講義計画
1.本社
2.揚水ユニットの基本的なプラント自動化
3.給水自動化のための産業機器
4.keruvannyaポンプのシステムは周波数を再変換します
5.給水を自動化するためのセンサーと特別なリレー
7.1本部
ポンプは素朴で、活発な変化(vmoktuvannya、nagnіtannya)rіdinivnaslіdokpovіdomlennyaenergіїに役立ちます。 ポンプはdvigunの機械的エネルギーを国のエネルギーに変換します。国のエネルギーは変化し、副を動かします。 ポンプと次のグループの分類について:
私たちのクリーンアップユニットは、1日あたり最大50百万ガロンに近い平均硝子体を遮断します。 スループット容量追加で2億2000万バレル。 サンプリングシステムも運用しています 廃水廃水の横滑りのための他のステーションがあります。
この重力伝達のおかげで、ターンから浄化装置までの廃水の領域が使用され、グライドウォーターウィンドウには、他のパイプに冷水を供給するためのステーションまたはポンプステーションを供給する必要があります。 Miは、通常のロボットを固定するための遠隔制御皮膚チャネライゼーションポンプステーションとペアステーションです。 外出しないとすぐに、中央ディスパッチャからの清掃設備の些細な信号を受け入れることができます。 ポンプミル、ポンプの始動と停止の数、ポンプの運転時間などの情報がリモートで監視されます。
共同および工業用水供給;
Sverdlovinから水または油を供給するためのzerryuvalny;
循環;
にぎやか;
水はけ;
石油とナフサの輸送用。
ポンプは、原則として、トリッキーなnavantazhennyaモードで動作します。 , 運命に向かって伸びることによって、私は年数を意味します。 ドライブモーターシャフトへの取り付けは、再配線なしで正常です。 Naybіlshは、ポンプの供給を調整するための徹底的な方法であり、周波数の変更とモーターのラッピング、調整の範囲は大きくありません。 okremikh vipadkahがない場合は、より広い規制が必要です。
少し前に、1つのポンプ場にkeruvannyaの新しい要素を設置しました。 ポンプ場の中央局の緊急切り替えの自動システムを壊しました。 また、最近、リモートテレメトリ機能、および冷水からのリモートステーションの制御と監視を克服しました。
ポンプ場によるKeruvannyaブロックの近代化
緊急切り替えの追加自動システムで近代化されたポンプ場は、すべてのラインに沿って起動された連続システムからの2つのポンプから保管されました。 ポンプ場の制御ユニットは、skhvishchの水位を制御および制御するために使用されます。 ポンプの始動とポンプアップのコントローラーは、koristuvachのレベルまで構成されています。 また、高レベルと低レベルの信号を保持し、「手動」モードまたは「自動」モードのポンプ要素があるかどうか、およびリレーが逆になっている場合は通知します。
ポンプの駆動およびファンの場合、規制されている電気駆動のより広い範囲までの明らかな傾向には重要ではなく、不規則性のポンピングが主なものであると考えられています。 ドライブを拡張します。非同期モーターが短絡したドライブです。 300 kWを押し下げるときは、短絡モーターを使用して同期モーターを停止します。 ドレンの後ろで、始動ストラムを加速するために始動が必要な場合、フェーズローターを備えた非同期モーターが勝利します。 ロボットの頭の後ろにあり、ポンプの生産性が、たとえば給水システムのポンプの場合、またポンプの場合など、広いギャップで変更する必要がある場合、電気駆動の調整は静かな低下で停止します循環の生産性の自動調整が必要です
ポンプが最初に起動し、ポンプが1時間切れ、ポンプがスムーズに動作する、これらのポンプ用プログラムのポンプステーションのブロック。 最初のポンプが十分な排水の流れを提供できない場合に別のポンプを始動するプログラムもあり、許容範囲内の穴の中央が調整されます。
作業時に修理が進行中でない限り、ステーションが正常に機能できるようになるまでの剛性の機能。 1対のコンタクトは皮膚機能に使用されます。 私たちからの振動は、交換のために数日間私たちの手に渡ることができ、私たちはシステムを迅速に開発することができました。
ポンプユニットは、多くの場合、ポンプステーションで結合され、1つのネット上に多数のポンプが並列に接続されています。
多くの固定ポンプは流動性の調整を必要としません:消防ポンプ、ポンプおよび水道本管、多数の鉱山および鉱山給水設備などがあります。
ポンプ場の吸引によるケルバニヤのスキーム
駅の監視を担当しているオペレーターから何度も電話があったり、現場で現場を見てほしいと言われたりします。 インターネット接続を通して見られるように、接続を保護するために、私たちは別の接続方法を選択することを余儀なくされました。
私たちの配電会社は、光-光インターネットサービスを実装しています。これは、実際のところ、問題の解決に非常に重要です。 この日は、パイロットプロジェクト、vikoristovuchi tse vysokoshvidkisnez'єdnannyaの適切な候補を見つけることができるように、サイトを見積もります。
7.2揚水設備の基本的なプラント自動化
主要な設備に近い場合は、小さなATKの揚水設備の管理、自動化システムの開発をお願いします。 ショーの終わりに、主要な自動化作業が鉱山から都市に水を運ぶプロセスに変換されます。
鉱山から水を汲み上げるプロセスの自動化の主な機能は次のとおりです。
システムの近代化とコストzusil
ポンプ場の新しいコントロールユニットが上に現れましたが、コントロールシステムはオリジナルではありません。 理事会の運営要員を最後に現場に派遣した人や、過去数年間に必要となる電気制御を開発した人の数については、具体的な記録がたくさんあります。
抗議したいのであれば、メッセージの自動ミキシング機能を必要とするような状況はまだありませんでした。 Yakshchotseryatuє私たち一度、tse chetuvalZusil。 ハードウェアはモジュール式であるため、追加購入する必要はありません。 あなたがvvazhaєteであるならば、80以上のサイトがあります、経済はすぐに合計することができます。
-サービス要員が常に立ち会うことなく、給水の正常な機能を確保する。
-水位からの休耕地および調整ユニットの境界にある集水器でのポンプの始動とポンピング。
-ポンプユニットによる自動keruvannya;
-Pochergovaロボットポンプユニット;
– 自動的に含まれます故障の場合のスタンバイポンプユニット 自動接続熱血;
最初の部分では、プロジェクト全体とプロジェクトに必要な変更について説明します。 友達- 理論的根拠、設計の合理化に必要です。 作業員はポンプ場に向かって開いているため、ステーションから来ます。イントラネット接続があり、ステーション間でロボットを同期させると同時に、プロセスがステーションを通過できるようにします。
あなたはバガトフの状況で地理について話す必要があります、満足のためにあなたはポンプ設備を持っている必要があります。 まったく同じ電子工学がプロセスの最適化に関与する可能性があります。 ロボット全体で採用されている設計は、飲料水だけでなく、あらゆるタイプのポンプユニットに停滞しています。また、悪意のあるポンプ場にも適応できます。 Qiaの適応性は、3相モーターを必要とせずに相互接続されます。 システムは、1時間の間、経済を維持し、プロセスの特定の問題に対してプロセスを最適化することができます。
-洪水の新しい方法を保存する可能性:タンクアキュムレータによる; お金から 排水ポンプブラストチャンバーの上; 入口からパイプラインまで。 追加のポンプとサイフォン方式。
-1時間のDozuvannyazavannya;
--Shvidkannya peremikannyaz自動keruvannyaが手元にあります。
さらに、水を供給するプロセスの自動化システムは、印刷しないことで有罪となります。
オペレーターがプロセスに注意するのに必要な年数をスピードアップすることができます。実際のところ、変換するだけで十分です。 ポンプ場オフィスガードで dovkillaそして母親はオペレーターを奪われます。 あなたはvpevnen_stでrozrahovuvatiをすることができます、それはタンクに水があるでしょう。
これらすべての機能については、ダウンタイムや折りたたみ式システムの場合、制御対象のシステムのタイプに基づいたものや、整流子、リレー、時間制御などの倉庫と倉庫を操作する必要があります。 。 コントローラーは、始動、加速、速度の調整、気密性の調整、調整、反転、ズピンカなどの開発機能を表示します。 オペレーターが切り替えを変更したりボタンを押したりする罪を犯しているvіdomyyakmanualkeruvannyaのようなランクでは、私は機械やシステムの働き方の変化が好きです。
-油圧および修理ロボット用のokremimiユニットの(手動での)制御の誤り。
-自動モードでロボットに損傷を与えることなく、多数のポンプユニットを制御します。
-生産性が低い、または低い場合の緊急ポンプzupinka、ベアリングの過熱、コントロールランスのノックイン、短い吃音;
リトル1では、コントロールのタイプが完璧で、バチッティを行うことが可能であることが示されていますが、スターターがいる場合は、オペレーターがそこにいます。 図1電気モーターを使用して手動でkeruvannya。 リトル2には、nap_vatomatichneコントロールが表示されます。そこでの縫製のオペレーターは、ボタンが削除されます。
小さい。 2 Napivautomatichnekeruvannya電気モーター。 Pochatkovozamovlennyaє自動、またはボタンや変更のパネルに手動のケルバンを表示するために呼び出すだけです。 そのようなランクでは、スキームが1つ以上の自動アタッチメントを復讐することである場合、それは自動的に運ばれます。 keruvannyazmushuєボタンのシステムは歌の瞬間にアクティブになり、スキームは自動的に閉じられます。 Yak tilki lantsyug zakritiyは、電磁スターターにロボットを送信させて、dvigunロボットを起動させます。
-ブロッキング。これには、ポンプが満たされていないときにポンプユニットを始動する、ポンプユニットを始動する前にポンプモータードライブをオンにする、ポンプが再び閉じるまでポンプユニットを閉じる、ポンプをリモートでオンにするなどの可能性が含まれます。水が水タンクで流れている場合、ポンプは再びオンになります。
揚水ユニットの主なプラントの自動化
Malunok3電気モーターによる自動keruvannya。 それはプログラムされた論理コントローラーである必要があります。大規模な場合、最後のリアルタイムプロセスの管理を意味し、そのプログラムの管理は、コンピューターの知識がなくても、電気および電子メッセージから担当者が表示できます。 また、ボタンが接続されるまで、検出器とアクションが接続されるまで、コンタクタコイル、電気バルブ、ランプなどが接続されるまで、入力クレムが表示される黒い画面として表示することもできます。 このようなランクでは、プログラムが保存されている限り、ロボットは皮膚の瞬間にアクティブになる入力信号から取り残されます。
-ポンプの生産性、ベアリングの過熱、吸引位置の監視。
-ベアリングの過熱とベアリングの過負荷からのgidravlichnyzakist、zajist;
-信号化:揚水室で-ポンプユニットの緊急接続と制御ランスの応力の出現について。 鉱山の中央派遣地点で-ロボットポンプユニット(svitlov)、ポンプユニットの緊急スイッチオン(アラーム信号)、集水器での緊急水流、信号レーンの不一致についてコントロール(音と音)
追加のリレー、ブロッキング、タイミングなどを備えた従来の要素。 є内部。 実際のところ、koristuvachのディレクターはプログラムが発行される前に作成されます。有罪の当事者が現在のプログラムからのスキンメッセージをアクティブ化する責任があるため、入力信号間の接続を相互接続します。
恩赦の訂正のためのプログラムの変更。 従来の地方制度では、一定の需要で変更があるかどうか、多くの時間、変更の導入のために、管理の支払いを上書きする必要があります。 低品質の技術的進歩により、小型で安価な所有物で高度な機能を使用できるようになりました。 速く働く。 従来のリレーは1時間は取るに足らないものです。 Nadezhnost全体がnad_ain_she、n_electromechanicalリレーおよびタイマーをしっかりと所有しています。
水運搬能力の技術スキームから独立して zagalny zavdannya油圧設備の自動化:
-Vivilnennyaサービス担当者;
-ベッドサイドロボットの信頼性と安全性を向上させます。
-生産性の調整のためのロボットポンプの最適モードの確保。
SRCPでの揚水ユニットの自動化プロセスの制御と経済効率の位置付けは、次の2つの段階で発展しました。
レコードのイメージを作成するために、koristuvachのプログラムの断片は、レコードの数に1秒もかからずに動き回る罪はありません。 訪問者のプログラムの最後のサイクルで切り取られた最後の画像まで、エントリのリストを更新します。 入力には2つのタイプがあります。デジタル入力デジタル入力。
再作成の価格は、歌の正確さ、または別の建物と時間の皮膚の歌の間隔を示すことです。 アナログ入力のモジュールは、読み取りと書き込みが可能です。 入力には、デジタル入力の2種類があります。 静的出力モジュールは、力を供給する場合、まったく同じルートで操作できる要素にのみ作用し、電気出力のモジュールが出てきた場合は、要素に注ぐことができ、使用することができます冬の間。 Qi napruga abo strumは、可変速度、オーブンサイリスタステップ、温度レギュレータなどのアナログ制御を受け入れる操作メカニズムの制御プラントとして機能します。
最初のステップは、集水器の給水機能でポンプを起動してポンプで送るプロセスの自動化です。
別のステップは、ロボットによる水置換設備の最適なモードを確保するためのポンプの自動ポンプです。
自動化の第一段階の経済性は、サービス担当者が担当します。 自動化の別の段階では、効率が達成されます。
アナログ信号は、入力モジュールと出力モジュールの両方に対して優れた適応プロセスを経ます。 ブロックはプログラムコンソールです。最後の指示、プログラムの保存方法、表示方法を入力して明確にするためのプログラマーによる、ノーズ、ハードウェアデバイス、およびソフトウェアセキュリティのセット全体です。 このようなランクでは、準備プロセスの途中で悪臭が絡まることはありません。
入力画像の開始と同時に入力画像を確認するには、できるだけ早くプログラムを参照してください。 その構造はニーズに応じて順序付けられていますが、但し書きロジックを備えたコントロールランスに基づいているため、クイックコールの助けを借りて、最も正規化されたオープンコンタクトの1つです。 赤ちゃん6は連絡プログラムを示しています。
a)給水用の油圧および電気回路の簡素化のため、 フラッディングシステムや折りたたみソフトウェアの付属品は必要ありません。
b)30-50%の速い水の摂取;
c)電気モーターのひずみとポンプの生産性の35-75%をスピードアップします。
p)揚水設備の信頼性の調整。 どうやら、すべてのビューの80%近くが、ロボットでポンプを始動した瞬間です。
e)ポンプの作業ゾーンと産業循環の増加のためのポンプの変更の数の減少。
SRSRでは、自動化の最初の段階に主な敬意が払われていました。 自動化の最初の段階の前に、制御装置は3つのタイプの制御を提供できます:自動、リモート制御(給水室で)およびリモート制御(ディスパッチャーから)。
これは、ここ数年で、水圧ポンプの最も直接的な自動化(遠くの外国人で最も人気がある)の人気が、周波数調整された非同期の1つのポンプに基づいて人気が高まったことを意味します電力供給。 そしてここで、dvigunの衝動は可能な限り最大の水の流入、tobtoから振動します。 ドライブ上で可能な限り最大のnavantazhennyaを使用します。 このようなランクでは、平均的で少ない水の流入で、エンジンの人員が不足している可能性が高くなりますが、速度の変更によって補われます。レガシーとして、私は仕事を変えて電気を運転しようとしていますドライブ。
7.3給水自動化のための産業機器
水力学的設備を備えた自動ケルバニヤの場合、次の機器が使用されます。
AVO-3は、最大120kWの短絡非同期モーターからの1つのポンプを使用して設置します。
高電圧および低電圧の非同期短絡電気モーターを備えたポンプを設置するためのUAV。 UAVの機器は統一されており、より正常であり、ポンプの自動化のために装備することができます。
高電圧および低電圧の非同期短絡電気モーターを備えたポンプ(最大9個)を備えた設置用のVAB。 機器は、ガスやのこぎりで安全ではない鉱山に保管することができます。
水置換設備を使用する操作の前に、ポンプをロボットに変える前にポンプを充填してください。 最も広い拡張の最後の1時間で、下のレベルの下部にある取水口に配置され、継続的に水が氾濫しているZPNフィラーポンプの助けを借りて、氾濫の邪魔をしました。
リトル7.1では、自動水置換設備の水力図が表示されます。
Malunok7.1。 自動揚水設備の水力図
ここに表示されているもの:1-センサー; 2-コントロールユニット(コントロールリレー); 3-電気駆動による吸引のvikonavchyメカニズム; 4-ロータリーバルブを備えた給水パイプライン。 5-センサーリレーバイス; 6-温度センサー; 7-センサー-生産性のリレー。 8-精練プライミングポンプ。
機器BAB自動、遠隔、手動で制御されるポンプユニットを保護します。
自動モードでは、機器には、集水器の給水から落下したポンプユニットが含まれます。 始動装置のオーバーヘッドと油圧ショックをオンにするためのポンプユニットの並列ロボットを使用して、ポンプに電気モーターを1時間含めることを確保します。 ロボットが出て行くときにバックアップポンプをオンにします。 メインポンプの補助ポンプによるフラッディングと1時間のフラッディングの制御、ロボット工学の生産性の制御、および緊急モードの回復。
ロボットは自動モードでBABスキームを見ることができます。 図に引っ掛かっている。 7.2 1台のポンプの自動化の電気回路図は、出力ミルにとって重要です。
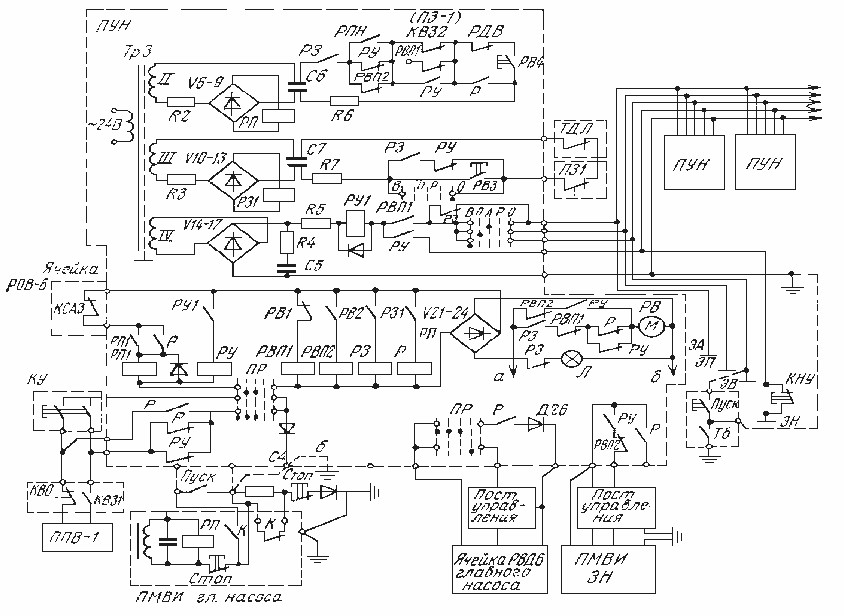
マルノック7.2。 VAV装置の電気回路図
PRの位置のオーバーライドは、上位レベル(B)のロボットポンプの位置に取り付けられています。 新しいスリーピングエリアのケルバニヤユニットに電圧が供給されると、信号灯がリレーに送信され、レーンのRZ1を切り替えます:III変圧器Tr3の巻線、コンデンサC7、温度センサーTDLの接点、エンドキャップVimikachPZ1、モードC7、D7 PR10抵抗器-D13、抵抗器R3、巻線IIITr3にオーバーライドします。 P31リレーは、ラッチ接点でRZのリレーのリレーをオンにします。これにより、lantsyugをオンにして、充填およびヘッドポンプをオンにする準備が整います。
上位EVのセンサーが水に接触している場合、中間リレーRU1とspratsovuє(巻線IV Tr3、D14、D17、R5、RU1、RVP1、PR、EB、水土、巻線)の寿命のランスIV Tr3)は凍結されています。 制御リレーRUに独自のラッチ接点スイッチを備えたリレーRU1(導入b、D21-D24、RU1、RU、PR、入力a)、独自のラッチ接点RUおよび電極と同様に、リレーRU1の接点を静かになるまでシャントします。集水器RivnyaelektrodaENの近くの水。
開閉装置リレーは、点滅接点(ヘッドポンプのプライミングが修理されている)とモーターリレーのエンジンMモーターリレーを備えたプライミングポンプランチャーのスイッチをオンにします。
時間枠内で、リレーRV4の接点が停止し、リレーRPがオンになります(巻線II Tr3、C6、R3-RVP2、RU、RDV、RV4、R6、C6、D6-D9-R2、巻線II Tr 3)独自のラッチ接点がリレーをオンにして、ヘッドポンプRの始動をオンにします。シャットオフ接点を使用すると、PPV1ランチャーをオンにしてブロワードライブを起動し、RVD6コンボボックス(高電圧dvigun)またはヘッドポンプのランチャー(低電圧dvigun)。
383秒(ヘッドポンプのロボット化の1時間)後、PB2リレーの接点が停止し、PBのモーターリレーとRPリレーのエンジンのランタンを開くようにRVP2リレーがオンになります。 Dvigun Mが表示され、RVP2リレーはタップ切換器リレー接点によってシャントされます。
ドライブが下のレベルに引き上げられると、RU1のリレーのランスがオンになるため、リレーRU1のランスが解放されます。 ランチャーPPV1をサクションドライブに含める前に製造するため、閉じられません。
ブローが閉じると、KVZ2接点が開き、RPリレーが点灯します。 ヘッドポンプのモーターが裾に見えます。 PPV1ランチャーのトリガーは、KVZ1の終了位置の接触によってオンになります。
リレーRUは、その接点によってモーターMをオンにし、モーターリレーを時間RVに切り替えます。船外機では、モーターMが接点RVP1によってランチャグからオンになります。
7.4典型的なロボットアルゴリズムの分析
近代化のための一連の機器に拡張された鉱山の揚水ユニットのロボット工学の典型的なアルゴリズムに基づいて、揚水ユニットの機能は攻撃的なランクになります。
デバイスがロボットとソフトウェアアドインに含まれている場合、追加の電気センサー(論理的な心)のために集水器の水位が監視されます R)。 水が上位レベルのセンサーまで流れている場合は、ZPN充填ポンプをオンにするコマンドを送信します。このポンプは、プログラムユニットによって送信される1時間ポンプに水を供給します。 注湯速度はリレーバイスRDV(論理ウモバ)によって制御されます k)。 書類のワインのレベルの制御時に、緊急レベル( R= 0)、リミックス図付きのソフトウェアブロックが含まれています n 1時間ポンプし、そうでない場合は、プライミングポンプをオンにします。
ポンプ(または複数のポンプ)が浸水する場合、RPN生産性リレーの補助スイッチの生産性をより制御してロボットに導入するようにコマンドが与えられます(論理的な心 r).
ポンプが所定の生産性(r = 1)に調整されると、回路が切り替えられて下位レベルが制御され、ポンプに到達するとポンプがオンになります。
何らかの理由でポンプが設定された生産性を向上させない場合、ポンプがオンになり、ディスパッチャに信号が送信され、機器はポンプの新しいサイクルに接続されます。
ガイダンスアルゴリズムは、ポンプのスイッチオンとスイッチオンの主な機能を表示する順序を表示します。 それらの順序である自動化装置は、さまざまな制御および技術的機能の表示を維持します。たとえば、TDLの補助センサーのベアリングの温度の制御などです。
このようなランクでは、AT、BAV、KAV、UAVタイプの鉱山給水を自動化し、ポンプユニットの制御の2位置原理のみを転送するための機器があり、ポンプ複合体の効率が節約されます。の必要はありません
さらに、油圧システムのロボット工学の効率の調整は、システムが停止している場合でも達成できるため、ポンプの生産性の調整は、アルゴリズムによって、または中断のないポンプに転送することによっても保証できます。水の(洪水のロボット)。
tsomで:
取水量を30〜50%スピードアップする必要があります。
ポンプユニットの電気モーターの労力を35〜75%スピードアップし、ポンプの生産性のために修正する機会が少なくなります。
揚水ユニットのロボット工学の動作の欠如は変化しており、画像の約60%がポンプの始動時に検出されます。
電気料金が最小の場合、エネルギーが最小の年に集中給水のための水供給へのビタリティの変更。
セントリックポンプの生産性を自動的に調整することは、作業ホイールの円周方向の流動性を変更することなく変更することで実行できます。
水置換設備によるACSの規制の対象は取水であり、その出力パラメータは水位Nであり、これはポンプQの生産性を継続的に調整するために必要です。 そのようなオブジェクトの差分。

de dH / dtは、集水器での水位の変化率、m / sです。
Q pr-水の流入、m 3 / s;
k in = 1 / F-オブジェクトの伝達効率(F-取水面積、m2);
Q n-ポンプの生産性、m3 / s。
Otzhe、ob'єktє一次ランカ、ヤクの伝達関数
ポンプは、入力での作動輪のクランク速度と出力での生産性Qnによって特徴付けられます。 伝達関数を使用して、1次の非周期的ランカによる表現が可能です。
ポンプの電気モーターの寿命の間、周波数fを変更することにより、ポンプのローターホイールの速度のカットを変更できます。
ACSの周波数調整は、TFC周波数を変換するサイリスタによってトリガーされ、制御信号が制御ユニットに送信されます。 オブジェクトNの出力パラメータのVimіryuvannyaは、リモートkeruvannyaに等しいセンサーによって実行されます。 符号は信号の悪さUmіzhに等しく、実際のUは、BOの制御ユニットへの出力信号の性質を示すU3値rіvnіvを設定します。 信号UfとU3は、H3とNfに比例するかのようになります。 敏感なフロート要素を備えた誘導およびレオスタティックセンサー、および他のタイプのrivnemirivは、中断されていないU信号を拒否するために使用されます。
業界の真っ只中の過去数年間で、それはまた、一定の頻度でポンプの生産性を調整する方法を拡大しました。 全体の方法は、シンプルで経済的であることです。
自己調整のモードは、その時点で圧迫があるという事実によるものです a(巻線チューブがポンプのウェットパイプに接続される瞬間)は、水コレクターの水位に比例し、直径a〜bで同じ圧力の静水圧グリップRaで開始する必要があります。
歌うrіvnіНバイスRに関しては、距離a --b、tobtoで濡れているパイプラインでさらに無駄になります。 (R a --R at)0の場合、ポンプに入らないと生産性が最大になります。 (R a --R at)0のとき、ポンプに濡れて落下の生産性を高めます。
自己調整モードでのウェットでの食料供給を伴うポンプの生産性のACSの水力図は、小さな7.3を対象としています。
ACSの規制については、水槽で飲み物を給餌する場合、集水器を使用できます(図7.3、b)。

マルノック7.3。 ポンプ生産性のACSの油圧(a)および機能(b)スキーム
ディファレンシャルスリランカ「ポンプ-パイプライン」(Нс-ポンプ)
de Tn-ランカのPost_yna時間。
qは硝子体の体積です。
Otzhe、lanka "pump-pipeline"є一次の周期的lanka、その伝達関数

Rivnyannyaスリランカ「pidvidnaチューブ」Tは、慣性のpidsiluvalスリランカで表すことができます。
タスクの定式化に関係なく、ポンプユニットの生産性を自動的に調整することで、ケロバンのアルゴリズムを使用して実現できます。 特定のプログラムのzmіnarіvnyaドライブ。 美祢駅のタイヤに乗ったvirivnyuvannyanavantazhennya
同じ時間に、追加の周波数調整の調整がよりタイムリーになります。これにより、ポンプの電気モーターの巻き付けの周波数をスムーズに変更し、そのようなランクで、その生産性を調整し、給水を調整することができます。タスク。
干潮時には、ポンプのdvigunは、わずかな流動性、集水器(サンプ)での低レベルの水の十分な供給、および最小エネルギーでそれ自体を包み込みます。 水の流入量を増やすと、適切な値やエンジンの流動性などの継承を実現でき、生産性が向上します。
7.5再変換周波数からのポンプを備えたkeruvannyaのシステム
非常に近代的です。以前の意味では、追加の調整のために周波数を調整します。これにより、ポンプの電気モーターを巻き付ける周波数をスムーズに変更し、そのようなランクで、生産性を調整して効率を下げることができます。 流入量が少ない場合、ポンプのdvigunラインはほとんど速度がなく、最小(より低い)レベルに必要な剥奪、および最小エネルギーでラップされます。
小さな7.4に、FR-A500ファームのリワーク周波数によるポンプの電気モーターの調整の機能図を示します。 三菱 電気の.
![]()
マルノック7.4。 周波数切り替えによるポンプの電気モーターの調整の機能図
システムの入力では、信号がシステムの入力に送信され、信号はレベルセンサーから受信されます。 設定周波数の信号はレギュレーターにより変更され、ポンプモーターの周波数を変更することでポンプモーターの周波数を変更します。 そのようなランクでは、集水器での水の最小のリンは、rіdiniの潮からすぐに見ることができます。
周波数の近代化により、プログラムされた産業用コントローラーの設定からプログラム的に、追加のハードウェアデバイスなしで、折りたたみ式の制御システムを作成できます。
一般に、不明確な論理の規則に基づいて、油圧ポンプの自動制御システムのロボットアルゴリズムをチェックすることが可能です。
ガルヌロボットを知識の基盤に送るのは簡単です。 下の形を弱める
自分の新参者やロボットのための知識ベースを開発するために勝利した学生、大学院生、若者、あなたは相変わらず年をとっています。
によってマーク http://www.allbest.ru/
モスクワ州教育省
州の予算
中等専門教育
モスクワ地方
「Klinskypromislovo-ekonomіchnytekhnіkum」
トピックの要約:
「ポンプ場の自動keruvannya」
Viconave
学生gr。 TM-11
は。 カレリン
ロボットポンプ場の原理が考慮されています
給水所のポンプ場は、給水システムのブースまたはコテージへの接続部分に接続されています(自律型dzherelタイプから削除される場合) 坑井穴..。 多くの種類の骨材では、水を汲み上げるときにバイコリスト機能も使用されます。 水供給それらにグリップが不足している場合、そしてバザンナの母親の場合にも、累積能力に予備があります。 家庭用および夏用コテージ用のポンプ場は、北方水の供給に容易に対応でき、国から汲み上げられる水を消費することができます。 安全なロボットシステムの確保を含むすべての操作、およびそれらの制御は、油圧衝撃のみを使用して、自動(またはほぼ自動)モードに変わります。 ドリル穴の掘削システムの上部に、ポンプ場が自動的に表面に配置されます。 ポンプで勝ち、リレーポンプとハイドロアキュムレータを備えたモノブロックに入れます。 水はグリップで上昇し、水がしきい値まで下がらなくなると、リレーが自動的にポンプをオンにしてサイクルを繰り返します。 ポンプ場を購入する前に、ハイドロアキュムレータを選択する次のステップに敬意を表します。 Yogo obsyagのドレッシングは、ドライバーの寿命のためであり、最適であるという罪を犯しています。これに対して、すべての場合にのみ、すべてのシステムのロボットの些細なことが保証されます。 カテゴリの近くには、ポンプ場のチャネルがあり、倉庫までは、固形物を捕捉するための特別なコンパートメントが含まれています。 優れた粒子や繊維の精製として機能する、ライイングメカニズムが組み込まれた特殊なポンプを使用する方が効率的です。
カントリーハウス..。 電力のポンプユニットのロボットロボットポンプユニットのモードを調整するための現代および外国のシステムでは、自動調整された電気駆動装置を使用する必要があります。 このようなシステムでは、万力のrіdiniはパラメータєによって規制されます。 現在の技術開発では、精度が高いため、タスクの猛攻撃が可能です。 ただし、精度は、ポンプユニットの電気モーターのラップアラウンドの周波数の変化によるものであり、ポンプユニットの場合は、ポンプユニットの一部の変化の兆候によるものです(弾性カップリングはモーターの前面に接続されています)。 その際、システムとレギュレーションの無感覚ゾーンを確立する必要があります。これにより、圧力安定化の精度が低下します。
給湯システムのポンプユニットの電気駆動を調整する方法は、次のような電気駆動のタイプの1つに転送されます。サイリスタブロックBO-3509以上のリビングルームからのポンプユニット(IMS)のインダクタ結合彼らへ; シリーズPLT、PChR-2 SAMI(Stromberg社)およびその他のタイプの周波数変換。 TDP-2とShDUの制御ステーションの変換に基づくAVK回路の電気駆動装置。 PCHVN、PCHVSを再変換するバルブ電気モーターに基づく電気駆動装置。
ラインの圧力が安定するのは、取水口を変更するとヘッジでの流量が減少し、ポンプの電気モーターの巻き取り頻度が変化するためです。規制システム。 水の消費量の増加に伴い、navpaki、裾のラインのグリップが低下し、ラッピングの頻度が増加しています。 安定化システムの主なメタは、与えられた変更に関する副の形で、現場のパイプラインのシステムの起源の副です。
花綱の圧力を安定させるシステムでは、流入量が増加したとき、または給水量が増加したときに追加の不規則なポンプを移送し、それが変化したときに接続する必要があります。
調整されたドライブは、最もフラットな特性を備えたほとんどのポンプユニットを装備するために使用されます。 同じタイプのシングルポンプの場合、それらには不感帯もあり、不規則なポンプの作動ホイールはそれらの直径に責任があり、調整にはあまり責任がありません。 調整されたポンプの直径とロボットが、ラッピングの周波数が調整可能な最大送りのモードで等しい場合(周波数電気駆動の場合)、モーター、調整された力で機器を完成させることができます。推奨事項。
明らかな圧倒に巻き込まれていないため、ポンプ設備では電気駆動装置はまだ拡張されていません。 ニーニはこの広い勝利者を求めることに同意しました。 州の技術の爆発的な開発により、電気駆動装置の必要な、時には安価な規制の静的な再開発に基づいた開発が可能になりました。 さらに、光エネルギー危機はエネルギー資源の有用性を示し、この合理的な活力の結果としてあなたが参加することを奨励しました。 長い間、ロボットは、自動調整された電気駆動装置を備えたポンプユニットの開発とステムを最後から拡張してきました。
このシステムは、非同期電気モーターを備えたポンプユニットのグループによる自動および手動操作用に設計されており、給水システムまたは水道本管の所定の水圧と技術進歩のレベルによる給水に使用できます。
ポンプ場による自動ケロバニアのシステムの可能性:
自動、手動 距離keruvannyaポンプユニット;
・皮膚管理オブジェクトのスタンに関するZbir情報。
・入力および出力magistrals、rivnivのパラメータの標準に関するZbir情報。
・自動、手動モード、およびディスパッチャによるリモートでのロックおよび調整フィッティングの制御。
・ディスパッチポイントの画面上のグラフィカルエディタからのオブジェクトのスタンに関する情報の表示。
・ロボットが自動モードの場合、血圧の監視はスキンポンプによって制御されます。
・ステーションには以下が提供されます。
・電力消費の経済性(50 ... 65%以上)と水の消費量の削減。
・花綱でのObmezhennyaスタートアップストラム。
・ポンプの電気モーターの資源の改善。
・Chergovyと修理要員の数を変更します。
ポンプ場でのVikoristannyaezhektoriv
頂点のポンプ場には、ジェット駆動のセンターポンプが装備されているビルトインまたはワイン栽培のエジェクターが装備されています。 ハリネズミktor--pristіy、1つの中間からの運動エネルギーの伝達が見られ、それは非常に速い速度から最後まで崩壊します。 エジェクター、pratsyuchi on 法律ベルヌーイ、中年の精神の衰退の結果として、ある中年のグリップを過剰な縮小の音に開き、最初の中年のエネルギーの動きを通して人が動いて見ることができるようにします。 最初のオプションは希望を生み出すことですが、同時に、グリビンを実際に保管するのに十分な量を与えることは素晴らしい蒸気を吸い込みます。 Vbudovanіezhektori、特に「golka」タイプのドリル穴のzruchnіは、帯水層ボールに地面に打ち込まれたパイプをschoєします。 別のオプションは、ポンプの種類自体を駆動するためのポンプ場です。プロテクターはポンプに駆動されませんが、ワインは、50メートル以上のグリビンに到達できる深い穴から水をうまく供給することができます。 本体が邪魔にならず、2本管エジェクターが下に下がります。 ほとんどの場合、給水システムは、道路の上部を大幅に視覚化したvikoristovuyutsyaに適しています。 Її不足-ドライブの妨害と時折低いKKDの前の重要性。
ポンプ場のvirobniksについて。
世界の有名なリーダーによって、彼らは約束とポンプ場、イタリアの会社マリーナとカルペダのパフォーマンスと機能性のために最高の価格を提供します。 交差点の前に、それは持ち込まれます:
・ 望み;
・ロボットのノイズレス。
・接続とvikoristannyaのシンプルさ。
・十分なモデル範囲。
・完全なセット;
・コンパクトさ;
・自動化のシンプルさと思慮深さ。
・ 可用性 効果的な参加 zahist;
・重要なモーターリソース。
ポンプ場の価格は、すべての可能性を規定することです。 ほとんどのバイヤーは次のシリーズを飲みます:
· セリアカム谷の新緑から9メートルまでの給水用。
· セリアAPM頂点およびグリビニから25mまでの給水用。
· シリーズIdromat Idromatレギュレーターに基づく自動システム
· シリーズBS。最大6台のポンプをオンにできるブースターステーション。
· セリアMINIMAT、TURBOMAT、CENTRIMATіGETTOMAT..。 膜タンクを備えた自動システム。
· EASYMATシリーズ..。 コンパクトなインストール。
ІМСに基づいて調整された電気駆動装置でポンプするためのポンプ場
VNDIVODGのロボットには、電力や電力の所有にかかる明らかなコストやその他の要因により、ポンプ場での調整された電気駆動装置を備えたACSの提供を支援します。 cichの実験的な改造は、モスクワのIvanivskiyポンプ場に持ち込まれました。 中央駅には、6つの球から設置された2つのポンプユニットにІМСが装備されており、連続して使用することができます。 ユニットの公称パラメータ:流量800 m3 /年(О、22 m3 / s)、たとえば33 m(О、33)、圧力160 kW、ラッピング周波数960 rpm、トルクІКС1、60 kNChm(160 kgf / m)。 調整された電気駆動装置なしで設備のロボットモードを調整することは、定期的なスイッチオンに接続されています:ポンプユニット。 スイッチオンの数は追加ごとに30〜40になり、作業ユニットの数は1から6まで変化しました。自動調整のシステムにより、1つまたは2つの調整済みユニットのラッピングの頻度と追加ユニットの数が変更されました。 ラッピングの周波数は、出力がその間のセットと等しいときに形成される出力の信号によって異なります。 PI法に従って発火する出力の信号は、IMSサイリスタウェイクアップコールのパルス位相制御システムの入力に送られます。 ティムは、明らかにポンプの電気モーターを包む頻度を自分で調整することになっています。 流量に変化があった場合、調整されたポンプのラッピングの頻度に変化があった場合、ポンプユニットの流量を変更する必要はなく、変更が必要です。 バックボーン駅の作業ユニット。 相互変調および不規則なユニットのブロックとして機能します。 ブロックは不規則なユニットからのスピンをオンにし、インジェクターはその時間のその瞬間にIKSをストラムの最大値(5 A)にブーストしました。ポンプのラッピングの頻度が調整されている場合、ポンプのラッピングの頻度が小さすぎると、回転シャッターがカールし始め、ポンプが引き戻されます。 調整ポンプの巻き付け頻度が最大値に達し、流入量が増え続け、貯水池からの排水に対応できない場合でも、ユニットに不規則なユニットが1つ追加され、量が変化します。追加のノイズ。 このシステムは、不規則なポンプユニットに接続された場合に、50 mmの精度と短時間の出力(最大350 mm)でポンプ場のタンク内のレベルの安定化を保証します。 このシステムでは、一度に1時間、場合によっては2単位のラッピングの頻度を調整できます。 1台のポンプの供給に対する信頼性のわずかな調整を伴うそのようなロボット操作のモードの必要性。 このようなシンクは、不安定な規制対象および非規制対象の骨材のロボットと平行しているため、規制対象の倉庫ユニットの設置は公称値の5〜10%にすぎません。 潮汐によって引き起こされる潮汐のわずかな変化は、調整されていないユニットのスイッチオンとスイッチオンを引きます。 もちろん、制御システムによって認識されることを期待していないため、水中には値があります。 ロボットの不安定なモードを防ぐために、2つの調整されたユニットのロボットに同期します。これは、1つのユニットの多大な努力のロボットに相当します。 規制システムの導入では、電気エネルギー消費の速度は約10%でした。 リックあたり170,000kWの場合、および追加ごとに30から3までのポンプユニットのスイッチオンの数。
SNUの効率を上げるために、追加された別館が確保されますが、調整可能なポンプユニットが許容できないほど低いKKDのゾーンに入る前に、作業ユニットの数が変更されます。 このようなアタッチメントはVNIIVODGEOで解体され、モスクワのポンプ場の1つに変わりました。 悪用の直後、IMCの必要性が非常に低いことを示したので、私たちは約束を真剣に使用しますが、リストの一番上に置く前に、幅広いアプリケーションにそれらを推奨することを許可しません。 さまざまなタイプの離散変換とアナログ変換を使用して、多数の制御システムがオブジェクトでテストされました。 ポンプ場の心の中では、最も圧倒的なものは、鳴っているベルの改訂に類似しているように見えました。
AVK回路に従って調整された電気駆動装置を備えたポンプ場
地下鉄モスクワ駅の近くでは、クンツェボポンプ場のSNUでの作業時間はわずかで、3〜4台のロボットを含む800kWの容量のポンプユニットが多数設置されていました。 自動制御システムは、負荷800 kW、ラップアラウンド周波数740 rpmのフェーズローターを備えた1つの非同期電気モーターから格納され、AVKを再加工し、バイソンユニットTDP2ZO4OO-Tの機能を格納できます。クロックリングと差圧ゲージから保存できるrivnyaを再変換するtaps3開始抵抗器。 PIレギュレーター。 タンク内のラインを7〜10 cmの精度で安定させるシステム。ラインの安定化の精度により、電気モーターをポンプに接続する弾性カップリングの指が摩耗しました。 タンク内のラインの蓄積の損耗を考慮して(hviliの高さはそれぞれ20 cm)、ACSの無感覚ゾーンが減少し、レベルの安定化の精度が低下します。 周波数を調整し、ユニットを包むためのシステムの原理は、食品の説明に類似しています。 ステーションで動作するポンプユニットの数の変更は、運用担当者によって提供されます。 ポンプ設備zaoshchadzhuchorіchno600700千の中央システムのVikoristannya。 kWh /年の電力、このランクはエネルギー供給の約4-5%です。
Dodatkovі首都vitrati、zoomsuvannyaシステムとポンプ設備の規制は、15イチイを預けました。 こする。 ポンプユニットの調整は最大5000年間続きます。
デンマークでは、1台のポンプに同じタイプの調整された電気駆動装置を装備することにより、ロボット制御システムの効率の向上と調整されたポンプユニットの摩耗の減少が達成されました。
周波数電気駆動装置を備えたポンプ場
ポンプ場Mosvokbud(モスクワメトロ駅)では、PSHTの変換、NDI KHEMZの故障により、110 kW /年の容量のポンプの非同期電気モーターの非常に短絡があります。 電気駆動装置の制御システムは、超音波リヴネミールVIDLUNNYA3がビコリスタニーシステムに変換されたという事実のせいで、前述のものと同様に促されます。 ts_y設備のZasosuvannya周波数電気駆動装置は、電力の節約を6万回変更します。 kW-ピクあたりの年(含む) 約5%。
地下鉄モスクワ駅のポンプ場では、PChR-2タイプと金融会社Strombergへの周波数変換も行われており、これに基づいて、最大75kWのポンプ場の運転を自動調整する10のシステムがあります。インストールされています。 ストロンバーグ社によるSAMIタイプの周波数変換による制御システムは、ノボナガチンスキー駅での運用にわずか1時間かかり、エネルギー経済の7〜8%を節約します。
ストロンバーグからの変換の頻度は、ポンプユニットの調整に関して信頼性が高くコンパクトです。 rivnomirnyポンプ骨材の安全性のために、それはアタッチメントに移され、悪臭の助けを借りて、1回の書き換えまで続くことができます。
周波数の変化率が低下した結果、ハリコフ岬でPShTのタイプが変更され、レニングラード岬とでEKTのタイプが変更されました。
バルブ電気モーターをベースにしたドライブを備えたポンプステーション
ポンプ場電気駆動
モスクワのフィリオフスキーポンプ場には、バルブ電気モーターをベースにした電気駆動装置を備えたACSが設置されました。 ステーションに設置された30-FV-17ブランドの3つの6つのポンプ、そのうちの1つは、NDIKHEMZによって分解されたPChVNリワークマシンのストレージからのそのような電気ドライブを備えています。 電気駆動装置の需要は1600kWで、モーターの圧力は10kWです。 4000 kWhの容量を持つ乾式下向き変圧器を介した電力供給への接続の再構築、およびdvigun-同じ変圧器を介した再接続。 再加工の倉庫の前に、システムと同期電動機のサイリスタの再加工がありますが、これは電気駆動装置が取り付けられている場合は変更されません。 ポンプの電気駆動によるケルバニヤのシステムは、説明の説明に類似しています。 ヤクセンサーrіvnyavikoristaniy ウィンク出力が0〜5mAのこの差圧計。 keruvannya vikoristanyのシステムには、P-17タイプのPIレギュレーターがあります。 調整された電気駆動装置を備えたZasosuvannyaACSは、電気代を約1200イチイ削減しました。 kW-yearは、ポンプ装置の操作の心を減らし、ロボットと操作要員の心を失いました。 ロボットACSを分析して電源を表示しますが、別のポンプユニットの類似の電気駆動装置を所有することで、電源の経済性を高めることができました。 ステーションでは、アタッチメントの調整が行われ、低KKDのゾーンで調整されているポンプロボットがオンになります。
Allbest.ruに投稿
...その他のドキュメント
未使用の廃水を汲み上げるためのVikoristannyaポンプ場、virobnicheskih施設の近くまたはブロック内に立つプロジェクト。 ドビル追加所持。 技術-経済的なrozrakhunki、安全の技術。
ロボットコース、追加2014年9月1日
Vykhіdnіdanіshodotekhnologicheskogorozrakhunkunaphtaパイプライン。 パイプ鋼の機械的特性 ループステーションとポンプステーションのないパイプラインの特性。 ルートのプロファイル上のポンプ場の配置。
ロボットコース、追加2014年3月4日
周波数変換のurahuvannyaによって促されたポンプ場の制御システムの開発。 同じ機械的特性の電気モーターのRozrahunok。 周波数の振動と再変換。 経済的効果は、提案された解決策の回収の期間です。
ロボットの卒業証書、寄付2012年8月1日
ポンプおよび発電所は、給水および給水システムの主要な電力線です。 Rozrakhunokロボットポンプ場モード。 国営のポンプポンプのブランドのVibir。 ポンプ場の構成、追加所持の振動。
コースロボット、追加2012年12月16日
改善ステーションの主な目的はデザインです。 ポンプ場の特徴。 ダニ、プロジェクトの基礎を築きました。 大学の建設的な説明はsporudです。 ハイドロメカニカルでエネルギッシュな所持のバイビル。
ロボットの制御、2012年11月30日に追加
ナフサファミリーの開発と開発を強化します。 Lowenskiy家のsverdlovinsの製品の収集と輸送。 ブースターポンプ場を適用するには、技術スキームが重要です。 断面速度ポンプの原理。
ロボットコース、追加2016年3月27日
主要なガスおよび石油パイプラインの設計、主要なパイプラインルートの振動。 集中型の異なるポンプユニットからのコンプレッサーステーションの技術図。 Spilnaロボットポンプ場とナフサパイプラインのライン部分。
ロボットコース、追加2016年5月17日
ナフサポンプ場と補償器の設計の特徴。 接続の変更と所有権の主な理由は、選択によるものです。 ユニバーサルベローズタイプのレンズコンペンセータのポンプ接続に導入されたエントリの分散と変動の低減。
ロボットの卒業証書、追加2017年5月16日
現在の心の中の吸盤ロッドポンプ掘削リグ(吸盤ロッドポンプユニット)の分析。 SHSNU、rozrahunok、pidbir所持の管理スキーム。 Sverdlovinnyロッドポンプ、їх指定は吸引の領域であり、これを強くお勧めします。 吸盤ロッドの特徴。
ロボットの制御、追加2016年1月19日
ガス発生所(GDS)の分類。 ロボット工学GDSの原理は、個別の設計です。 ブロックコンプリートGDSブランドBK-GRS-I-30および自動GDSブランドAGRS-10の技術図。 ガス火力発電所の所有の種類。


