แผนการบรรยาย
1. จากเบื้องหลัง
2. งานพื้นฐานของระบบอัตโนมัติในการติดตั้งระบบระบายน้ำ
3. อุปกรณ์อุตสาหกรรมสำหรับการจ่ายน้ำอัตโนมัติ
4. ระบบควบคุมปั๊มแบบปรับความถี่ได้
5. เซ็นเซอร์และรีเลย์ระบบน้ำอัตโนมัติแบบพิเศษ
7.1 มุมมองที่เป็นความลับ
ปั๊มเป็นอุปกรณ์ที่ทำหน้าที่เคลื่อนที่ด้วยแรงดัน (การใช้มอเตอร์ การสูบน้ำ) ของของไหลอันเป็นผลมาจากพลังงานที่ถ่ายโอน ปั๊มจะแปลงพลังงานกลของมอเตอร์เป็นพลังงานของหน่วยเคลื่อนที่ที่จะเคลื่อนตัวรอง ตามลักษณะเฉพาะของเครื่องสูบน้ำแบ่งออกเป็นกลุ่มต่อไปนี้:
โรงงานบำบัดน้ำเสียของเราจะกู้คืนของเสียโดยเฉลี่ยประมาณ 50 ล้านแกลลอนต่อวัน และสามารถเข้าถึงได้สูงสุด ความจุของอาคารที่ 220 ล้านบาร์เรลต่ออุปทาน เรายังดำเนินการระบบการรวบรวมที่เชื่อถือได้ น้ำเสียและสถานีกำจัดน้ำเสียระยะไกล
ที่นี่ แรงโน้มถ่วงจะถ่ายเทพื้นที่น้ำเสียจากกระแสไปยังบ่อบำบัดของเรา และสำหรับแปลงน้ำลึก สถานีสูบน้ำหรือสถานีสูบน้ำจะต้องขนส่งน้ำเสียไปยังท่อ Ibni ที่ใหญ่กว่า เราควบคุมสถานีสูบน้ำเสียจากผิวหนังและสถานียกน้ำเสียจากระยะไกลเพื่อให้แน่ใจว่าการทำงานปกติ หากไม่เป็นเช่นนั้น เราจะปฏิเสธสัญญาณเตือนในห้องควบคุมกลางของเราที่โรงบำบัด ข้อมูลอื่นๆ ที่ได้รับการตรวจสอบจากระยะไกล ได้แก่ ความเร็วของปั๊ม จำนวนการสตาร์ทและชิ้นส่วนของปั๊ม และชั่วโมงการทำงานของปั๊ม
น้ำประปาเทศบาลและอุตสาหกรรม
กองขยะสำหรับส่งน้ำหรือน้ำมันจากหลุมเจาะ
การไหลเวียน;
เพื่อชีวิต;
ระบายน้ำ;
เพื่อการขนส่งน้ำมันและวัสดุอื่นๆ
ตามกฎแล้วปั๊มทำงานในโหมด trival , ตามกฎแล้วแม่น้ำมีอายุหลายปี ความตึงบนเพลามอเตอร์ขับเคลื่อนเป็นปกติโดยไม่ต้องเปลี่ยนตำแหน่ง วิธีที่ละเอียดที่สุดในการควบคุมการจ่ายปั๊มคือการเปลี่ยนความถี่การหมุนของเครื่องยนต์ซึ่งมีช่วงน้อย จำเป็นต้องมีกฎระเบียบที่กว้างขึ้นเฉพาะในกรณีที่รุนแรงเท่านั้น
เมื่อเร็วๆ นี้เราได้ติดตั้งองค์ประกอบควบคุมใหม่บนส่วนหนึ่งของสถานีสูบน้ำ เราได้สร้างระบบสวิตช์ฉุกเฉินอัตโนมัติสำหรับสถานีสูบน้ำแห่งนี้ เมื่อเร็วๆ นี้ เรายังพัฒนาหน่วยตรวจวัดทางไกลระยะไกลที่ทำงานและตรวจสอบสถานีบำบัดน้ำเสียระยะไกลของเราอีกด้วย
การปรับปรุงชุดควบคุมสถานีสูบน้ำให้ทันสมัย
ส่วนสถานีสูบน้ำซึ่งเราได้อัพเกรดด้วยระบบสวิตชิ่งฉุกเฉินอัตโนมัติ ประกอบด้วยปั๊มที่มีความเร็วคงที่สองตัวที่ทำงานตลอดแนวท่อทั้งหมด หน่วยควบคุมของสถานีสูบน้ำจะตรวจสอบและควบคุมการไหลของน้ำในอ่างเก็บน้ำหรือบ่อน้ำ ตัวควบคุมสตาร์ทและสตาร์ทปั๊มตามระดับที่ระบุสำหรับปั๊ม นอกจากนี้ยังจะส่งสัญญาณเตือนระดับสูงและต่ำ ระบุว่าองค์ประกอบควบคุมปั๊มอยู่ในโหมด "แมนนวล" หรือ "อัตโนมัติ" และระบุว่าโอเวอร์โหลดรีเลย์เปิดใช้งานอยู่หรือไม่
ในการขับเคลื่อนปั๊มรวมถึงการใช้ร่วมกับพัดลม โดยไม่คำนึงถึงแนวโน้มที่ชัดเจนต่อช่วงไดรฟ์ไฟฟ้าควบคุมตัวแปรที่กว้างขึ้น ไดรฟ์ที่ไม่มีการควบคุมจะขาดจากไดรฟ์หลัก ชุดขับที่กว้างที่สุดเท่าที่จะเป็นไปได้คือชุดขับที่มีมอเตอร์อะซิงโครนัสลัดวงจร ที่โหลดมากกว่า 300 kW มอเตอร์ซิงโครนัสจะหยุดทำงานกับมอเตอร์กรงกระรอก หากจำเป็นต้องเร่งความเร็วหรือสตาร์ทไอพ่นเมื่อสตาร์ท จะใช้มอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์แบบพันแผล การควบคุมของไดรฟ์ไฟฟ้าจะซบเซาในสถานการณ์เหล่านี้ หากจำเป็นต้องเปลี่ยนประสิทธิภาพการสูบน้ำบ่อยครั้งภายในช่วงกว้าง เช่น สำหรับปั๊มของระบบจ่ายน้ำ และหากการสูบน้ำต้องมีการควบคุมประสิทธิภาพการผลิตแบบอัตโนมัติด้วยการเพิ่มก็สามารถทำได้อย่างเต็มที่ มีการควบคุม (ปั๊มหมุนเวียนและปั๊มชีวิต)
โปรแกรมควบคุมหน่วยของสถานีสูบน้ำเพื่อกำหนดว่าปั๊มตัวใดเริ่มทำงานก่อน เพื่อกระจายชั่วโมงการทำงานของปั๊มอย่างเท่าๆ กัน นอกจากนี้ยังสามารถตั้งโปรแกรมให้ปั๊มอื่นเริ่มทำงานได้เนื่องจากปั๊มตัวแรกไม่สามารถให้การไหลของของเสียเพียงพอที่จะรักษาน้ำให้อยู่ในช่วงที่ยอมรับได้
คุณลักษณะความมีชีวิตช่วยให้สถานีทำงานได้ตามปกติจนกว่าการซ่อมแซมจะแล้วเสร็จในช่วงเวลาทำการปกติ สำหรับการทำงานของผิวหนัง จะใช้หน้าสัมผัสหนึ่งคู่ ชิ้นส่วนดังกล่าวอาจอยู่ในมือของเราไม่กี่วันหลังจากข้อตกลง และเราสามารถพัฒนาระบบเหล่านี้ได้อย่างรวดเร็ว
หน่วยสูบน้ำมักจะรวมกันอยู่ในสถานีสูบน้ำ โดยที่ปั๊มจำนวนหนึ่งทำงานขนานกันบนรางเดียว
ปั๊มหลายตัวที่หยุดทำงานไม่จำเป็นต้องมีการควบคุมการไหล: ปั๊มแห้ง ปั๊มหลักสำหรับน้ำ การติดตั้งเครื่องสูบน้ำสำหรับเหมืองและเหมืองแร่ส่วนใหญ่ ฯลฯ ดังนั้นจึงใช้มอเตอร์แบบอะซิงโครนัสหรือซิงโครนัส (สำหรับการใช้งานที่สูงกว่า 300 กิโลวัตต์) ซึ่งควบคุมโดยสตาร์ตเตอร์แม่เหล็ก
แผนผังการควบคุมการชาร์จของสถานีสูบน้ำ
เจ้าหน้าที่ที่รับผิดชอบดูแลสถานีโทรหาฉันหลายครั้งในตอนเย็นและวันหยุดสุดสัปดาห์เพื่อขอให้ฉันดูสถานที่นั้น อย่างไรก็ตาม ความล่าช้าในการเชื่อมต่อที่เราสัมผัสได้ผ่านการเชื่อมต่ออินเทอร์เน็ตทำให้เรามองหาวิธีการเชื่อมต่ออื่น
ผู้จัดจำหน่ายไฟฟ้าในพื้นที่ของเราใช้บริการอินเทอร์เน็ตแบบออปติคัลซึ่งเราเชื่อว่ามีความสำคัญอย่างยิ่งในการแก้ปัญหานี้ ขณะนี้เรากำลังประเมินไซต์งานเพื่อค้นหาผู้สมัครที่ดีสำหรับโครงการนำร่องที่ใช้ยางคุณภาพสูงคุณภาพสูง
7.2 งานพื้นฐานของระบบอัตโนมัติในการติดตั้งระบบระบายน้ำ
ปัญหาที่พบในระบบอัตโนมัติของการติดตั้งระบายน้ำของ ATK ต่างๆ ตามกฎแล้วจะคล้ายกันหรือใกล้เคียงกับข้อกำหนดหลัก ในการเชื่อมต่อกับสิ่งนี้เราจะแสดงการไหลของงานหลักของระบบอัตโนมัติในกระบวนการสูบน้ำจากเหมืองและขุด
งานระบบอัตโนมัติหลักสำหรับกระบวนการสูบน้ำจากเหมืองคือ:
ความทันสมัยของระบบ varto zusil
หน่วยสถานีสูบน้ำใหม่มีความน่าเชื่อถือมากกว่าระบบควบคุมเดิม เราไม่มีบันทึกที่เจาะจงเกี่ยวกับจำนวนครั้งในการส่งบุคลากรปฏิบัติการไปยังไซต์งานในอดีต หรือจำนวนครั้งที่จำเป็นต้องใช้แหล่งจ่ายไฟหลังจากผ่านไปหลายปี
แม้ว่าเราจะประท้วงอย่างรุนแรง แต่เรายังไม่มีสถานการณ์ที่จำเป็นต้องใช้ฟังก์ชันการสลับอัตโนมัติหลังจากเกิดความล้มเหลว เพราะมันสวมมงกุฎให้เราเพียงครั้งเดียว มันจึงทำให้เราเสียค่าใช้จ่ายมาก ฮาร์ดแวร์เป็นแบบโมดูลาร์ ดังนั้นเราจึงไม่จำเป็นต้องซื้อเกินความจำเป็น หากคุณพิจารณาว่าเรามีไซต์ระยะไกลมากกว่า 80 แห่ง การประหยัดก็จะเพิ่มขึ้นอย่างรวดเร็ว
- รับประกันการทำงานปกติของระบบน้ำประปาโดยไม่ต้องมีเจ้าหน้าที่บริการอยู่ตลอดเวลา
- การสตาร์ทและการสตาร์ทเครื่องสูบน้ำเพื่อรักษาระดับน้ำในถังเก็บน้ำให้อยู่ในความสามารถในการควบคุม
- การสูบน้ำอัตโนมัติของหน่วยสูบน้ำ
- หุ่นยนต์ควบคุมด้วยมือของหน่วยสูบน้ำ
– เปิดโดยอัตโนมัติหน่วยสูบน้ำสำรองในกรณีที่ทำงานผิดปกติ การเชื่อมต่ออัตโนมัติปราศยุวาลี;
ส่วนแรกอธิบายถึงเป้าหมายและการเปลี่ยนแปลงที่ต้องนำมาพิจารณาเมื่อออกแบบ เพื่อน - พื้นฐานทางทฤษฎี,จำเป็นสำหรับการทำความเข้าใจการออกแบบ เมื่อพิจารณาถึงสถานีที่เสริมกำลังสถานีสูบน้ำเหล่านี้ จำเป็นต้องสร้างการเชื่อมต่ออินทราเน็ตเพื่อให้สามารถประสานงานระหว่างสถานีได้ และในขณะเดียวกันก็ช่วยเพิ่มปริมาณงานของอาคารที่ควบคุมกระบวนการ
ตามภูมิศาสตร์ ในหลาย ๆ สถานการณ์ เพื่อตอบสนองความต้องการนี้ จึงจำเป็นต้องใช้การติดตั้งเครื่องสูบน้ำ ณ จุดนี้ วิศวกรอิเล็กทรอนิกส์สามารถเข้ามาแทรกแซงเพื่อเพิ่มประสิทธิภาพกระบวนการนี้ได้ การออกแบบที่มีอยู่ในหุ่นยนต์นี้สามารถประกอบเข้ากับหน่วยสูบน้ำทุกประเภท และไม่เพียงแต่กับน้ำดื่มเท่านั้น แต่ยังสามารถปรับให้เข้ากับสถานีสูบน้ำต่างๆ ได้อีกด้วย ความสามารถในการปรับตัวนี้ถูกจำกัดด้วยความแข็งแกร่งของมอเตอร์สามเฟสเท่านั้น สำหรับกาลัสประเภทใดประเภทหนึ่ง ระบบติดตามสามารถช่วยประหยัดเวลาได้มากและเพิ่มประสิทธิภาพของกระบวนการได้อย่างมาก
- ความเป็นไปได้ของความเมื่อยล้าของวิธีการเติมต่างๆ: แบตเตอรี่ถัง; จากความเมื่อยล้า ปั๊มบ่อหรือห้องด้านหลัง จากท่อระบายน้ำ ด้วยวิธีปั๊มและกาลักน้ำเพิ่มเติม
- ปริมาณการเติมต่อชั่วโมง
- เปลี่ยนจากการควบคุมอัตโนมัติเป็นการควบคุมด้วยตนเอง
นอกจากนี้ ระบบอัตโนมัติสำหรับกระบวนการสูบน้ำต้องมั่นใจ:
คุณสามารถลดจำนวนชั่วโมงที่ผู้ปฏิบัติงานต้องใช้ในการติดตามกระบวนการได้ จริงๆ แล้วการตรวจสอบเครื่องจักรก็เพียงพอแล้ว สถานีสูบน้ำที่สำนักงานงานศพ โดฟคิลลาและแม่ของผู้ปฏิบัติงานหรือผู้ช่วยเท่านั้น รับรองได้เลยว่าจะมีน้ำในถังในอนาคต
เป็นที่ชัดเจนว่าต้องครอบคลุมฟังก์ชันเหล่านี้ให้ซับซ้อนและเรียบง่ายเท่าที่ระบบสามารถทำได้ เนื่องจากฟังก์ชันเหล่านี้ถูกกำหนดโดยประเภทของระบบที่จะควบคุม และส่วนประกอบในการจัดเก็บ เช่น สวิตช์ รีเลย์ และตัวควบคุมนาฬิกา ควบคุมฟังก์ชันต่างๆ เช่น การสตาร์ท การเร่งความเร็ว การควบคุมความเร็ว การควบคุมแรงดึง การปล่อย การผกผัน และการหน่วงเวลา นี่เป็นเพราะการควบคุมด้วยตนเอง ดังนั้นผู้ปฏิบัติงานจึงต้องเลื่อนสวิตช์หรือกดปุ่มเพื่อให้เกิดการเปลี่ยนแปลงในจิตใจการทำงานของเครื่องจักรหรือระบบ
- การควบคุมท้องถิ่น (ด้วยตนเอง) ของหน่วยใกล้เคียงสำหรับการบดและซ่อมแซมหุ่นยนต์
- การควบคุมหน่วยสูบน้ำจำนวนเท่าใดก็ได้โดยไม่รบกวนการทำงานของหน่วยอื่นในโหมดอัตโนมัติ
- ปั๊มที่ผิดปกติซึ่งมีผลผลิตลดลงหรือสูญเสียไป, แบริ่งร้อนเกินไป, แรงดันไฟฟ้าต่ำในเชือกเส้นเล็กควบคุม, ไฟฟ้าลัดวงจร
รูปที่ 1 แสดงวิธีการทำงานของการควบคุมประเภทนี้ เพื่อให้ผู้ควบคุมเครื่องอยู่ที่นั่น ตำแหน่งที่สตาร์ทเตอร์อยู่ เพื่อให้สามารถปรับเครื่องยนต์ได้ Malyunok 1 มอเตอร์ไฟฟ้าควบคุมด้วยตนเอง รูปภาพขนาดเล็ก 2 แสดงการควบคุมอัตโนมัติ ซึ่งผู้ควบคุมปุ่มตั้งอยู่ตรงนั้น และตำแหน่งที่ปุ่มต่างๆ อยู่
เล็ก
2 ควบคุมมอเตอร์ไฟฟ้าอัตโนมัติ การประมวลผลเบื้องต้นจะเป็นไปโดยอัตโนมัติ แต่คุณอาจต้องพึ่งพาการทำงานแบบแมนนวลบนแผงปุ่มหรือสวิตช์ ดังนั้นหากโครงการประกอบด้วยอุปกรณ์อัตโนมัติหนึ่งหรือหลายเครื่อง อุปกรณ์นั้นจะถูกจัดประเภทเป็นอุปกรณ์อัตโนมัติ ระบบควบคุมนี้จะเปิดใช้งานปุ่มต่างๆ ในช่วงเวลาที่เหมาะสม และวงจรจะปิดโดยอัตโนมัติ ตราบใดที่หอกปิดอยู่ จะช่วยให้สตาร์ทเตอร์แม่เหล็กไฟฟ้าเริ่มทำงานและสตาร์ทเครื่องยนต์ได้
- การปิดกั้นซึ่งรวมถึงความเป็นไปได้ของ: การสตาร์ทชุดปั๊มเมื่อปั๊มไม่ท่วม, การเปิดมอเตอร์ขับเคลื่อนของปั๊มก่อนสตาร์ทชุดปั๊ม, การหยุดชุดปั๊มจนกระทั่งปั๊มปิดสนิท, การเปิดปั๊มจากระยะไกล เมื่อไม่มีน้ำในถังเก็บน้ำ ให้รีสตาร์ทฉุกเฉินโดยเชื่อมต่อปั๊มจนกว่าจะระบุสาเหตุของการปิดระบบฉุกเฉิน
งานพื้นฐานของระบบอัตโนมัติในการติดตั้งระบบระบายน้ำ
Malyunok 3 ควบคุมมอเตอร์ไฟฟ้าอัตโนมัติ ซึ่งหมายความว่าการเขียนโปรแกรมของตัวควบคุมลอจิคัลขนาดใหญ่ที่ออกแบบมาเพื่อควบคุมกระบวนการล่าสุดแบบเรียลไทม์ การควบคุมและการเขียนโปรแกรมสามารถดำเนินการโดยบุคลากรที่มีการตรวจสอบทางไฟฟ้าหรืออิเล็กทรอนิกส์โดยไม่ต้องมีความรู้เกี่ยวกับคอมพิวเตอร์ นอกจากนี้ยังถือได้ว่าเป็นกล่องดำซึ่งมีเทอร์มินัลอินพุตซึ่งเชื่อมต่อปุ่มตัวตรวจจับและเทอร์มินัลเอาต์พุตซึ่งเชื่อมต่อคอยล์คอนแทคเตอร์วาล์วไฟฟ้าหลอดไฟ ฯลฯ ดังนั้น หุ่นยนต์จะยังคงอยู่ในสัญญาณอินพุตที่เปิดใช้งานอยู่ทุกขณะเมื่อใดก็ตามที่โปรแกรมถูกบันทึก
- การควบคุมประสิทธิภาพการทำงานของปั๊ม ความร้อนสูงเกินไปของตลับลูกปืน และตำแหน่งของโหลด
- สัญญาณเตือน: ในห้องจ่ายน้ำ - เกี่ยวกับการปิดฉุกเฉินของชุดสูบน้ำและเกี่ยวกับการมีแรงดันไฟฟ้าในหอกควบคุม ที่จุดควบคุมกลางของเหมือง - เกี่ยวกับการทำงานของหน่วยสูบน้ำ (svitlov), เกี่ยวกับการปิดฉุกเฉินของหน่วยสูบน้ำ (สัญญาณขัดข้อง), การไหลของน้ำฉุกเฉินเข้าสู่ตัวเก็บน้ำ, ความผิดปกติของหอกสัญญาณ (เสียงและแสง) และเกี่ยวกับ แรงดันไฟฟ้าในวาล์วควบคุม
องค์ประกอบแบบดั้งเดิมที่มีรีเลย์ การบล็อก เวลา ฯลฯ เพิ่มเติม - ภายใน ในความเป็นจริง งานของคอนโทรลเลอร์ขึ้นอยู่กับการเชื่อมต่อของโปรแกรมที่สร้างการโต้ตอบระหว่างสัญญาณอินพุตที่ต้องเชื่อมต่อเพื่อเปิดใช้งานเอาต์พุตจากโปรแกรมที่เกี่ยวข้อง
การปรับเปลี่ยนโปรแกรมและการแก้ไข สำหรับวงจรแบบมีสายแบบเดิม การเปลี่ยนแปลงใดๆ ก็ตามจะใช้เวลานาน ดังนั้นเพื่อทำการเปลี่ยนแปลงนี้ จึงจำเป็นต้องปรับปรุงแผงควบคุมใหม่ ความก้าวหน้าทางเทคโนโลยีที่มีต้นทุนต่ำส่งผลให้ฟังก์ชันต่างๆ เพิ่มขึ้นในหน่วยขนาดเล็กและราคาถูกมากขึ้น ความเร็วในการทำงาน รีเลย์แบบเดิมอาจใช้เวลาประมาณหนึ่งชั่วโมง ความน่าเชื่อถือ โดยทั่วไป อุปกรณ์โซลิดสเตตมีความน่าเชื่อถือมากกว่ารีเลย์และตัวจับเวลาระบบเครื่องกลไฟฟ้า
โดยไม่คำนึงถึงรูปแบบทางเทคโนโลยีของการจัดหาน้ำ ห้องนอนระบบอัตโนมัติของการติดตั้งระบบระบายน้ำ:
- การกำกับดูแลบุคลากรบริการ
- เพิ่มความน่าเชื่อถือและความปลอดภัยของงานไฮดรอลิก
- รับประกันโหมดการทำงานที่เหมาะสมที่สุดของปั๊มเพื่อควบคุมประสิทธิภาพการผลิต
จากมุมมองของการควบคุมและประสิทธิภาพทางเศรษฐกิจ กระบวนการของระบบอัตโนมัติของการติดตั้งระบายน้ำใน SRSR ได้รับการพัฒนาในสองขั้นตอน:
สร้างรูปภาพของบันทึก เนื่องจากโปรแกรม koristuvach ไม่จำเป็นต้องเข้าถึงบันทึกเหล่านี้ทันที สถานะที่อัปเดตของเอาต์พุตจะสอดคล้องกับรูปภาพที่ถ่ายเมื่อสิ้นสุดรอบของโปรแกรมแสดงภาพ อินพุตมีสองประเภท: อินพุตดิจิตอล, อินพุตอะนาล็อก, อินพุตดิจิตอล
การสร้างใหม่นี้ขึ้นอยู่กับความแม่นยำของเพลง การอนุญาต และทุกช่วงเพลงของชั่วโมง โมดูลอินพุตแบบอะนาล็อกสามารถอ่านแรงดันไฟฟ้าหรือสตริงได้ เอาต์พุตมีสองประเภท: เอาต์พุตดิจิทัล โมดูลเอาท์พุตแบบสถิต เมื่อจ่ายแรงดันไฟฟ้า สามารถทำงานได้เฉพาะกับองค์ประกอบที่ทำงานบนแรงดันไฟฟ้าเดียวกันเท่านั้น และโมดูลเอาท์พุตระบบเครื่องกลไฟฟ้าที่มีแรงดันไฟฟ้าต่างกันสามารถทำงานบนองค์ประกอบที่ทำงานภายใต้แรงดันไฟฟ้าที่แตกต่างกัน แรงดันไฟฟ้าหรือแหล่งจ่ายไฟนี้สามารถทำหน้าที่เป็นส่วนประกอบควบคุมสำหรับกลไกทางกลที่ได้รับการควบคุมแบบอะนาล็อก ตัวอย่างเช่น ตัวแปรผันของไหล ตัวควบคุมไทริสเตอร์ของเตาเผา และเครื่องควบคุมอุณหภูมิ
ขั้นตอนแรก - ระบบอัตโนมัติของกระบวนการสตาร์ทและสตาร์ทปั๊มในการทำงานของระดับน้ำในตัวรวบรวมน้ำ
อีกขั้นตอนหนึ่งคือการสูบน้ำอัตโนมัติเพื่อให้แน่ใจว่าการติดตั้งเครื่องสูบน้ำมีโหมดการทำงานที่เหมาะสมที่สุด
ประสิทธิภาพเชิงประหยัดของขั้นตอนแรกของระบบอัตโนมัติจะได้รับการรับรองโดยเจ้าหน้าที่บริการที่ทุ่มเท ในอีกขั้นหนึ่งของการทำงานอัตโนมัติ บรรลุประสิทธิภาพ:
สัญญาณอะนาล็อกผ่านกระบวนการปรับตัวที่ยอดเยี่ยมทั้งในโมดูลอินพุตและในโมดูลเอาต์พุต บล็อกหรือคอนโซลการเขียนโปรแกรม: เลือกอุปกรณ์ ฮาร์ดแวร์ และซอฟต์แวร์ที่จะให้โปรแกรมป้อนและระบุลำดับคำสั่งที่ประกอบเป็นโปรแกรมแพ็คเกจ ในลักษณะนี้ พวกเขาจะไม่เกี่ยวข้องโดยตรงกับการเตรียมการหรือการดำเนินการของโปรแกรม
ปรึกษาโปรแกรมสำหรับรายละเอียดที่บันทึกไว้ในภาพที่นำเข้าและเมื่อสร้างภาพที่ส่งออก โครงสร้างของมันคล้ายกัน เนื่องจากใช้วงจรควบคุมที่มีลอจิกแบบมีสาย ดังนั้นการตรวจจับแบบเดียวกันของหน้าสัมผัสแบบเปิดและแบบปิดแบบปกติ โดยมีความแตกต่างกัน การตีความจึงแตกต่างอย่างสิ้นเชิง Baby 6 แสดงการเขียนโปรแกรมโดยผู้ติดต่อ
ก) ทำให้วงจรจ่ายน้ำไฮดรอลิกและไฟฟ้าง่ายขึ้น ดังนั้นจึงไม่จำเป็นต้องตั้งโปรแกรมระบบน้ำท่วมและอุปกรณ์พับ
b) ลดความสามารถในการรวบรวมน้ำลง 30-50%;
c) ลดกำลังของมอเตอร์ไฟฟ้าและประสิทธิภาพของปั๊มลง 35-75%
d) เพิ่มความน่าเชื่อถือของการติดตั้งเครื่องสูบน้ำเป็นที่ชัดเจนว่าประมาณ 80% ของปัญหาทั้งหมดเกิดขึ้นในขณะที่ปั๊มเริ่มทำงาน
จ) ลดค่าใช้จ่ายในการดัดแปลงปั๊มเพื่อเพิ่มพื้นที่การทำงานของปั๊มอุตสาหกรรม
ในสหภาพโซเวียตความเคารพหลักคือขั้นตอนแรกของระบบอัตโนมัติ แน่นอนว่าก่อนขั้นตอนแรกของระบบอัตโนมัติ อุปกรณ์ควบคุมจะต้องมีการควบคุมสามประเภท: อัตโนมัติ แบบท้องถิ่น (ในตู้เก็บน้ำ) และระยะไกล (จากผู้มอบหมายงาน)
เลื่อนไปโค้งงอในหินที่เหลือของนักว่ายน้ำในบัญชีรายชื่อแรงดันไฟฟ้าของการกู้คืนอัตโนมัติของปั๊มน้ำในกฎหมาย (บิลช์ถูกเย็บไปไกลจากZarubіzhzhi) จามรีนั้นหยิ่งใน Vishisch มันสับสนโดย แม่น้ำวิกตอเรียที่มีระบบไฟฟ้าแบบอะซิงโครนัสความถี่ภูมิภาค ในกรณีนี้ ความตึงของเครื่องยนต์จะถูกเลือกจากการขยายอัตราการไหลสูงสุดที่เป็นไปได้ เพื่อให้แน่ใจว่าระบบขับเคลื่อนจะมีแรงดันสูงสุดที่เป็นไปได้ ดังนั้นเมื่อมีกระแสน้ำปานกลางและต่ำเครื่องยนต์จะขาดกำลังอย่างชัดเจนซึ่งจะได้รับการชดเชยโดยการเปลี่ยนกำลังของไหลและผลที่ตามมาคือการเปลี่ยนแปลงของความตึงและความตึงของไดรฟ์ไฟฟ้า คุณ
7.3 อุปกรณ์อุตสาหกรรมสำหรับการจ่ายน้ำอัตโนมัติ
สำหรับการควบคุมการติดตั้งระบายน้ำอัตโนมัติ มีอุปกรณ์ดังต่อไปนี้:
AVO-3 สำหรับการติดตั้งที่ติดตั้งปั๊มหนึ่งตัวพร้อมมอเตอร์แบบอะซิงโครนัสกรงกระรอกสูงถึง 120 kW
UAV สำหรับการติดตั้งที่ติดตั้งปั๊มที่มีมอเตอร์ไฟฟ้าลัดวงจรแบบอะซิงโครนัสแรงดันสูงและแรงดันต่ำ อุปกรณ์ UAV ได้รับการรวมเป็นหนึ่งเดียวและได้รับการติดตั้งตามปกติและสามารถติดตั้งเพื่อทำให้ปั๊มอัตโนมัติได้
VAV สำหรับการติดตั้งที่ติดตั้งปั๊ม (มากถึงเก้าตัว) พร้อมมอเตอร์ไฟฟ้าลัดวงจรแบบอะซิงโครนัสแรงดันสูงและแรงดันต่ำ อุปกรณ์ดังกล่าวมีการป้องกันการสั่นสะเทือนและสามารถใช้ในเหมืองที่ไม่ปลอดภัยต่อแก๊สหรือเลื่อย
ก่อนดำเนินการที่สำคัญที่สุดในการควบคุมการติดตั้งเครื่องสูบน้ำ จะต้องเตรียมปั๊มก่อนเปิดเครื่อง ในช่วงเวลาที่มีการขยายตัวมากที่สุดนี้ มีวิธีเติมน้ำในปั๊มเติมด้วยปั๊มเติมซึ่งอยู่ในถังเก็บน้ำที่อยู่ต่ำกว่าระดับล่างและเติมน้ำอยู่ตลอดเวลา
แผนภาพไฮดรอลิกของการติดตั้งระบายน้ำอัตโนมัติแสดงไว้สำหรับตัวเล็ก 7.1
มาลีนอค 7.1. แผนภาพไฮดรอลิกของการติดตั้งระบายน้ำอัตโนมัติ
นี่คือภาพ: เซ็นเซอร์ 1 ระดับ; 2 - อุปกรณ์ควบคุม (รีเลย์ควบคุมระดับ); 3 - กลไกการแทรกทางกลพร้อมไดรฟ์ไฟฟ้า 4 - ท่อระบายน้ำพร้อมเช็ควาล์ว; 5 - รองเซ็นเซอร์รีเลย์; 6 - เซ็นเซอร์อุณหภูมิ; 7 - เซ็นเซอร์ผลผลิต - รีเลย์; 8 - ปั๊มเติมใต้น้ำ
อุปกรณ์วีเอวีจะให้การควบคุมหน่วยสูบน้ำแบบอัตโนมัติระยะไกลและแบบแมนนวล
ในโหมดอัตโนมัติ อุปกรณ์จะเปิดชุดสูบน้ำโดยรักษาระดับน้ำในอ่างเก็บน้ำ จะทำให้แน่ใจว่ามอเตอร์ไฟฟ้าของปั๊มเปิดอยู่ในระหว่างการทำงานแบบขนานของชุดปั๊มเพื่อปิดการใช้ไอพ่นสตาร์ทและแรงกระแทกไฮดรอลิก เปิดปั๊มสำรองเมื่อคนงานออกจากอาการหงุดหงิด เติมปั๊มหลักหรือปั๊มเสริมและควบคุมการเติมรายชั่วโมง ติดตามการทำงานเพื่อเพิ่มผลผลิตและการป้องกันจากโหมดฉุกเฉิน
มาดูวงจร VAV ของหุ่นยนต์ในโหมดอัตโนมัติกันดีกว่า ชี้ไปที่รูป หลักการ 7.2 วงจรไฟฟ้าสำหรับระบบอัตโนมัติของปั๊มหนึ่งตัวสอดคล้องกับโรงงานส่งออก
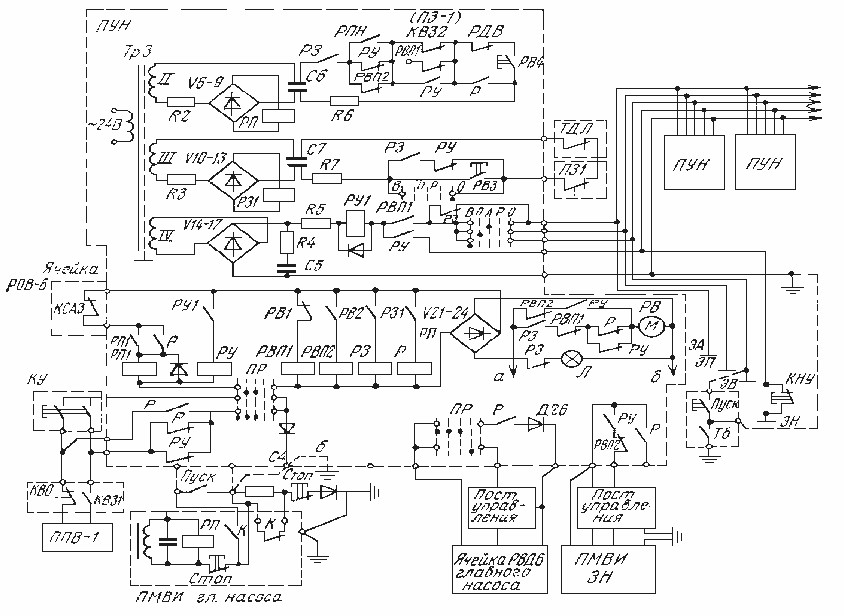
มาลีนอค 7.2. แผนภาพไฟฟ้าหลักการของอุปกรณ์ VAV
สวิตช์ตำแหน่ง PR อยู่ในตำแหน่งสำหรับการทำงานของปั๊มระดับบน (B) เมื่อจ่ายแรงดันไฟฟ้าให้กับชุดควบคุมไฟสัญญาณจะสว่างขึ้นและรีเลย์ทริกเกอร์ RZ1 เชื่อมต่อกับวงจร: ขดลวด III ของหม้อแปลง TP3, ตัวเก็บประจุ C7, หน้าสัมผัสของเซ็นเซอร์อุณหภูมิ TDL, หน้าสัมผัสของสวิตช์เทอร์มินัล PZ1, แอคทูเอเตอร์สำหรับโหมดหุ่นยนต์ PR, ตัวต้านทาน R7, ตัวเก็บประจุ C7, ไดโอด Mist D10 -D13, ตัวต้านทาน R3, ขดลวด III TP3 ด้วยหน้าสัมผัสปิด รีเลย์ P31 จะเปิดรีเลย์ป้องกัน RZ ซึ่งพร้อมก่อนที่สวิตช์แลนซ์จะเปิดทางเข้าและปั๊มส่วนหัว
เมื่อเซ็นเซอร์ระดับบน EB สัมผัสกับน้ำ วงจรของรีเลย์กลาง RU1 จะถูกปิดและใช้งาน (ขดลวด IV TP3, D14, D17, R5, RU1, RVP1, PR, EB, น้ำกราวด์, ขดลวด IV TP3 ). บทบาทของ Relia ด้วยการติดต่ออย่างกระตือรือร้นกับรีเลย์ของรีเลย์ควบคุม ru (Vvedennya B, D21-D24, RU1, Ru, pr, บทนำ a), จามรีด้วยการติดต่ออย่างกระตือรือร้นของ RA Elektrom Ences Schunttes การติดต่อของรีเลย์ RA1 ถึง Tikh Pir น้ำซ้ายใน Modzbirnik ไม่จมระดับอิเล็กโทรดล่าง EH
รีเลย์ RU ที่มีหน้าสัมผัสปิดจะเปิดสตาร์ทของปั๊มตัวเติม (การสตาร์ทของปั๊มหัว) และมอเตอร์ M ของรีเลย์มอเตอร์และโปรแกรมตัวเติมจะทำงานโดยเริ่มและใช้งานหัวปั๊ม
ในระหว่างวัน หน้าสัมผัสของรีเลย์ RV4 จะปิดและรีเลย์ RP เปิดอยู่ (ขดลวด II TP3, C6, R3-RVP2, RU, RDV, RV4, R6, C6, D6-D9-R2, ขดลวด II Tr 3) ซึ่งเปิดรีเลย์โดยมีจุดเริ่มต้นหน้าสัมผัสปิดของหัวปั๊ม R หน้าสัมผัสที่เหลือจะสลับบนสตาร์ทเตอร์ PPV1 ไปที่ไดรฟ์ของช่องเปิดและ RVD6 กลาง (เป็นมอเตอร์ไฟฟ้าแรงสูง) หรือสตาร์ทเตอร์ (เป็นมอเตอร์ไฟฟ้าแรงสูงต่ำ) มอเตอร์แรงดันไฟฟ้า) ของหัวปั๊ม
หลังจาก 383 วินาที (หนึ่งชั่วโมงในการทำงานของปั๊มหัว) หน้าสัมผัสของรีเลย์ RV2 จะปิดลงและรีเลย์ RVP2 จะเปิดขึ้น ซึ่งจะเปิดแลนซ์มอเตอร์ที่ทำงานอยู่ของรีเลย์มอเตอร์ RV และรีเลย์ RP มอเตอร์ M สั่น และรีเลย์ RVP2 จะอยู่ในชุดสับเปลี่ยนนี้โดยหน้าสัมผัสของรีเลย์ตัวเปลี่ยนแท็ปออนโหลด
หลังจากสูบน้ำไปที่ระดับล่างแล้ว วงจรจ่ายไฟของรีเลย์ RU1 จะเปิดขึ้น ซึ่งจะเปิดและเปิดวงจรชีวิตของรีเลย์ RU นี่เป็นการสั่งงานไดรฟ์โหลดจนกระทั่งสตาร์ทเตอร์ PPV1 เปิดอยู่ และจะปิด
เมื่อล็อคปิดอยู่ หน้าสัมผัส KVZ2 จะเปิดขึ้นและรีเลย์ RP จะปิด มอเตอร์ปั๊มหัวเปิดอยู่ในปริมาณที่พอเหมาะ หลังจากที่สตาร์ทเตอร์ปิดสนิทแล้ว สตาร์ทเตอร์ PPV1 จะถูกเปิดโดยหน้าสัมผัสตำแหน่งสิ้นสุด KVZ1
รีเลย์ RU ที่มีหน้าสัมผัสจะเปิดมอเตอร์ M และรีเลย์มอเตอร์ RV จะถูกหมุนไปที่ตำแหน่งเริ่มต้นซึ่งมอเตอร์ M จะเชื่อมต่ออันเป็นผลมาจากหน้าสัมผัส RVP1
7.4 การวิเคราะห์อัลกอริธึมหุ่นยนต์ทั่วไป
เช่นเดียวกับอัลกอริธึมมาตรฐานสำหรับการทำงานของการติดตั้งเครื่องสูบน้ำของฉันซึ่งอาจขยายในอุปกรณ์อนุกรมของการผลิต Radiansky การทำงานของระบบสูบน้ำจะขึ้นอยู่กับลำดับปัจจุบัน
หลังจากเปิดอุปกรณ์และซอฟต์แวร์ในหุ่นยนต์แล้ว การไหลของน้ำในตัวกักเก็บน้ำจะถูกตรวจสอบโดยใช้เซ็นเซอร์อิเล็กโทรด (ในทางตรรกะมากขึ้น ร- หากน้ำเพิ่มขึ้นถึงเซ็นเซอร์ระดับบน จะได้รับคำสั่งให้เปิดปั๊มเติม ZPN ซึ่งจ่ายน้ำให้กับปั๊มเป็นเวลาหนึ่งชั่วโมง โดยถ่ายโอนโดยหน่วยซอฟต์แวร์ ความเข้มของการเติมจะถูกควบคุมโดยรีเลย์รอง RDV (ในทางตรรกะมากกว่าเค ร- ในขณะที่ควบคุมระดับไวน์ ระดับขั้นสูงหรือระดับฉุกเฉินได้มาถึงแล้ว (= 0) บล็อกซอฟต์แวร์จะเปิดวงจรทันที
n ปั๊มทันที จากนั้นจึงเปิดปั๊มรองพื้น).
หากปั๊ม (หรือปั๊ม) ถูกน้ำท่วม จะมีคำสั่งให้นำปั๊มเข้าสู่หุ่นยนต์พร้อมการควบคุมประสิทธิภาพการผลิตเพิ่มเติม นอกเหนือจากสัดส่วนของรีเลย์ประสิทธิภาพการทำงานของ tap-changer ขณะโหลด (ตามหลักเหตุผลมากกว่า)
ร
ทันทีที่ปั๊มเพิ่มผลผลิตที่ระบุ (r = 1) วงจรจะสลับเพื่อควบคุมระดับล่าง เมื่อไปถึงปั๊มใดก็ตามที่เปิดอยู่
ดังนั้นอุปกรณ์อัตโนมัติหลักสำหรับประเภทน้ำประปาในเหมืองคือ AT, VAV, KAV, UAV เป็นต้น ใช้หลักการสูบน้ำเพียงสองตำแหน่งโดยหน่วยสูบน้ำ ซึ่งรับประกันการเปลี่ยนแปลงในประสิทธิภาพของคอมเพล็กซ์การสูบน้ำโดยไม่ต้องเปลี่ยนจำนวนปั๊มที่ใช้งาน
การปรับปรุงประสิทธิภาพการทำงานของการติดตั้งเครื่องสูบน้ำเพิ่มเติมสามารถทำได้โดยการสร้างระบบที่รับประกันการควบคุมประสิทธิภาพของปั๊มตามอัลกอริทึมหรือถ่ายโอนไปยังการสูบน้ำอย่างต่อเนื่อง (การทำงานบน "กระแสน้ำ")
สำหรับเหตุผลนี้:
ความจุที่ต้องการของผู้รวบรวมน้ำจะลดลง 30-50%
ความตึงของมอเตอร์ไฟฟ้าของชุดปั๊มลดลง 35-75% และมีความเป็นไปได้ที่จะซบเซาน้อยกว่าประสิทธิภาพของปั๊ม
การติดตั้งปั๊มน้ำแบบหุ่นยนต์เริ่มไม่ปลอดภัยมากขึ้นเรื่อยๆ เนื่องจากปั๊มประมาณ 60% ล้มเหลวเมื่อปั๊มเริ่มทำงาน
ต้นทุนการจัดหาน้ำจะเปลี่ยนแปลงสำหรับการสูบน้ำแบบเข้มข้นในปีที่มีการใช้พลังงานขั้นต่ำ หากอัตราค่าไฟฟ้ามีน้อย
การควบคุมประสิทธิภาพการทำงานของปั๊มซับเซ็นทรัลโดยอัตโนมัติสามารถทำได้โดยการเปลี่ยนความลื่นไหลของเส้นรอบวงของล้อใบพัดหรือไม่ต้องเปลี่ยนเลย
วัตถุประสงค์ของการควบคุมใน ACS โดยการติดตั้งเครื่องสูบน้ำคือตัวกักเก็บน้ำ B และพารามิเตอร์เอาต์พุตคือระดับน้ำ N ซึ่งจะต้องได้รับการสนับสนุนจากการเปลี่ยนแปลงอย่างต่อเนื่องในประสิทธิภาพการผลิต Q ของปั๊ม การไหลเข้าที่เท่ากันในระบบนี้คือการไหลเข้าของน้ำ Q เป็นต้น ระดับที่แตกต่างของวัตถุดังกล่าว

de dH / dt - ความเร็วของการเปลี่ยนระดับน้ำในอ่างเก็บน้ำ, m / s;
Q pr - กระแสน้ำ, m 3 / s;
k in = 1 / F - สัมประสิทธิ์การถ่ายโอนของวัตถุ (F - พื้นที่รับน้ำ, m 2)
Q n - ผลผลิตของปั๊ม m 3 / s
วัตถุนั้นเป็นลิงค์อะสแตติกของลำดับแรกซึ่งส่งฟังก์ชันของลำดับนั้น
ปั๊มมีลักษณะเฉพาะคือความเรียบของใบพัด ที่ทางเข้าและประสิทธิภาพการผลิต Qn ที่ทางออก สามารถแสดงด้วยลังกาลำดับที่หนึ่งเป็นระยะๆ พร้อมฟังก์ชันถ่ายโอน
ความเร็วสูงสุดของใบพัดปั๊มสามารถเปลี่ยนแปลงได้โดยการเปลี่ยนความถี่ f ของแรงดันไฟฟ้าเพื่อจ่ายไฟให้กับมอเตอร์ไฟฟ้าของปั๊ม
การควบคุมความถี่ใน ACS ในกรณีนี้เกี่ยวข้องกับตัวแปลงความถี่ไทริสเตอร์ของ TFC ซึ่งเป็นสัญญาณควบคุม ที่จ่ายให้กับชุดควบคุม BU การเปลี่ยนแปลงของพารามิเตอร์เอาต์พุตของวัตถุ N ดำเนินการโดยเซ็นเซอร์ระดับรีโมทคอนโทรล เครื่องหมายและเท่ากับสัญญาณความไม่สะดวก U ระหว่าง U จริงและค่า U 3 ที่กำหนดเท่ากับบ่งชี้ลักษณะของสัญญาณเอาท์พุตไปยังชุดควบคุม CU สัญญาณ U f і U 3 เป็นสัดส่วนเท่ากัน H 3 i N f เพื่อดักจับสัญญาณ U f อย่างต่อเนื่อง จะใช้เซ็นเซอร์อุปนัยและรีโอสแตติกที่มีองค์ประกอบไวต่อโฟลต รวมถึงอีควอไลเซอร์ประเภทอื่น
ในช่วงไม่กี่ปีที่ผ่านมา อุตสาหกรรมจอร์เจียได้เห็นการเกิดขึ้นของวิธีการขยายในการควบคุมประสิทธิภาพของปั๊มที่ความถี่คงที่ของการหมุนของใบพัดที่ทางเข้าและทางดูด วิธีนี้มีเอกลักษณ์เฉพาะด้วยความเรียบง่ายและค่อนข้างประหยัด
โหมดการควบคุมตนเองเป็นผลมาจากการที่แรงดันมีความแม่นยำ ก(จุดที่นำท่อระบายน้ำไปยังท่อเปียกของปั๊ม) ถูกกำหนดโดยแรงดันอุทกสถิต P a ซึ่งเป็นสัดส่วนกับระดับน้ำในถังเก็บน้ำและความดันในส่วน a-b
หากที่ความดันคงที่ดังกล่าวมีการสูญเสียมากขึ้นในท่อเปียกที่ระยะทาง a - b จากนั้น (P a - P ที่) 0 แสดงว่าไม่มีการส่งคืนไปยังปั๊มและประสิทธิภาพการทำงานสูงสุด เมื่อ (P a - P at) 0 มีน้ำจำนวนมากในปั๊มและประสิทธิภาพการทำงานลดลง
แผนภาพไฮดรอลิกของ ACS สำหรับประสิทธิภาพการทำงานของปั๊มโดยการจ่ายน้ำไปยังเครื่องดูดในโหมดการควบคุมตนเองแสดงไว้ในรูปที่ 7.3 ก
วัตถุประสงค์ของการควบคุมใน ACS เมื่อจ่ายอากาศให้กับเครื่องดูด อาจเป็นตัวกักเก็บน้ำ B ก็ได้ (รูปที่ 7.3, b)

มาลีนอค 7.3. รูปแบบไฮดรอลิก (a) และฟังก์ชัน (b) ของประสิทธิภาพการทำงานของปั๊ม ACS การจ่ายแรงดูด
การจัดแนวดิฟเฟอเรนเชียลของเส้น "ปั๊ม - ไปป์ไลน์" (N กับ - ปั๊ม)
de T n - สอดคล้องกับชั่วโมงลังกา
q คือปริมาตรของเสียจากลม
นอกจากนี้ลิงก์ "ปั๊ม - ไปป์ไลน์" ยังเป็นลิงก์เป็นระยะของลำดับแรกซึ่งส่งการทำงานของฟังก์ชันใด ๆ

เส้นของลังกา "จัดหาท่อ" อธิบายโดยตะเกียงที่ปราศจากความเฉื่อยและช่วยกำลัง:
เพื่อควบคุมประสิทธิภาพการทำงานของหน่วยสูบน้ำโดยอัตโนมัติ สามารถใช้อัลกอริธึมการควบคุมต่างๆ ได้: รักษาระดับน้ำในถังเก็บน้ำให้คงที่ การเปลี่ยนระดับน้ำตามโปรแกรมที่กำหนด การตรวจสอบแรงดันบนยางของสถานีย่อยเหมือง
ในเวลาเดียวกันสิ่งสำคัญคือต้องควบคุมเครื่องเปลี่ยนความถี่เพิ่มเติมซึ่งช่วยให้คุณเปลี่ยนความถี่การหมุนของมอเตอร์ไฟฟ้าของปั๊มได้อย่างราบรื่นและด้วยวิธีนี้จะควบคุมประสิทธิภาพการทำงานและรองรับอัตราการไหลของกระแสน้ำที่แตกต่างกัน
เมื่อความดันต่ำ มอเตอร์ปั๊มจะหมุนโดยมีการไหลต่ำ ซึ่งเพียงพอที่จะรักษาระดับน้ำในอ่างเก็บน้ำ (บ่อ) ให้อยู่ในระดับต่ำ และใช้พลังงานน้อยที่สุด เมื่อการไหลของน้ำถึงค่าสูงสุด ความลื่นไหลของเครื่องยนต์และเป็นผลให้ผลผลิตเพิ่มขึ้น
7.5 ระบบควบคุมปั๊มแบบปรับความถี่ได้
สิ่งที่สำคัญที่สุดตามที่ระบุไว้ก่อนหน้านี้คือการควบคุมตัวแปลงความถี่เพิ่มเติมซึ่งช่วยให้คุณเปลี่ยนความถี่การหมุนของมอเตอร์ไฟฟ้าของปั๊มได้อย่างราบรื่นและด้วยวิธีนี้จะควบคุมประสิทธิภาพการทำงานและรักษาการไหลลงสู่น้ำ irnik ด้วย ลำน้ำสาขาต่างๆ ด้วยการไหลเข้าเล็กน้อย มอเตอร์ปั๊มจะหมุนด้วยความลื่นไหลต่ำ ซึ่งจำเป็นต่อการรักษาระดับต่ำสุด (ต่ำกว่า) เท่านั้น และใช้พลังงานน้อยที่สุด
รูปภาพขนาดเล็ก 7.4 แสดงแผนภาพการทำงานควบคุมมอเตอร์ไฟฟ้าของปั๊มพร้อมเครื่องเปลี่ยนความถี่ FR-A500 จากบริษัท มิตซูบิชิ ไฟฟ้า.
![]()
มาลีนอค 7.4. แผนภาพการทำงานของการควบคุมมอเตอร์ไฟฟ้าของปั๊มพร้อมการปรับความถี่แบบแปรผัน
อินพุตของระบบมาพร้อมกับสัญญาณคำสั่งและสัญญาณที่นำมาจากเซ็นเซอร์ระดับ ความแตกต่างระหว่างค่าจริงและค่าที่ตั้งไว้ของระดับจะถูกแปลงโดยตัวควบคุมให้เป็นสัญญาณอ้างอิงความถี่ ซึ่งเมื่อฉีดเข้าไป จะเปลี่ยนความถี่การหมุนของมอเตอร์ปั๊ม ซึ่งจะช่วยลดความแตกต่างระหว่างค่าที่ตั้งและค่าจริง ของระดับเป็นศูนย์ ด้วยวิธีนี้ จะรักษาปริมาณน้ำขั้นต่ำในอ่างเก็บน้ำโดยไม่คำนึงถึงระดับน้ำที่เพิ่มขึ้น
การแปลงความถี่ในปัจจุบันช่วยให้คุณสร้างระบบควบคุมที่ซับซ้อนใดๆ ก็ได้โดยไม่ต้องใช้ฮาร์ดแวร์เพิ่มเติม - ในลักษณะทางโปรแกรมด้วยความช่วยเหลือของตัวควบคุมทางอุตสาหกรรมที่ตั้งโปรแกรมไว้
ในกรณีนี้ก็เป็นไปได้ที่จะใช้อัลกอริธึมหุ่นยนต์ของระบบควบคุมปั๊มน้ำในตัวตามกฎของตรรกะคลุมเครือ
การเพิ่มผลงานที่ดีของคุณลงในฐานข้อมูลเป็นเรื่องง่าย Vikorist ขึ้นรูปโดยแรเงาด้านล่าง
นักศึกษา นักศึกษาระดับบัณฑิตศึกษา คนหนุ่มสาวที่จะเพิ่มฐานความรู้ให้กับอาชีพและการทำงานจะยิ่งพิเศษสำหรับคุณมากขึ้น
โพสต์เมื่อ http://www.allbest.ru/
กระทรวงแสงสว่างแห่งภูมิภาคมอสโก
การติดตั้งไฟส่องสว่างงบประมาณของรัฐ
การศึกษาวิชาชีพชั้นมัธยมศึกษา
ภูมิภาคมอสโก
“วิทยาลัยเทคนิคอุตสาหกรรมและเศรษฐกิจกลิ่นกลิ่น”
บทคัดย่อในหัวข้อ:
“การควบคุมสถานีสูบน้ำอัตโนมัติ”
วิโคนาฟ
นักเรียนกรัม TM-11
เป็น.
คาเรลิน
วัตถุประสงค์และหลักการทำงานของสถานีสูบน้ำ สถานีสูบน้ำประปาเป็นส่วนสำคัญของระบบจ่ายน้ำไปยังห้องโดยสารหรือกระท่อมในรูปแบบที่แยกออกจากปั๊มน้ำอัตโนมัติกลีบินนีห์ สแวร์ดโลวินส์ -ในเหตุการณ์ไฟกระชากหลายครั้ง เครื่องจะสั่นสะเทือนเมื่อสูบน้ำจาก
สายส่งน้ำ-
การทำงานของหน่วยสูบน้ำไฟฟ้า ในระบบภายในประเทศและต่างประเทศในปัจจุบัน โหมดการควบคุมของชุดปั๊มแบบหุ่นยนต์ทำงานโดยใช้ไดรฟ์ไฟฟ้าที่ควบคุมอัตโนมัติ ในระบบดังกล่าว พารามิเตอร์ที่ได้รับการควบคุมคือความดันของรัศมี การพัฒนาเทคโนโลยีในปัจจุบันทำให้สามารถปฏิบัติงานกดดันได้อย่างแม่นยำ อย่างไรก็ตาม ความแม่นยำสูงของแรงขับนั้นมาพร้อมกับการเปลี่ยนแปลงความถี่ของมอเตอร์ไฟฟ้าของชุดปั๊มอย่างต่อเนื่อง และด้วยเหตุนี้ รอบองค์ประกอบของชุดปั๊มจึงมีความสำคัญอย่างมีนัยสำคัญ (ข้อต่อแบบยืดหยุ่นที่เชื่อมต่อ ปั๊มไปที่มอเตอร์ unom i in) ซึ่งจะดำเนินการก่อนที่จะถอดออกทันที ดังนั้นในหลาย ๆ สถานการณ์จึงจำเป็นต้องติดตั้งโซนการเลื่อนของระบบควบคุมซึ่งจะลดความแม่นยำของการรักษาเสถียรภาพของแรงดัน
ในแอกของไดรฟ์ไฟฟ้าที่ได้รับการควบคุมของชุดปั๊มในระบบจ่ายน้ำร้อน พลังแห่งชัยชนะของไดรฟ์ไฟฟ้าประเภทใดประเภทหนึ่งจะถูกถ่ายโอน รวมถึง: ข้อต่อตัวเหนี่ยวนำ (IMC) พร้อมไดรฟ์ที่ตื่นเต้นจากหน่วยไทริสเตอร์ BU-3509 และ คนอื่นชอบพวกเขา ตัวแปลงความถี่ของซีรีย์ PChT, PChR-2 SAMI (บริษัท Stromberg) และประเภทอื่น ๆ ไดรฟ์ไฟฟ้าด้านหลังวงจร AVK ที่ใช้ตัวแปลง TDP-2 และสถานีควบคุม ShDU ไดรฟ์ไฟฟ้าที่ใช้มอเตอร์ไฟฟ้าแบบวาล์วพร้อมวาล์วแบบพลิกกลับได้ PCVN, PCVS
การรักษาแรงดันให้คงที่นั้นเกิดจากการที่มีการเปลี่ยนแปลงปริมาณน้ำความดันจะเพิ่มขึ้นและความถี่การหมุนของมอเตอร์ไฟฟ้าของปั๊มจะเปลี่ยนไปอันเป็นผลมาจากระบบควบคุม อย่างไรก็ตาม ด้วยการจ่ายน้ำที่เพิ่มขึ้น ความดันของแกนจะลดลง และความถี่ของการห่อจะเพิ่มขึ้น ระบบหลักในการรักษาเสถียรภาพแรงดันในระบบท่อคือการรักษาแรงดันที่การตั้งค่าแรงดัน
ในระบบรักษาแรงดันตามช่วงเวลา จำเป็นต้องเปิดปั๊มที่ไม่ควบคุมเพิ่มเติมเมื่อมีการไหลเพิ่มขึ้นหรือจ่ายน้ำ และปิดเมื่อมีการเปลี่ยนแปลง
โดยไม่คำนึงถึงข้อดีที่ชัดเจน การควบคุมการขับเคลื่อนด้วยไฟฟ้ายังไม่ได้รับความหลากหลายในหน่วยปั๊ม ในชั่วโมงนี้ จิตใจของพวกเขาถูกดึงเข้าหากันเพื่อให้มีกำลังมากขึ้น การพัฒนาเทคโนโลยีการส่งผ่านอย่างรวดเร็วทำให้สามารถสร้างไดรฟ์ไฟฟ้าควบคุมที่เชื่อถือได้และราคาไม่แพงบนพื้นฐานของตัวแปลงแบบคงที่ นอกจากนี้ วิกฤตพลังงานแสงแสดงให้เห็นอย่างชัดเจนถึงคุณค่าที่แท้จริงของแหล่งพลังงานและกระตุ้นให้เกิดแนวทางในการใช้อย่างมีเหตุผล เป็นผลให้การวิจัย การพัฒนา และการสร้างหน่วยปั๊มที่ติดตั้งระบบขับเคลื่อนไฟฟ้าควบคุมอัตโนมัติได้ขยายออกไป
ระบบที่ได้รับการยอมรับสำหรับการควบคุมอัตโนมัติและแบบแมนนวลโดยหน่วยสูบน้ำที่มี asynhrony eektrodviguns, yaki prazuyut ในระบบน้ำประปาของเรือดำน้ำของ vodovydennya ถึง pidemim ของ viga ที่กำหนดของการขับเคลื่อนใน Magistral abstract ในนักเทคโนโลยีในเทคโนโลยี
ความเป็นไปได้ของระบบบำบัดน้ำอัตโนมัติพร้อมสถานีสูบน้ำ:
· อัตโนมัติ, แมนนวล การบำบัดทางไกลหน่วยสูบน้ำ
·การรวบรวมข้อมูลเกี่ยวกับสถานะของวัตถุสกินที่ควบคุม
·การรวบรวมข้อมูลเกี่ยวกับการตั้งค่าพารามิเตอร์ของทางหลวงขาเข้าและขาออกระดับ
· การควบคุมวาล์วปิดและควบคุมในโหมดอัตโนมัติ โหมดแมนนวล และระยะไกลโดยผู้มอบหมายงาน
· การแสดงข้อมูลเกี่ยวกับสถานะของออบเจ็กต์ในโปรแกรมแก้ไขกราฟิกบนหน้าจอศูนย์ควบคุม
· เมื่อทำงานในโหมดอัตโนมัติ ให้ควบคุมระยะเวลาการใช้ปั๊มผิวหนัง
· สถานีจะจัดให้มี:
· ประหยัดการใช้พลังงาน (ไม่น้อยกว่า 50 ... 65%) และลดการใช้น้ำ
·การแลกเปลี่ยนกระแสเริ่มต้นในระยะขอบ;
· เพิ่มอายุการใช้งานของมอเตอร์ไฟฟ้าของปั๊ม
· การเปลี่ยนแปลงจำนวนเจ้าหน้าที่เขียนแบบและซ่อมแซม
Vikoristannya ของอีเจ็คเตอร์ในสถานีสูบน้ำ
สถานีสูบน้ำสำหรับสว่านจะมีเครื่องฉีดน้ำหรือเครื่องฉีดน้ำ ซึ่งเชื่อมต่อกับปั๊มฉีดน้ำแบบกึ่งกลางศูนย์ เม่นคตอร์- อุปกรณ์ที่พลังงานจลน์ถูกถ่ายโอนจากตัวกลางหนึ่งซึ่งพังทลายลงด้วยความลื่นไหลมากขึ้นไปยังอีกตัวหนึ่ง อีเจ็คเตอร์กำลังทำงานอยู่ กฎเบอร์นูลลี, สร้างความกดดันของตัวกลางตัวกลางตัวหนึ่งบนแผ่นใยที่เรียวเล็กลง ซึ่งเรียกร้องให้มีการเคลื่อนตัวไปสู่การไหลของตัวกลางตัวกลางอีกตัวหนึ่ง ซึ่งจะถูกถ่ายโอนและกำจัดออกจากจุดที่ให้ความชุ่มชื้นด้วยพลังงานของตัวกลางตัวแรกที่มองหา ตัวเลือกแรกขึ้นอยู่กับความน่าเชื่อถือที่เพิ่มขึ้น ซึ่งสามารถปล่อยแรงดันสูงโดยมีความลึกในการแช่ที่เพียงพอเพื่อความซบเซาในทางปฏิบัติ โปรเจ็กเตอร์นี้ทำด้วยมือโดยเฉพาะในรูเจาะแบบ "หัว" ซึ่งเป็นท่อที่ดันลงดินจนถึงทรงกลมที่รองรับน้ำ อีกทางเลือกหนึ่งสถานีสูบน้ำใช้ปั๊มประเภทเดียวกันอย่างไรก็ตามไม่ได้ใช้อีเจ็คเตอร์ในตัว แต่เป็นปั๊มที่ช่วยให้คุณสามารถยกน้ำจากบ่อได้สำเร็จซึ่งไปลึกได้ถึง 50 เมตร หรือมากกว่า. ยูนิตหลักถูกยกขึ้น และตัวดีดออกสองท่อลงไปที่ด้านล่าง ส่วนใหญ่แล้วระบบน้ำประปาดังกล่าวจะถูกติดตั้งในระดับน้ำประปาที่สำคัญจากที่อยู่อาศัย ข้อบกพร่องของมันคือวิกฤตจนกระทั่งน้ำขุ่นและมี CCD ที่ค่อนข้างต่ำ
เกี่ยวกับเครื่องกำเนิดไฟฟ้าสถานีสูบน้ำ
ผู้นำด้านแสงสว่างที่มีชื่อเสียงซึ่งผลิตสิ่งที่ดีที่สุดในด้านราคาและฟังก์ชันการทำงานของสถานีสูบน้ำอุตสาหกรรมและในประเทศคือ บริษัท Marina และ Calpeda ของอิตาลี ก่อนโอนรายการต่อไปนี้กรุณาเพิ่ม:
·ความน่าเชื่อถือ;
·การทำงานที่เงียบ
· ความง่ายในการเชื่อมต่อและการเชื่อมต่อ
· มีช่วงของรุ่นเพียงพอ
· ชุดที่สมบูรณ์;
· ความกะทัดรัด;
· ความเรียบง่ายและความรอบคอบของระบบอัตโนมัติ
· ทัศนวิสัย คุณสมบัติที่มีประสิทธิภาพซาคิสตู;
· ทรัพยากรมอเตอร์ที่สำคัญ
ราคาของสถานีสูบน้ำขึ้นอยู่กับความเป็นไปได้ของคุณ ซีรี่ส์ต่อไปนี้เป็นที่นิยมมากที่สุดในหมู่ผู้ซื้อ:
· ชุดลูกเบี้ยวสำหรับน้ำประปาจาก Sverdlovin ถึง Glibini สูงถึง 9 เมตร
· ชุดเอพีเอ็มสำหรับน้ำประปาจาก Sverdlovin ถึง Glibini สูงถึง 25 เมตร
· ไอโดแมท ซีรี่ย์ระบบอัตโนมัติที่ใช้ตัวควบคุม Idromat
· ซีรีส์ บี.สถานีบูสเตอร์ที่มีปั๊มมากถึง 6 ตัว
· ชุดมินิแมท, เทอร์โบแมท, เซนทริแมทіเก็ตโตแมท-
· ระบบอัตโนมัติพร้อมถังเมมเบรนซีรีส์ อีซี่แมท
-
ความสำคัญของการติดตั้งปืนอัตตาจรพร้อมระบบขับเคลื่อนไฟฟ้าที่ได้รับการควบคุมในสถานีสูบน้ำ เนื่องจากเรามีราคาที่แข่งขันได้สำหรับไฟฟ้าที่เป็นเจ้าของและเจ้าหน้าที่อื่น ๆ ในหุ่นยนต์ VNI IVODGEO การทดลองยืนยันสมมติฐานเหล่านี้ดำเนินการที่สถานีสูบน้ำ Ivanivsk ในมอสโก ที่สถานีนี้มีการติดตั้งเครื่องสูบน้ำ 2 เครื่องซึ่งมี 6 เครื่องที่ติดตั้ง IMS ซึ่งผลิตเป็นชุด พารามิเตอร์ที่กำหนดของหน่วย: อัตราการไหล 800 m3 / ปี (O, 22 m3 / s), ความดัน 33 m (O, 33), แรง 160 kW, ความถี่การหมุน 960 รอบต่อนาที, แรงบิด IKS 1, 60 kNm (160 kgf / m ) . โหมดการทำงานของการติดตั้งที่ไม่มีไดรฟ์ไฟฟ้าควบคุมจะถูกควบคุมโดยการเปิดและปิดชุดปั๊มเป็นระยะ หมายเลขการเปิดสวิตช์กลายเป็น 30-40 ต่อหน่วย และจำนวนหน่วยปฏิบัติการในสระน้ำเปลี่ยนจาก 1 เป็น 6 ระบบควบคุมอัตโนมัติเปลี่ยนความถี่การหมุนของหน่วยควบคุมหนึ่งหรือสองชุดและจำนวนหน่วยปฏิบัติการ โปรดรอสักครู่ จนกว่ากระแสน้ำจะเปลี่ยน ความถี่ในการห่อจะเปลี่ยนไปตามสัญญาณไอเสีย ซึ่งสร้างขึ้นเมื่อระดับออกจากการตั้งค่าชั่วคราว สัญญาณที่สร้างขึ้นตามกฎ PI ไปที่อินพุตของระบบควบคุมเฟสพัลส์ของสัญญาณเตือนไทริสเตอร์ IMS ทิมเองควบคุมการไหลของการเปิดใช้งานดังนั้นความถี่ในการหมุนของมอเตอร์ไฟฟ้าของปั๊ม ในกรณีที่มีการเปลี่ยนแปลงของกระแสน้ำอย่างแท้จริง หากการเปลี่ยนแปลงความถี่ของปั๊มควบคุมไม่รับประกันการเปลี่ยนแปลงที่จำเป็นในการจ่ายน้ำของชุดปั๊ม ความจำเป็นในการเปลี่ยนแปลงก็จะเกิดขึ้น หมายเลขฮาลาลหน่วยปฏิบัติการที่สถานี วัตถุประสงค์ของหน่วยในการปฏิสัมพันธ์ของหน่วยควบคุมและไม่ได้รับการควบคุมคืออะไร? หน่วยจะเปิดการหมุนจากหน่วยที่ไม่ได้รับการควบคุม และบังคับให้การเปิดใช้งาน IKS เป็นค่าสูงสุดของการไหล (5 A) ในขณะที่ความถี่การหมุนของปั๊มควบคุมต่ำพอที่จะทำให้วาล์วประตูปิดและ ปั๊มเริ่มสูบน้ำ หากความถี่การหมุนของปั๊มควบคุมถึงค่าสูงสุด และการไหลยังคงเพิ่มขึ้น และการติดตั้งไม่สามารถรับมือกับการสูบน้ำเสียจากถังได้ หน่วยจะเปิดหน่วยที่ไม่ได้รับการควบคุมเพิ่มเติมอีกหนึ่งหน่วย และเปลี่ยนการเปิดใช้งาน IMS เป็นค่าต่ำสุด . ระบบรับประกันความเสถียรของระดับในอ่างเก็บน้ำของสถานีสูบน้ำด้วยความแม่นยำ 50 มม. และการปรับระยะสั้น (สูงสุด 350 มม.) เมื่อเชื่อมต่อหรือยกเลิกการเชื่อมต่อหน่วยสูบน้ำที่ไม่ได้รับการควบคุม ระบบช่วยให้คุณควบคุมความถี่ของการหมุนของหลายหน่วยในแต่ละครั้ง ในกรณีนี้คือสองหน่วย ความจำเป็นสำหรับโหมดหุ่นยนต์ดังกล่าวเกิดขึ้นเมื่อมีการเคลื่อนที่ของกระแสน้ำเหนือแหล่งจ่ายของปั๊มหนึ่งตัวเล็กน้อย ในระบบดังกล่าว มีความคล้ายคลึงกันระหว่างการทำงานของหน่วยที่ได้รับการควบคุมและไม่ได้รับการควบคุม ดังนั้นความต้องการหน่วยที่ได้รับการควบคุมจึงมีเพียง 5-10% ของมูลค่าที่ระบุ การเปลี่ยนแปลงเล็กน้อยของกระแสน้ำจะส่งผลให้มีการเปิดและปิดหน่วยที่ไม่ได้รับการควบคุม เป็นผลให้เกิดการไหลเข้าที่สำคัญซึ่งระบบควบคุมไม่สามารถกำจัดออกได้ การทำงานแบบซิงโครนัสของชุดควบคุม 2 ชุด ซึ่งเทียบเท่ากับการทำงานของชุดแรงดันสูงชุดเดียว จะช่วยหลีกเลี่ยงสาเหตุของโหมดการทำงานที่ไม่เสถียร การปรับปรุงระบบควบคุมทำให้สามารถลดการใช้ไฟฟ้าได้ประมาณ 10% หรือ 170,000 กิโลวัตต์ต่อแม่น้ำ รวมถึงจำนวนหน่วยสูบน้ำจาก 30 หน่วยเป็น 3 หน่วยต่อหน่วย
การเพิ่มประสิทธิภาพของหน่วยสูบน้ำนั้นมั่นใจได้โดยการแนะนำอุปกรณ์ที่เปลี่ยนจำนวนหน่วยปฏิบัติการก่อนที่การควบคุมของหน่วยสูบน้ำจะเข้าสู่โซนของปัจจัยประสิทธิภาพต่ำที่ยอมรับไม่ได้ อุปกรณ์ดังกล่าวถูกถอดประกอบที่ VNIIVODGEO และได้รับการทดสอบที่สถานีสูบน้ำแห่งหนึ่งในมอสโกที่มีอยู่ ทันทีหลังการดำเนินการเมื่อเปิดเผยความน่าเชื่อถือที่ต่ำมากของ IC พวกมันถูกผลิตจำนวนมากโดยอุตสาหกรรมของเราซึ่งไม่อนุญาตให้เราแนะนำให้ใช้พวกมันอย่างแพร่หลายจนกว่าจะถึงลักษณะสุดท้าย IMS ซึ่งจัดทำโดย บริษัท ต่างประเทศ มีการทดสอบระบบควบคุมจำนวนหนึ่งที่โรงงาน: ด้วยตัวควบคุมแบบแยกและแบบอะนาล็อกประเภทต่างๆ ในความคิดของสถานีสูบน้ำ สวิตช์แบบอะนาล็อกที่มีเสียงเรียกเข้าดูเหมือนจะน่าเชื่อถือที่สุด
สถานีสูบน้ำที่มีระบบขับเคลื่อนไฟฟ้าแบบควบคุมด้านหลังวงจร AVK
ในมอสโก SNU ของสถานีสูบน้ำ Kuntsevsk ทำงานที่จุดสูงสุดของชั่วโมง โดยมีการติดตั้งหน่วยสูบน้ำ 6 เครื่องที่มีความจุ 800 กิโลวัตต์ รวมถึงคนงาน 3-4 คน ระบบควบคุมอัตโนมัติประกอบด้วยมอเตอร์ไฟฟ้าแบบอะซิงโครนัสหนึ่งตัวพร้อมเฟสโรเตอร์ที่มีกำลัง 800 กิโลวัตต์และความถี่การหมุน 740 รอบต่อนาที ย้อนกลับ AVK ฟังก์ชั่นที่ใช้หน่วย TDP2ZO4OO-T ซึ่งประกอบด้วย วงจรเรียงกระแสและอินเวอร์เตอร์, โช้คปรับเรียบ FROS-800, หม้อแปลง TS4OO, การควบคุมสถานีของ P3DU90248A และตัวต้านทานสตาร์ท, การเปลี่ยนระดับที่ประกอบด้วยกระดิ่งลมและเกจวัดความดันแตกต่าง ตัวควบคุมพีไอ ระบบรักษาเสถียรภาพของวัตถุดิบในถังด้วยความแม่นยำ 7-10 ซม. ความแม่นยำที่สูงขึ้นของการรักษาระดับเสถียรภาพทำให้นิ้วของข้อต่อยืดหยุ่นที่เชื่อมต่อมอเตอร์ไฟฟ้ากับปั๊ม มีการสึกหรอของรถถังในรถถังเพิ่มขึ้น (ความสูงของรถถังสูงถึง 20 ซม.) ซึ่งต้องการเพิ่มโซนความไม่รู้สึกของปืนอัตตาจรและลดความแม่นยำของการรักษาระดับ หลักการของระบบควบคุมความถี่สำหรับตัวเครื่องนั้นคล้ายคลึงกับที่อธิบายไว้ข้างต้น การเปลี่ยนจำนวนหน่วยสูบน้ำที่ทำงานที่สถานีนั้นดำเนินการโดยเจ้าหน้าที่ปฏิบัติการ ค่าใช้จ่ายในการติดตั้งระบบในหน่วยสูบน้ำจะช่วยประหยัดได้ประมาณ 600,700,000 กิโลวัตต์/ปีของพลังงานไฟฟ้า หรือประมาณ 4-5% ของการใช้พลังงานทั้งหมด
รายจ่ายฝ่ายทุนเพิ่มเติมสำหรับการติดตั้งระบบควบคุมในหน่วยสูบน้ำมีจำนวน 15,000 ถู. กฎระเบียบของหน่วยสูบน้ำมีอายุการใช้งานยาวนานถึง 5,000 ปี
ปัจจุบันเพื่อปรับปรุงประสิทธิภาพของระบบควบคุมอัตโนมัติและลดการสึกหรอของชุดปั๊มที่ได้รับการควบคุม มีการวางแผนที่จะติดตั้งปั๊มอื่นที่มีระบบขับเคลื่อนไฟฟ้าประเภทเดียวกันที่ได้รับการควบคุม
สถานีสูบน้ำที่มีไดรฟ์ไฟฟ้าความถี่
ที่สถานีสูบน้ำ Mosvokstroy (สถานีรถไฟใต้ดินมอสโก) มีมอเตอร์ไฟฟ้าแบบอะซิงโครนัสลัดวงจรฉุกเฉินของปั๊มที่มีแรงดันไฟฟ้า 110 kW/ปี โดยเปิดสวิตช์ผ่านการทำงานใหม่ของ PCHT โดยแบ่งออกเป็น NDI CHEMZ ระบบทำความร้อนที่ขับเคลื่อนด้วยไฟฟ้าได้รับการออกแบบในลักษณะเดียวกันกับที่อธิบายไว้ก่อนหน้านี้ ยกเว้นว่าเป็นคอนเวอร์เตอร์ในระบบการไหลแบบอัลตราโซนิก EXO3 การใช้ไดรฟ์ไฟฟ้าความถี่ในการติดตั้งนี้จะเปลี่ยนปริมาณไฟฟ้าที่ใช้ไป 60,000 KW - ปีต่อแม่น้ำ รวม ประมาณ 5%
ในสถานีสูบน้ำในมอสโกตัวแปลงความถี่ประเภท PChR-2 ยังใช้และผลิตโดย บริษัท Stromberg ของฟินแลนด์โดยอาศัยการสร้างระบบควบคุมอัตโนมัติ 10 ระบบสำหรับโหมดหุ่นยนต์ของสถานีสูบน้ำที่มีหน่วยแรงดัน ID 75 ถึง 160 kW . ระบบควบคุมที่ใช้ตัวแปลงความถี่คงที่ประเภท SAMI จาก Stromberg เปิดใช้งานเป็นเวลาสามชั่วโมงที่สถานี Novo-Nagatinskaya ทำให้ประหยัดพลังงานได้ 7-8% ของการใช้พลังงานทั้งหมด
ตัวแปลงความถี่จาก Stromberg มีแรงดันสูงและมีความสามารถในการควบคุมที่กะทัดรัดสำหรับชุดปั๊ม เพื่อให้แน่ใจว่าหน่วยสูบน้ำมีการไหลสม่ำเสมอ อุปกรณ์จะถูกถ่ายโอนซึ่งสามารถเชื่อมต่อปั๊มได้มากถึงหนึ่งตัว
เนื่องจากช่วงเวลาที่ซบเซาของตัวแปลงความถี่ต่างประเทศประเภท PChT ใน Kharkov, ประเภท EKT - ในเลนินกราดและอื่น ๆ
สถานีสูบน้ำพร้อมระบบขับเคลื่อนโดยใช้มอเตอร์ไฟฟ้าแบบวาล์ว
สถานีสูบน้ำขับเคลื่อนด้วยไฟฟ้า
ที่สถานีสูบน้ำ Filyovskaya ในมอสโก มีการติดตั้งระบบควบคุมอัตโนมัติพร้อมระบบขับเคลื่อนไฟฟ้าแบบปรับความเร็วได้โดยใช้มอเตอร์ไฟฟ้าแบบวาล์ว จากปั๊มหกยี่ห้อ 30-FV-17 ที่ติดตั้งที่สถานี หนึ่งในนั้นติดตั้งไดรฟ์ไฟฟ้าจากการผลิตตัวแปลง PCHVN ซึ่งผลิตโดย NDI KHEMZ กำลังของไดรฟ์ไฟฟ้าคือ 1,600 kW แรงดันไฟฟ้าของมอเตอร์คือ 10 kV การเชื่อมต่อจะเชื่อมต่ออีกครั้งกับแหล่งจ่ายไฟผ่านหม้อแปลงแห้งแบบสเต็ปดาวน์ที่มีความจุ 4000 kVcha และมอเตอร์จะถูกแปลงใหม่ผ่านหม้อแปลงสเต็ปอัพตัวเดียวกัน คลังสินค้าของตัวแปลงยังมีตัวแปลงไทริสเตอร์สำหรับระบบกระตุ้นการทำงานของมอเตอร์ไฟฟ้าซิงโครนัสซึ่งเมื่อติดตั้งแล้วจะไม่แทนที่ไดรฟ์ไฟฟ้า ระบบปั๊มปั๊มไฟฟ้าคล้ายกับที่อธิบายไว้ข้างต้น เป็นตัวตรวจจับระดับการละเมิด เสียงเรียกเข้าและเกจวัดความดันแตกต่างที่มีเอาต์พุต 0-5 mA ในระบบควบคุมบริเวณใกล้เคียงจะมีตัวควบคุม PI ประเภท R-17 การติดตั้งปืนอัตตาจรพร้อมระบบขับเคลื่อนไฟฟ้าที่ได้รับการควบคุมช่วยลดปริมาณการใช้ไฟฟ้าได้ประมาณ 1,200,000 กิโลวัตต์ริก สติการทำงานของเครื่องสูบน้ำก็โล่งขึ้น ความมีสติของบุคลากรปฏิบัติการก็โล่งใจ การวิเคราะห์หุ่นยนต์ ACS และการออกแบบ vykonana แสดงให้เห็นว่าการมีไดรฟ์ไฟฟ้าที่คล้ายกันสำหรับหน่วยปั๊มอื่นจะช่วยให้ประหยัดพลังงานได้มากขึ้นถึงสองเท่า ที่สถานีมีการตรวจสอบอุปกรณ์ที่เปิดการทำงานของปั๊มควบคุมในบริเวณแรงดันต่ำ
โพสต์บน Allbest.ru
...เอกสารที่คล้ายกัน
สถานีสูบน้ำชัยชนะ สำหรับสูบน้ำเสียจากโรงบำบัดน้ำเสีย ออกแบบให้ติดตั้งในบล็อกที่มีพื้นที่บำบัดน้ำเสีย การเลือกอุปกรณ์เพิ่มเติม การพัฒนาทางเทคนิคและเศรษฐกิจทางเทคนิค
งานหลักสูตรเพิ่ม 09/01/2014
ข้อมูลเอาท์พุตสำหรับการพัฒนาทางเทคโนโลยีของท่อส่งน้ำมัน ลักษณะทางกลของท่อเหล็ก การพัฒนาเทคโนโลยีท่อแนฟทา ลักษณะของท่อที่ไม่มีสถานีสูบน้ำและวนซ้ำ การติดตั้งสถานีสูบน้ำบนโปรไฟล์เส้นทาง
งานหลักสูตรเพิ่ม 03/04/2014
การพัฒนาระบบควบคุมสถานีสูบน้ำโดยใช้ตัวแปลงความถี่ การออกแบบมอเตอร์ไฟฟ้าและคุณลักษณะทางกล สั่นเปลี่ยนความถี่ ผลกระทบทางเศรษฐกิจและระยะเวลาของผลรวมของการแก้ปัญหาที่เสนอ
งานประกาศนียบัตรเพิ่ม 01/08/2555
ปั๊มและสถานีเป่าลมเป็นแหล่งพลังงานหลักของระบบประปาและระบายน้ำ เปลี่ยนโหมดของสถานีสูบน้ำหุ่นยนต์ เลือกยี่ห้อของปั๊ม gospodarsko-butovye แผนผังสถานีสูบน้ำ การเลือกอุปกรณ์เพิ่มเติม
งานหลักสูตรเพิ่ม 12/16/2012
วัตถุประสงค์หลักของสถานีบุกเบิกคือการออกแบบ คุณสมบัติของสถานีสูบน้ำบด ข้อมูลเหล่านี้เป็นพื้นฐานของโครงการ อธิบายโครงสร้างปมสปอรูดี การสั่นสะเทือนของกลไกทางกลศาสตร์, การครอบครองที่มีพลัง
หุ่นยนต์ควบคุม เพิ่ม 30/11/2555
ขั้นตอนของการพัฒนาและการใช้ประโยชน์จากแหล่งสะสมแนฟทา การรวบรวมและขนส่งผลิตภัณฑ์ Sverdlov ที่ตระกูล Loveno วัตถุประสงค์ของสถานีสูบน้ำเพิ่มแรงดัน หลักแผนภาพการไหลของกระบวนการ หลักการทำงานของปั๊มซับเซ็นเตอร์แบบหน้าตัด
งานหลักสูตรเพิ่ม 27/03/2559
การออกแบบท่อส่งก๊าซและน้ำมันหลัก การเลือกเส้นทางสำหรับท่อหลัก แผนภาพเทคโนโลยีของสถานีคอมเพรสเซอร์พร้อมปั๊มแรงดันต่ำกึ่งกลาง การดำเนินงานที่สมบูรณ์ของสถานีสูบน้ำและชิ้นส่วนเชิงเส้นของท่อส่งน้ำมัน
งานหลักสูตรเพิ่ม 17/05/2559
ลักษณะของการออกแบบสถานีสูบน้ำมันและเครื่องชดเชย สาเหตุหลักของปัญหาที่เกี่ยวข้องกับการสั่นสะเทือนเกี่ยวข้องกับการสั่นสะเทือน การพัฒนาแนวทางในการลดการสั่นสะเทือนโดยการนำตัวชดเชยเลนส์สากลแบบเบลโลว์เข้าไปในท่อปั๊ม
งานประกาศนียบัตรเพิ่ม 05/16/2017
การวิเคราะห์ความซบเซาของหน่วยปั๊มเจาะแบบแท่ง (SSPU) ในเหมืองสมัยใหม่ โครงการจะเพิ่ม ShSNU การออกแบบ การเลือกอุปกรณ์ ปั๊มแท่งเคมี วัตถุประสงค์และพื้นที่อบแห้งที่แนะนำ ลักษณะของแท่งดูดหุ่นยนต์
หุ่นยนต์ควบคุม เพิ่ม 19/01/2559
การจำแนกประเภทของสถานีจ่ายก๊าซ (GDS) หลักการทำงานของ GDS คือการออกแบบเฉพาะบุคคล แผนภาพเทคโนโลยีของ GDS บรรจุบล็อกของแบรนด์ BK-GRS-I-30 และ GDS อัตโนมัติของแบรนด์ AGRS-10 การครอบครองสถานีจ่ายก๊าซโดยทั่วไป


