennen sen käynnistämistä. Tänä suurimman laajenemisen aikana on käytettävissä menetelmä täyttöpumpun täyttämiseksi täyttöpumpulla, joka sijaitsee vedenkerääjässä alemman tason alapuolella ja on jatkuvasti täynnä vettä.
Automaattisen vedenpoistolaitteiston hydraulikaavio esitetään pienelle 7.1.
Malyunok 7.1. Automaattisen vedenpoistojärjestelmän hydraulikaavio
Tässä ovat kuvat: 1 - tasoanturit; 2 - ohjauslaite (tasonsäätörele); 3 - mekaaninen asennusmekanismi sähköisellä käyttölaitteella; 4 - vedenpoistoputki takaiskuventtiilillä; 5 - anturi-rele ruuvipenkki; 6 - lämpötila-anturit; 7 - tuottavuusanturi-rele; 8 - upotettava täyttöpumppu.
VAV-laitteet tarjoaa pumppuyksiköiden automaattisen, kauko- ja manuaalisen ohjauksen.
Automaattitilassa laite käynnistää pumppausyksiköt pitäen samalla vedenpinnan vesisäiliössä; varmistaa, että pumppujen sähkömoottorit kytketään päälle pumppausyksiköiden rinnakkaisen käytön aikana käynnistyssuihkujen ja hydraulisen iskun poistamiseksi; käynnistää varapumpun, kun työntekijä lähtee tuskasta; Täyttää pääpumput pää- tai apupumpulla ja ohjaa täyttöä tunneittain, valvoo työn tuottavuutta ja suojausta hätätiloista.
Katsotaanpa robotin VAV-piiriä automaattitilassa. Osoitti kuvaan. 7.2 periaatteet Yhden pumpun automatisoinnin sähköpiiri vastaa teholaitosta.
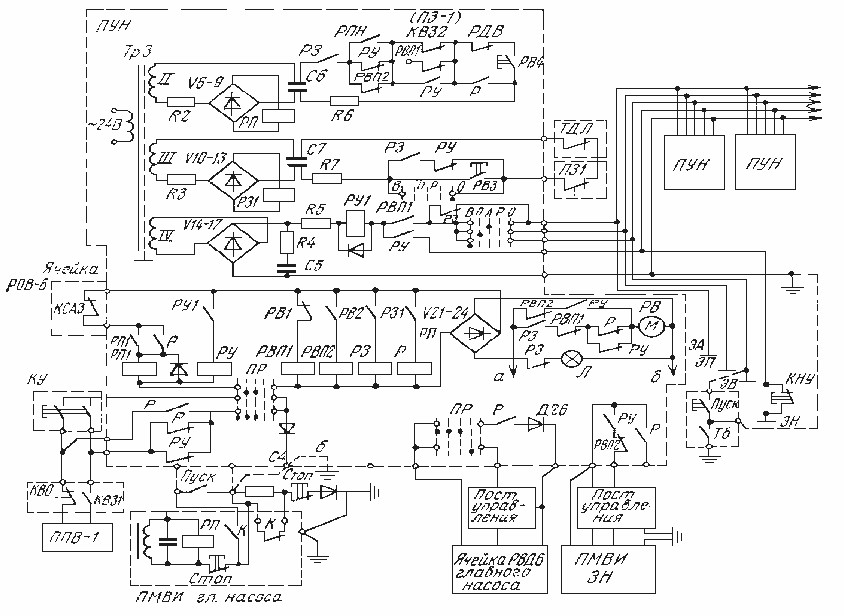
Malyunok 7.2. VAV-laitteiden sähkökaavio
PR:n asentokytkin on ylätason pumpun (B) käyttöasennossa. kun ohjausyksikköön syötetään jännite, merkkivalo ja erityinen suojarele RZ1 syttyvät piirissä: muuntajan TP3 käämi III, kondensaattori C7, lämpötila-anturin TDL kosketin, liitinkytkin PZ1, toimilaite robottimoodi PR, vastus R7, kondensaattori C7, diodi Mist D10 -D13, vastus R3, käämi III TP3. Rele P31 kytkee sulkukoskettimellaan päälle suojareleen RZ, joka on valmis ennen kuin lansettikytkin käynnistää imu- ja pääpumput.
Kun ylätason anturi EB joutuu kosketuksiin veden kanssa, välireleen RU1 piiri sulkeutuu ja sitä käytetään (käämi IV TP3, D14, D17, R5, RU1, RVP1, PR, EB, vesi-maa, käämi IV TP3 ). Rele RU1 kytkee kytkentäkoskettimellaan päälle ohjausreleen RU (tulo b, D21-D24, RU1, RU, PR, liitäntä a), koska kytkentäkoskettimellaan RU ja elektrodilla EN ohittaa releen RU1 koskettimen, kunnes vesi on vedenkeräin putoaa elektroditason EH alapuolelle.
Sulkeutuvalla koskettimella varustettu RU-rele käynnistää täyttöpumpun käynnistimen (pääpumpun esitäyttö alkaa) ja moottorin releen moottorin M, ja täyttöohjelma käynnistyy ja käynnistää pääpumpun.
Oikeaan aikaan releen RV4 kosketin sulkeutuu ja rele RP kytkeytyy päälle (käämi II TP3, C6, R3-RVP2, RU, RDV, RV4, R6, C6, D6-D9-R2, käämi II Tr 3 ), kun sen sulkeutuva kosketin käynnistää pääpumpun R relekäynnistyksen. Jäljellä oleva kosketin kytkee käynnistimen PPV1 avauskäyttöä varten ja keskimmäisen RVD6:n (suurjännitemoottorina) tai käynnistimen (pienjännitteisenä). pääpumpun moottori).
383 sekunnin kuluttua (pääpumpun käyttötunti) RV2-releen kosketin sulkeutuu ja RVP2-rele kytkeytyy päälle, mikä avaa RV-moottorireleen ja RP-releen jännitteiset moottorilangat. Moottori M tärisee ja rele RVP2 on tässä shunttisarjassa käämikytkimen releen kosketuksella.
Kun vettä on pumpattu alemmalle tasolle, releen RU1 virransyöttöpiiri avautuu, mikä kytkeytyy päälle ja avaa RU-releen käyttöpiirin. Tällä käytetään latausasemaa, kunnes PPV1-käynnistin kytketään päälle, ja se sulkeutuu.
Kun lukko suljetaan, kosketin KVZ2 avautuu ja RP-rele kytkeytyy pois päältä. Pääpumpun moottori on päällä maltillisesti. Kun käynnistin on täysin suljettu, PPV1-käynnistin kytketään päälle pääteasentokoskettimesta KVZ1.
RU-rele koskettimineen kytkee moottorin M päälle ja moottorin rele RV käännetään aloitusasentoon, johon moottori M kytkeytyy koskettimen RVP1 seurauksena.
7.4 Tyypillisten robottialgoritmien analyysi
Samoin kuin kaivoksen vedenpumppulaitteistojen toiminnan vakioalgoritmi, jota voidaan laajentaa Radyansky-tuotannon sarjalaitteisiin, vesipumppujärjestelmän toiminta on nykyisen tilauksen alaista.
Kun robotin laitteet ja ohjelmistot on kytketty päälle, veden virtausta vedenkerääjässä seurataan elektrodiantureilla (loogisemmin R). Jos vesi nousee ylätason anturiin, vastaanotetaan komento käynnistää täyttöpumppu ZPN, joka toimittaa vettä pumppuun tunnin ajan ohjelmistoyksikön välittämänä. Täyttöintensiteettiä ohjaa RDV-vararele (loogisemmin k). Viinien tason valvontahetkellä edistynyt tai hätätaso on saavuttanut ( R= 0), ohjelmistolohko kytkee piirin välittömästi päälle n pumppaa kerralla ja käynnistää sitten esitäyttöpumpun.
Jos pumppu (tai pumput) tulvii, annetaan komento viedä se robottiin ja ohjata tuottavuutta edelleen tuottavuusreleen RPN osuuden lisäksi (loogisemmin r).
Heti kun pumppu lisää määritettyä tuottavuutta (r = 1), piiri kytkeytyy ohjaamaan alempaa tasoa, kun se saavuttaa minkä tahansa päälle kytketyn pumpun.
Jos pumppu ei jostain syystä ole kehittänyt määritettyä tuottavuutta, se sammutetaan ja lähetetään signaali lähettäjälle, ja laite aloittaa uuden syklin käynnistämällä vetopumpun.
Ohjausalgoritmi kuvastaa vain järjestystä, jossa pumppujen käynnistyksen ja sammutuksen päätoiminnot tunnistetaan. Niiden lisäksi automaatiolaitteisto varmistaa erilaisten ohjaus- ja aputoimintojen kytkennän, esimerkiksi laakerien lämpötilan valvonnan lisä-TDL-antureilla.
Siten kaivoksen vesihuoltotyypin tärkeimmät automaatiolaitteet ovat AT, VAV, KAV, UAV jne. Se käyttää vain kaksiasentoista pumppausperiaatetta pumppuyksiköillä, mikä varmistaa pumppauskompleksien tuottavuuden muutoksen muuttamatta toimivien pumppujen määrää.
Vedenpumppulaitteistojen toiminnan tehokkuutta voidaan parantaa edelleen luomalla järjestelmiä, jotka varmistavat pumppujen tuottavuuden säädön algoritmin mukaisesti tai siirtämällä ne jatkuvaan veden pumppaamiseen (toiminta "vuorovedellä").
Tästä syystä:
Vedenkeräinten vaadittu kapasiteetti pienenee 30-50 %;
Pumppuyksiköiden sähkömoottoreiden jännitys vähenee 35-75% ja on mahdollista pysähtyä vähemmän kuin pumpun tuottavuus;
Robottiveden pumppauslaitteistosta tulee yhä epävarmempi, sillä noin 60 % pumpuista menee vikaan, kun pumput käynnistyvät;
Vesihuollon kustannukset muuttuvat tehovesipumppauksessa vähimmäisenergiankulutuksen vuonna, jos sähkön tariffi on minimaalinen.
Alakeskipumppujen tuottavuuden automaattinen säätö voidaan saavuttaa muuttamalla juoksupyörän kehän juoksevuutta tai muuttamatta sitä.
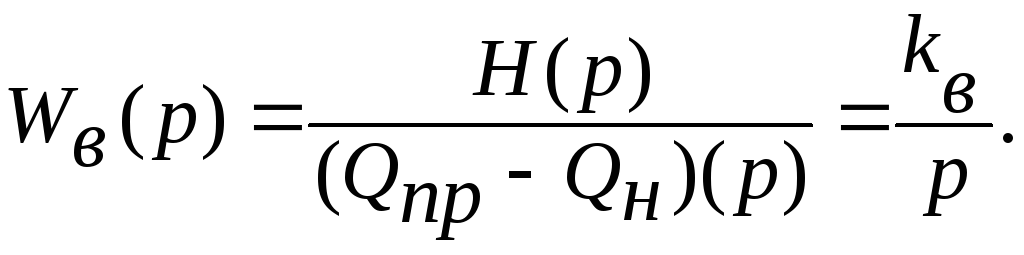
Vesipumppulaitteiston ACS:n säätökohteena on vedenkeräin B ja sen lähtöparametri on vedenkorkeus N, jota on tuettava pumpun tuottavuuden Q jatkuvalla muutoksella. Tasainen sisäänvirtaus tässä järjestelmässä on veden sisäänvirtaus Q jne. Tällaisen kohteen differentiaalinen taso

de dH / dt - vesisäiliön vedenpinnan muutoksen nopeus, m / s;
Q pr - vuorovesi, m 3 / s;
k in = 1 / F - kohteen siirtokerroin (F - valuma-ala, m 2);
Q n - pumpun tuottavuus, m 3 / s.
No, objekti on ensimmäisen asteen astaattinen linkki, joka välittää sen toiminnan
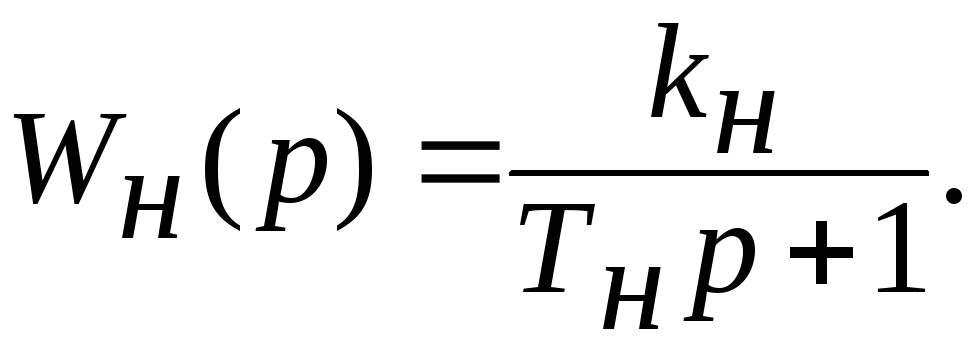
Pumpulle on tunnusomaista juoksupyörän tasaisuus sisääntulossa ja tuottavuus Qn ulostulossa. Siellä voi olla esityksiä jaksottaisella ensimmäisen kertaluvun lankalla, jossa on siirtofunktio
Pumpun siipipyörän maksiminopeutta voidaan muuttaa muuttamalla pumpun sähkömoottoria syöttävän jännitteen taajuutta f.
ACS:n taajuudensäätö käsittää tässä tapauksessa TFC:n tyristoritaajuusmuuttajan, jonka ohjaussignaali syötetään BU-ohjausyksikköön. Kaukosäätimen tasoanturi suorittaa kohteen N lähtöparametrin muuttamisen. Haittasignaalin U merkki ja yhtä suuri kuin todellisen U f:n ja annettujen U 3 -arvojen välillä osoittaa CU-ohjausyksikölle tulevan lähtösignaalin luonteen. Signaalit U f і U 3 ovat identtisesti verrannollisia H 3 i N f. Keskeytymättömän signaalin U f sieppaamiseen käytetään induktiivisia ja reostaattisia antureita, joissa on kelluva herkkä elementti, sekä muun tyyppisiä taajuuskorjaimia.
Viime vuosina Georgian teollisuudessa on myös ilmaantunut laajennettu menetelmä pumpun tuottavuuden säätämiseksi juoksupyörän tasaisella pyörimistaajuudella sisääntulossa ja imussa. Tälle menetelmälle on ominaista yksinkertaisuus ja se on melko taloudellinen.
Itsesäätelytila johtuu siitä, että paine on tarkka A(Piste, jossa tyhjennysputki tuodaan pumpun märkäputkeen) määräytyy hydrostaattisella paineella Pa, joka on verrannollinen vedenkeräimen veden tasoon ja osien a-b paineeseen.
Jos tällaisella vakiopaineella kostutetussa putkistossa on enemmän häviöitä etäisyydellä a - b, sitten (P a - P at) 0, niin paluuta pumppuun ei ole ja sen tuottavuus on maksimi. Kun (P a - P at) 0, pumpussa on paljon vettä ja sen tuottavuus laskee.
ACS:n hydraulinen kaavio pumpun tuottavuudelle syöttämällä vettä imuputkeen itsesäätötilassa on esitetty kuvassa 7.3, a.
Säätökohteena ACS:ssä, syötettäessä ilmaa imuon, voi olla myös vedenkeräin B (Kuva 7.3, b).

Malyunok 7.3. ACS-pumpun tuottavuuden, imusyötön hydrauliset (a) ja toiminnalliset (b) kaaviot
Pumppu - putkilinja -linjan differentiaalinen kohdistus (N kanssa - pumppu)
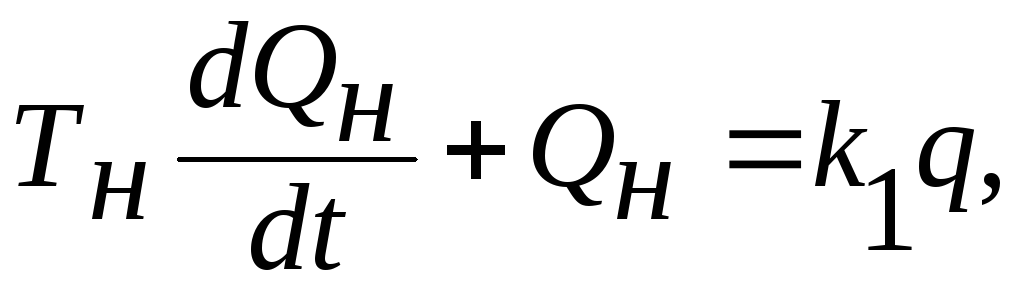
de T n - Lankan tunnin mukainen;
q on tuulijätteen tilavuus.
Myös "pumppu - putkisto" -linkki on ensimmäisen kertaluokan jaksollinen linkki, joka välittää minkä tahansa toiminnon

Lankan linjaa "syöttää putkea" kuvaa inertiaton, tehostettu lyhty:
Pumppuyksiköiden tuottavuuden säätelemiseksi automaattisesti voidaan toteuttaa erilaisia ohjausalgoritmeja: ylläpitää tasaista veden tasoa vedenkerääjässä; vedenpinnan muuttaminen tietyn ohjelman mukaan; kaivoksen sähköaseman renkaiden paineen tarkistus.
Samalla on tärkeämpää säädellä lisätaajuusmuuttimia, joiden avulla voit muuttaa sujuvasti pumpun sähkömoottorin pyörimistaajuutta ja tällä tavalla säädellä sen tuottavuutta ja tukea virtausnopeutta eri vuorovedissä.
Kun paine on alhainen, pumpun moottori pyörii alhaisella juoksevuudella, joka riittää pitämään alhaisena vesimäärän vesisäiliössä (kaivossa) ja kuluttaa mahdollisimman vähän energiaa. Kun vesivirtaus saavuttaa huippuarvonsa, moottorin juoksevuus ja sen seurauksena tuottavuus paranevat.
7.5 Pumpun ohjausjärjestelmä vaihtelevalla taajuudella
Tärkein asia, kuten aiemmin todettiin, on lisätaajuusmuuttajien säätö, jonka avulla voit muuttaa sujuvasti pumpun sähkömoottorin pyörimistaajuutta ja tällä tavalla säädellä sen tuottavuutta ja ylläpitää virtausta veteen irnik joen eri sivujokien kanssa. Pienillä sisäänvirtauksilla pumpun moottori pyörii alhaisella juoksevuudella, mikä on tarpeen vain vähimmäistason (alemman) ylläpitämiseksi ja kuluttaa vähintään energiaa.
Pienessä kuvassa 7.4 on toimintakaavio yrityksen FR-A500 taajuusmuuttimilla varustetun pumpun sähkömoottorin säätämisestä Mitsubishi Sähköinen.
![]()
Malyunok 7.4. Vaihtuvataajuisen pumpun sähkömoottorin säätelyn toimintakaavio
Järjestelmätuloon syötetään komentosignaali ja signaali, joka otetaan tasoanturista. Tason todellisen ja asetettujen arvojen välinen ero muunnetaan säätimellä taajuuden asetussignaaliksi, ja ruiskuttaessa se muuttaa pumpun moottorin pyörimistaajuutta yrittäen tehdä eron asetettujen ja todellisten arvojen välillä. tasosta nollaan. Tällä tavalla vesisäiliössä oleva veden vähimmäismäärä säilyy nousevasta vuorovedestä riippumatta.
Nykyisten taajuusmuutosten avulla voit luoda minkä tahansa monimutkaisia ohjausjärjestelmiä ilman lisälaitteita - ohjelmallisesti ohjelmoidun teollisuusohjaimen avulla.
Tässä tapauksessa on myös mahdollista käyttää vesipumpun itsekulkevan ohjausjärjestelmän robottialgoritmia sumean logiikan sääntöihin perustuen.
Hyvä työsi on helppo lisätä tietokantaan. Vikorista muoto, varjostaa sitä alemmas
Opiskelijat, jatko-opiskelijat, nuoret, jotka tuovat tietopohjaa ammattiinsa ja työhönsä, ovat sinulle vieläkin erityisempiä.
Lähetetty http://www.allbest.ru/
Moskovan alueen valaistusministeriö
Valtion budjettivalaistuksen asennus
Keskiasteen ammatillinen koulutus
Moskovan alue
"Klin Industrial and Economic Technical College"
Tiivistelmä aiheesta:
"Pumppausasemien automaattinen ohjaus"
Vikonav
opiskelija gr. TM-11
ON. Karelin
Pumppausasemien tarkoitus ja toimintaperiaate
Vesipumppuasema on pääosa mökin tai mökkien vesijärjestelmästä siinä muodossa, että se erottaa ne autonomisista vesipumpuista glybinnyh sverdlovins. Useissa aalloissa yksiköt myös vikoroituvat pumpattaessa vettä vesijohtolinjat, Jos siinä ei ole tarpeeksi painetta, ja myös tarvittaessa, varastosäiliöissä on syöttöä. Kodin ja mökin pumppuasemat selviävät helposti pohjaveden noususta ja tulosta ja voivat tarvittaessa pumpata vettä pumppuasemalle. Kaikki toiminnot sekä niiden hallinta, mukaan lukien järjestelmän turvallinen käyttö, hydraulisten iskujen vähentäminen jne., suoritetaan täysin automaattisessa (tai puoliautomaattisessa) tilassa. Kun kyseessä ovat haudatut porausjärjestelmät, pinnalla on automaattinen pumppuasema. Se on pumppu, joka on yhdistetty monoblokkiin, jossa on relepumppu ja hydraulinen akku. Vesi virtaa paineen alaisena, ja jos jäljellä oleva vesi putoaa tiettyyn kynnykseen, rele käynnistää pumpun automaattisesti toistaakseen syklin. Ennen kuin ostat pumppausaseman, kiinnitä erityistä huomiota hydraulisen varaajan valintaan. Tämän velvoitteen on oltava optimaalinen, koska vain tässä tapauksessa taataan koko järjestelmän luotettava toiminta kokonaisuudessaan. Tähän luokkaan kuuluvat jäteveden pumppaamot, joihin kuuluu myös erityinen säiliö kiintoaineiden keräämiseen. Vielä tehokkaampaa on leikkausmekanismilla varustetun erityisen pumpun käyttö, jota käytetään suurten osien ja kuitujen leikkaamiseen.
Zagalnye Vidomosti. Sähkökäyttöisten pumppuyksiköiden käyttö. Nykyisissä kotimaisissa ja ulkomaisissa järjestelmissä robottipumppuyksiköiden ohjaustilat toimivat automatisoidulla ohjatulla sähkökäytöllä. Tällaisissa järjestelmissä säädelty parametri on säteen paine. Nykyinen teknologian kehitys mahdollistaa painetehtävien suorittamisen erittäin tarkasti. Työntövoiman suurta tarkkuutta seuraa kuitenkin jatkuva muutos pumppuyksikön sähkömoottorin taajuudessa ja sen seurauksena pumppuyksikön elementtien ympärillä on ainutlaatuinen merkki merkityksestä (joustavat liittimet, jotka yhdistävät pumppu vigunom i in.), joka suoritetaan ennen niiden välitöntä poistamista. Siksi useissa tilanteissa on tarpeen asentaa ohjausjärjestelmän siirretty epäherkkyysvyöhyke, mikä vähentää paineen stabiloinnin tarkkuutta.
Kuumavesijärjestelmän pumppuyksikön säädetyn sähkökäytön ikeessä siirretään yhden tyyppisen sähkökäytön voittovoima, mukaan lukien: induktorikytkimet (IMC), joissa on herätekäytöt tyristoriyksiköistä BU-3509 ja muut, kuten niitä; PChT-sarjan taajuusmuuttajat, PChR-2 SAMI (Stromberg-yhtiö) ja muut tyypit; AVK-piirin takana olevat sähkökäytöt, jotka perustuvat TDP-2-muuntimiin ja ShDU-ohjausasemiin; sähkökäyttöiset venttiilisähkömoottorit, joissa on käännettävät venttiilit PCVN, PCVS.
Paineen stabiloituminen johtuu siitä, että vedenoton muuttuessa paine kasvaa ja pumpun sähkömoottorin pyörimistaajuus muuttuu ohjausjärjestelmän seurauksena. Vedensyötön lisääntyessä ytimen paine kuitenkin laskee ja kääreen tiheys kasvaa. Pääjärjestelmä paineen tasaamiseksi putkistojärjestelmässä on ylläpitää paine paineasetuksessa.
Paineenvakautusjärjestelmissä on tarpeen kytkeä päälle lisää ei-säätelypumppuja, kun virtaus tai vedensyöttö kasvaa, ja sammuttaa ne, kun ne muuttuvat.
Suurimmat pumppuyksiköt, joilla on suurin tasainen ominaisuus, on varustettu säädettävällä käyttölaitteella. Jos samantyyppisiä pumppuja vaihdetaan, ei-säädettävien pumppujen työpyörät ovat halkaisijaltaan pienempiä kuin säädetyt, kuolleiden vyöhykkeiden muodostumisen välttämiseksi. Säädetyn pumpun eri halkaisijajakaumissa ja roboteissa maksimivirtaustilassa suurella taajuudella pyöriminen (riippuen sähkökäytön taajuudesta) johtuu siitä, että moottori on varustettu korkeapainetyypillä. Siinä kaikki, mitä suosituksessa on.
Ilmeisistä eduista huolimatta sähkökäyttöinen säätö ei ole vielä saanut laajaa valikoimaa pumppuyksiköissä. Tällä hetkellä heidän mielensä vetäytyivät yhteen saavuttaakseen suurempaa elinvoimaa. Voimansiirtotekniikan nopea kehitys on mahdollistanut luotettavien ja edullisien staattisiin muuntimiin perustuvien ohjaussähkökäyttöjen luomisen. Lisäksi valoenergiakriisi osoitti selvästi energiavarojen todellisen arvon ja kannusti niiden järkevään käyttöön. Tämän seurauksena automatisoidulla ohjaussähkökäytöllä varustettujen pumppuyksiköiden tutkimus, kehitys ja luominen ovat laajentuneet.
Järjestelmät on suunniteltu automaattiseen ja manuaaliseen ohjaukseen asynkronisilla sähkömoottoreilla varustettuja pumppuyksiköitä, jotka toimivat vesi- tai viemärijärjestelmissä ylläpitämällä tiettyä vedenpainetta pääjohdossa tai tasolla teknisissä säiliöissä.
Pumppuasemilla varustettujen automaattisten vedenkäsittelyjärjestelmien mahdollisuudet:
· Automaattinen, manuaalinen etäterapiaa pumppausyksiköt;
· Tietojen kerääminen kontrollikohteen ihon tilasta;
· Tietojen kerääminen tulo- ja lähtöteiden, tasojen parametrien asetuksista;
· Lähettäjän suorittama sulku- ja ohjausventtiilien ohjaus automaattisessa, manuaalisessa ja etäkäytössä;
· Tietojen näyttäminen objektien tilasta graafisessa editorissa ohjauskeskuksen näytöllä;
· Kun työskentelet automaattitilassa, hallitse ihopumpun käyttöaikaa.
· Asemat tarjoavat:
· Säästöt energiankulutuksessa (vähintään 50 ... 65 %) ja vedenkulutuksen vähentäminen;
· Aloitusvirtojen vaihto marginaalissa;
· Pumppujen sähkömoottoreiden pidentynyt käyttöikä;
· Muutos piirustus- ja korjaushenkilöstön määrässä.
Pumppausasemien ejektoreiden Vikoristannya
Porakoneen pumppuasemat on varustettu joko vesi- tai vesisuihkuejektoreilla, jotka on liitetty alakeskuksen suihkupumppuun. siilictor- laite, jossa kineettistä energiaa siirretään yhdestä väliaineesta, joka romahtaa enemmän juoksevasti, toiseen. Ejektori, työn alla lakiBernoulli, Luo alennuksen kapenevaan verkkoon yhden keskiosan paineen, joka vaatii siirtymistä toisen keskiosan virtaukseen, joka sitten siirretään ja poistetaan kosteusenergian paikalta ensimmäisellä rikkidovishtalla. Ensimmäinen vaihtoehto perustuu lisääntyneeseen luotettavuuteen, jossa on mahdollista vapauttaa korkea paine riittävällä liotussyvyydellä käytännön pysähtymistä varten. Projektorit valmistetaan erityisesti käsin ”pää”-tyyppisissä kairarei'issä, jotka ovat maahan upotettu putki vettä kantavaan palloon asti. Toisessa on lakka-asema päävicoristovo ti Tii pumpulle, yksi niistä neljännesvuosittain ei ole hengästynyt, vaan Vynosni, ja Pidnimati Zi Sverdlovin Pilim ja May Glibin jopa 50 metriä. Pääyksikkö nostetaan ja kaksiputkinen ejektori laskeutuu alas. Useimmiten tällainen vesihuoltojärjestelmä asennetaan merkittävälle vesihuollon tasolle asuintiloista. Sen puutteet ovat kriittisiä, kunnes vesi muuttuu sameaksi ja suhteellisen alhainen CCD.
Tietoja pumppaamoista.
Tunnettuja valojohtajia, jotka tuottavat teollisuuden ja kotitalouksien pumppaamoiden hinnaltaan ja toiminnallisuudeltaan parasta, ovat italialaiset Marina ja Calpeda. Ennen kuin siirrät seuraavat tiedot, lisää:
· Luotettavuus;
· Hiljainen toiminta;
· Yhteyden ja liittämisen helppous;
· Riittävä mallivalikoima;
· Täysi setti;
· Kompakti;
· Automatisoinnin yksinkertaisuus ja harkittuvuus;
· näkyvyys tehokkaita ominaisuuksia zakhistu;
· Merkittävä moottoriresurssi.
Pumppuaseman hinta riippuu mahdollisuuksistasi. Seuraavat sarjat ovat suosituimpia ostajien keskuudessa:
· sarjaCAM veden toimittamiseen Sverdlovinista Glibiniin enintään 9 metriin;
· sarjaAPM vesihuoltoon Sverdlovinista Glibiniin enintään 25 metriin;
· Idromat-sarja automaattinen järjestelmä, joka perustuu Idromat-ohjaimeen.
· Sarja BS. Tehostusasemat, jotka sisältävät jopa 6 pumppua;
· sarjaMINIMAT, TURBOMAT, CENTRIMATіGETTOMAT. Automaattiset järjestelmät kalvosäiliöllä;
· EASYMAT-sarja. Kompaktit asennukset.
Pumppuasema säädettävällä IMS-pohjaisella sähkökäytöllä
Pumppausasemille on tärkeää asentaa säännellyllä sähkökäytöllä omaavia tykkejä, koska meillä alueella on takuu, kilpailukykyiset hinnat omistuksesta ja sähköenergiasta ja muista virkamiehistä veloitetaan roboteissa NIIVODGEO. Näiden oletusten kokeellinen tarkastus suoritettiin Ivanivskin pumppausasemalla Moskovassa. Tälle asemalle on asennettu kaksi pumppuyksikköä, joissa on kuusi IMS:llä varustettua yksikköä, jotka valmistetaan sarjassa. Koneiden nimellisparametrit: virtaus 800 m3 / vuosi (O, 22 m3 / s), paine 33 m (O, 33), voima 160 kW, pyörimistaajuus 960 rpm, vääntömomentti IKS 1, 60 kNm (160 kgf / m ) . Asennuksen käyttötapaa ilman ohjattua sähkökäyttöä säädellään pumppausyksiköiden säännöllisellä päälle- ja poiskytkemisellä. Kytkentämääräksi tuli 30-40 yksikköä kohden, ja vuorovesialtaassa käyttöyksiköiden määrä muuttui 1:stä 6:een. Automaattinen ohjausjärjestelmä muuttaa yhden tai kahden ohjausyksikön ja maanalaisen kiertotaajuutta, käyttöyksiköiden lukumäärä vain ennen kuin vuorovesi muuttuu. Kiertotaajuus muuttuu pakosignaalin mukaan, joka syntyy, kun taso poistuu väliasetuksista. PI-lain mukaan generoitu signaali menee IMS-tyristorihälyttimen pulssivaiheohjausjärjestelmän tuloon. Tim itse säätelee pumpun sähkömoottorin aktivointivirtausta ja siten pyörimistaajuutta. Vuoroveden todellisissa muutoksissa, jos ohjauspumpun taajuuden muutos ei takaa tarvittavaa muutosta pumppausyksikön syöttöön, muutostarve syntyy. halal numero asemalla toimivat yksiköt. Mikä on yksikön tarkoitus säänneltyjen ja ei-säänneltyjen yksiköiden vuorovaikutuksessa? Yksikkö käynnistää spin säätelemättömistä laitteista ja pakottaa IKS:n aktivoitumisen virtauksen maksimiarvoon (5 A) sillä hetkellä, kun ohjauspumpun pyörimistaajuus laskee tarpeeksi alhaiseksi, jotta sen luistiventtiili sulkeutuu ja pumppu alkaa pumpata. Jos säädetyn pumpun pyörimistaajuus saavuttaa maksimiarvonsa ja sisäänvirtaus jatkaa kasvuaan eikä laitteisto pysty pumppaamaan jätevettä säiliöstä, yksikkö kytkee lisäksi päälle yhden säätelemättömän yksikön ja muuttaa IMC-hälytyksen minimi. Järjestelmä varmistaa pumppausaseman säiliön pinnan tasauksen 50 mm tarkkuudella ja lyhytaikaiset säädöt (jopa 350 mm) kytkettäessä tai irrotettaessa säätelemätöntä pumppuyksikköä. Järjestelmän avulla voit säätää useiden yksiköiden pyörimistaajuutta kerrallaan, tässä tapauksessa kahden yksikön. Tällaisen robottitilan tarve syntyy, kun vuorovesi siirtyy hieman yhden pumpun syötön yli. Tällaisissa järjestelmissä säänneltyjen ja ei-säädeltyjen yksiköiden toiminnan välillä on rinnakkaisuutta, joten säädetyn yksikön kysyntä on vain 5-10 % nimellisarvosta. Pienetkin vuoroveden muutokset johtavat säätelemättömän yksikön päälle- ja poiskytkentään. Tämän seurauksena syntyy merkittäviä virtauksia, joita ohjausjärjestelmä ei voi koskaan poistaa. Kahden ohjausyksikön synkroninen toiminta, joka vastaa yhden korkeapaineyksikön toimintaa, välttää epävakaiden toimintatilojen syyllisen. Ohjausjärjestelmän parantaminen mahdollisti sähkönkulutuksen vähentämisen noin 10 % eli 170 000 kW jokea kohti sekä pumppausyksiköiden lukumäärän 30:stä 3 yksikköön.
Pumppuyksikön tehokkuuden kasvu varmistetaan ottamalla käyttöön laite, joka muuttaa käyttöyksiköiden lukumäärää ennen kuin pumppausyksikön säätö menee luvattoman alhaisten hyötysuhdetekijöiden alueelle. Tällainen laite purettiin VNIIVODGEO:ssa ja sitä testattiin yhdessä olemassa olevista Moskovan pumppaamoista. Välittömästi käytön jälkeen, paljastuttuaan IC:iden erittäin alhaisen luotettavuuden, alamme valmistaa ne massatuotantona, joten niitä ei voida suositella laajaan käyttöön ennen kuin ne ovat saaneet rajoitetun ilmeen. yritykset. Laitoksella testattiin useita ohjausjärjestelmiä: erityyppisillä erillisillä ja analogisilla säätimillä. Pumppausasemien mielestä analogiset kytkimet, joissa on soittoääni, näyttivät luotettavimmilta.
Pumppuasema säädetyllä sähkökäytöllä AVK-piirin takana
Moskovassa toimii enimmäkseen Kuntsevskajan pumppausaseman SNU, johon on asennettu kuusi pumppuyksikköä, joiden teho on 800 kW, mukaan lukien 3-4 työntekijää. Automaattinen ohjausjärjestelmä koostuu yhdestä asynkronisesta sähkömoottorista, jonka vaiheroottori teho on 800 kW ja pyörimistaajuus 740 rpm, kääntäen AVK:n, jonka toiminnot perustuvat TDP2ZO4OO-T-yksikköön, joka koostuu tasasuuntaaja ja invertteri, tasoituskuristin FROS-800, muuntaja TS4OO, asemaohjaus P3DU90248A ja käynnistysvastukset, tason vaihto, joka koostuu tuulikellosta ja paine-eromittarista; PI-ohjain. Järjestelmä stabiloi säiliössä olevan raaka-aineen 7-10 cm tarkkuudella.. Korkeampi tasonvakauksen tarkkuus aiheutti sähkömoottorin pumppuun yhdistävän elastisen kytkimen sormien liikkeen. Säiliössä olevien säiliöiden kuluminen lisääntyi (säiliön korkeus on jopa 20 cm), mikä halusi lisätä itseliikkuvien aseiden herkkyysaluetta ja vähentää tasonvakauksen tarkkuutta. Yksikön taajuudensäätöjärjestelmän periaate on samanlainen kuin edellä kuvattu. Asemalla toimivien pumppuyksiköiden lukumäärän muuttamisen tekee käyttöhenkilöstö. Järjestelmän käyttö pumppuyksikössä säästää noin 600 700 tuhatta. KW/vuosi sähköä eli noin 4-5 % kokonaisenergiankulutuksesta.
Lisäinvestoinnit pumppausyksikön ohjausjärjestelmän asentamiseen olivat 15 tuhatta euroa. Hieroa. Pumppuyksikön säätö kestää jopa 5000 vuotta.
Tällä hetkellä automaattisen ohjausjärjestelmän tehokkuuden parantamiseksi ja säädetyn pumppuyksikön kulumisen vähentämiseksi suunnitellaan varustaa toinen pumppu samantyyppisellä säädetyllä sähkökäytöllä.
Taajuussähkökäyttöiset pumppuasemat
Mosvokstroyn pumppausasemalla (Moskovan metroasema) on pumpun hätäoikosuljettu asynkroninen sähkömoottori, jonka jännite on 110 kW/vuosi, joka kytkeytyy päälle PCHT:n uudistamisen kautta ja joka jakautuu NDI CHEMZ:iin. Sähkökäyttöinen lämmitysjärjestelmä on suunniteltu samalla tavalla kuin aiemmin on kuvattu, paitsi että se on ultraäänivirtausjärjestelmän EXO3 muuntaja. Taajuussähkökäytön käyttö tässä asennuksessa muuttaa kulutetun sähkön määrää 60 tuhannella. KW - vuosi jokea kohti, sis. noin 5 %.
Moskovan pumppuasemilla käytetään PhR-2-tyyppisiä taajuusmuuttajia ja suomalaisen Stromberg-yhtiön tuotantoa, jotka perustuvat 10 automaattisen ohjausjärjestelmän luomiseen ja käyttöön pumppuasemien toimintatilaa varten 75 - paineyksiköillä. 160 kW. Strombergin SAMI-tyyppiseen kiinteään taajuusmuuttajaan perustuva ohjausjärjestelmä on ollut toiminnassa Novo-Nagatinskajan asemalla kolme tuntia, mikä takaa 7-8 %:n energiansäästön kokonaiskulutuksesta.
Strombergin taajuusmuuttajat ovat korkeapaineisia ja niissä on kompaktit ohjausominaisuudet pumppuyksiköille. Pumppuyksiköiden tasaisen virtauksen varmistamiseksi siirretään laite, jonka kautta voidaan kytkeä jopa yksi pumppu.
Johtuen ulkomaisten PChT-tyyppisten taajuusmuuttajien pysähtyneisyydestä Kharkovissa, EKT-tyypin - Leningradissa ja muissa.
Pumppuasema, jonka käyttö perustuu venttiilin sähkömoottoriin
pumppuaseman sähkökäyttö
Moskovan Filyovskajan pumppuasemalle asennettiin automaattinen ohjausjärjestelmä, jossa on venttiilin sähkömoottoriin perustuva säädettävänopeuksinen sähkökäyttö. Kuudesta asemalle asennetusta 30-FV-17-tuotemerkin pumpusta yksi niistä on varustettu sellaisella sähkökäytöllä NDI KHEMZ:n valmistaman PCHVN-muuntimen tuotannosta. Sähkökäytön teho on 1600 kW, moottorin jännite 10 kV. Liitännät kytketään takaisin virransyöttöön 4000 kVcha:n painoisen kuivamuuntajan kautta, ja moottori kytketään uudelleen saman nostomuuntajan kautta. Muuntajan varastosta löytyy myös synkronisen sähkömoottorin aktivointijärjestelmän tyristorimuunnin, joka asennettuna ei korvaa sähkökäyttöä. Sähkökäyttöinen pumppujärjestelmä on samanlainen kuin edellä kuvattu. Rikkomustason anturina kellon soitto ja paine-eromittari 0-5 mA ulostulolla. Lähiohjausjärjestelmässä on R-17-tyypin PI-säädin. Säädellyllä sähkökäytöllä varustettujen itseliikkuvien aseiden asennus vähensi kulutetun sähkön määrää noin 1200 tuhannella. KW-vuoden rik, pumppauslaitteiston toiminnan tietoisuus helpotti, käyttöhenkilöstön tietoisuus helpottui. ACS-robotin ja vykonana-suunnittelun analyysi osoittaa, että samanlaisen sähkökäytön hallussapito toisessa pumppausyksikössä mahdollistaisi energiansäästön lisäämisen jopa kaksinkertaiseksi. Asemalla tarkastettiin laitteet, jotka käynnistävät ohjauspumpun toiminnan matalapainealueella.
Lähetetty osoitteessa Allbest.ru
...vastaavia asiakirjoja
Voittopumppaamot jäteveden pumppaamiseen jätevedenpuhdistamoista, suunniteltu asennettavaksi lohkoon, jossa on jätevedenkäsittelyalueet. Lisävarusteiden valinta. Tekninen ja taloudellinen kehitys, tekninen.
kurssityö, lisää 01.09.2014
Tuotostiedot öljyputken teknistä kehitystä varten. Putkiterästen mekaaniset ominaisuudet. Teollisuusbensiinin putkilinjan teknologinen kehittäminen. Putkilinjan ominaisuudet ilman silmukkaa ja pumppuasemia. Pumppausasemien asennus reittiprofiileihin.
kurssityö, lisää 3.4.2014
Taajuusmuuttajaan perustuvan pumppuaseman ohjausjärjestelmän kehittäminen. Sähkömoottorin suunnittelu ja mekaaniset ominaisuudet. Värinä muuttaa taajuutta. Taloudellinen vaikutus ja ehdotetun ratkaisun kokonaisuus.
tutkintotyö, lisää 01.08.2012
Pumput ja ilmanpuhallusasemat ovat vesihuolto- ja viemärijärjestelmien pääasiallisia energialähteitä. Muuta robottipumppuaseman tilaa. Valitse gospodarsko-butovye-pumppujen merkki. Pumppuaseman layout, lisälaitteiden valinta.
kurssityö, lisää 16.12.2012
Metsästysaseman päätarkoitus on suunnittelu. Pumppausasemien jauhamisen ominaisuudet. Nämä tiedot muodostavat hankkeen perustan. Kuvaile sporudi-solmua rakenteellisesti. Hydromekaanisen, energisen hallussapidon värähtely.
robottiohjaus, lisää 30.11.2012
Teollisuusbensiinin esiintymän kehitys- ja hyödyntämisvaiheet. Sverdlov-tuotteiden keräys ja kuljetus Loveno-perheellä. Tehostepumppuasemien käyttötarkoitus, prosessin vuokaavion periaatteet. Poikkipinta-alakeskuksen pumpun toimintaperiaate.
kurssityö, lisää 27.3.2016
Pääkaasu- ja öljyputkien suunnittelu, pääputkilinjan reitin valinta. Tekniset kaaviot kompressoriasemista, joissa on alikeskipainepumput. Pumppausasemien ja öljyputken lineaaristen osien täydellinen toiminta.
kurssityö, lisää 17.5.2016
Öljynpumppuasemien ja kompensaattorien suunnittelun ominaisuudet. Tärinäon liittyvien ongelmien pääasialliset syyt liittyvät tärinään. Tärinän vähentämiseen tähtäävien lähestymistapojen kehittäminen lisäämällä pumppuputkiin palkeet yleiskäyttöiset linssikompensaattorit.
tutkintotyö, lisää 16.5.2017
Analyysi sauvaporauspumppuyksiköiden (SSPU) pysähtymisestä nykyaikaisissa kaivoksissa. Järjestelmä lisää ShSNU:n, suunnittelun, laitteiden valinnan. Kemialliset sauvapumput, niiden käyttötarkoitukset ja suositeltava kuivausalue. Robottitautien ominaisuudet.
robottiohjaus, lisää 19.1.2016
Kaasunjakeluasemien luokitus (GDS). GDS:n toimintaperiaate on yksilöllinen suunnittelu. BK-GRS-I-30-merkkisen lohkopakatun GDS:n ja AGRS-10-merkkisen automaattisen GDS:n teknologinen kaavio. Tyypillinen kaasunjakeluaseman omistus.


