機敏な子供をポンプでくみ出すために開かれている最も実用的な付属品の中で、最も実用的なものは集中型ポンプです。ロボットユニットの原理により、ユニットに高用量の軽い圧力が確実に追加されます。
カントリーハウスへの給水やプライベートブースでの自律給水システムの編成に使用できる多数のポンプとポンプ場が同じタイプで使用されています。
セントリックポンプの特性
タービンを通過するとき、水はシャフトに落下し、チャネル10を通過し、メイン貯水池の容積測定ビトラトミール11を通過します。 タービンのシャフトは、タービンのビジョンであるドライブ15の発電機のシャフトとの追加のばねカップリングを備えている。 発電機の設備は、電気ランスに接続されている設備16の抵抗を変更することで変更できます。 タービンの必要性は、モーターギアボックスによって駆動されるレギュレーター0の出力の変化の速度によって調整されます。
いくつかのステップについて
ヘッドパイプ4に取り付けられたvikorstannyam風袋引きノズル5からの流れへのviznachennyaの流動性のために、バイス6はバーの表示とともに差動センサーのカメラに接続されています。 最初の硝子体のノズルに万力が落ちたら、タービンを通る流れに硝子体を置きます。
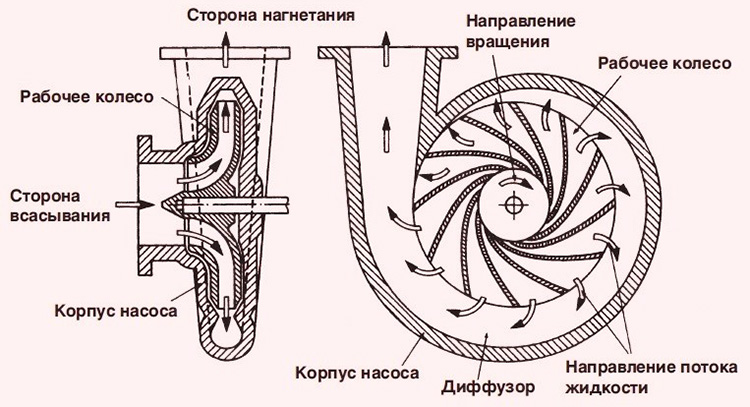
![]() 最も単純な形の集中ポンプの作動部分は、中央シャフトから取り外されたスリーピーススパイラルまたはスパイラルと中央シャフトに固定された作動ホイールを備えたハウジングに格納されています。
最も単純な形の集中ポンプの作動部分は、中央シャフトから取り外されたスリーピーススパイラルまたはスパイラルと中央シャフトに固定された作動ホイールを備えたハウジングに格納されています。
ホイールシャフトへのラッピングの転送は、追加のキーの背後にあります。
価格は、タービン入口に取り付けられた圧力計8、作業室に接続された真空計7によって示されます。 休耕を開始するために残っています。 ヴィンはスケールを読みました。 タービンシャフトへの圧力。 バイプロベーションは、追加のくさびのようなシャッターに使用できる一定のグリップで実行する必要があります。 調整体の9-10の開口部の場合、7? 冬のクロッカスで最小から最大まで8nautazhen。 皮膚レジメンを確立するために、頭の値と矯正、および回復の値が変更されます。
ロボックホイールは、2つのディスクとそれらの間に固定された1セットのブレードから格納されます。 肩甲骨は湾曲しており、ゴツゴツした側がまっすぐなラップの後ろにあります。
ポンプケーシングは、バガテックモデルのスチール製またはチャバンのロボットホイールから作られています。特に、ポリマーから作られた、サイドサイドの給水用です。
図では。 2є教育的普遍的機能
pіdrakhunkuがvimіryuvalnyの添付ファイルを示す体制のochіkuvannіの確立において。 結果はおおよその表に表示されます。 
2ストロークタービンの普遍性
トピック:垂直タービンの電源ペルトン。 タービンの普遍的な特性を誘発するための右から右へ。作業ホイールのシャフトは、ダブルヒンジまたはカンチレバーにすることができます。 ベアリングは支援大学に設置されています。
シャフトのシャンクがボディから出て、補助クラッチの後ろで電動ローターまたはドライブに接続されているディーゼルエンジンのシャフトとチャリンという音を立てます。
シャンクがシャフトを通過するポンプケーシングの開口部は損傷がなく、パイプの流れをポンプで汲み上げることができます。
研究所は、スタンド№1「Pelton-Turbini」で開催される権利があります。 ステップは自動化されており、手動と自動の2つのモードでpratsyuvatiを使用できます。 タービン入口のパラメータは、メインタンク1からの水であり、万力ラインにポンプで送られるセンターポンプ2で提供されます。 シャッター3のパラメーターを調整するには、バルブをポンプに設定します。 タービンを通過するとき、水は大きなビトラトミール14に上昇して流れる。 vimirを閉じるには、通常はロックを開きます。
センターポンプを振動させるときは、エンドツーエンドのシャフトからモデルを駆動する方が美しいです。 Vonoєbolshは、スタッフィングボックスの下、上、何歳になりますか。 さらに、ローターホイールのシャフトが変更されたとき、またはそれが振動したときに、フロントエンドをハウジングの締め付けに対して固定することができます。
![]()
1時間の間、水はメインタンクに変わります。 タービンシャフトには、タービンシャフトをロックするための油圧ギャルとして使用される2段ポンプ10を備えた追加のスプリングカップリングが装備されています。 ポンプポンプが濡れてオイルタンクに付着します。 タービンの速度の変化の結果として、ポンプを通る流れは、追加の調整されたスロットルバルブ12のために変化する。 yogo vantazhiv タービンは、減速機によってもたらされるヘッド0の開口部へのワームホールによって調整される必要があります。
高流量の場合、標準ノズルの追加の背後にあるビトラティを使用することが可能です。 ここでは、差動バイスの再変換を示します。 vikoristevimіryuvachボリュームvitratiのために。 keruvannyaの振動するryvnyaのサイズは流れから振動していますか? 改善の世界では、時間の精度が低下し、より速くなります。
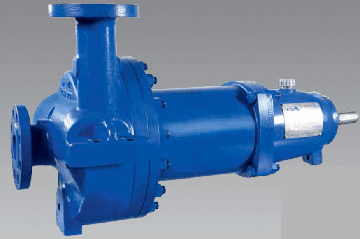
センターポンプのVlashtuvannya
水は、または中央でさえ、ハウジングの前部の中央にある開口部を通ってポンプ室に到達します。 上部のスムーズな接続によって構築され、船体のフィット感が向上します。
ポンプを表す主要部品(ケーシングとドライブ)は、ユニットの操作なしで、ブール値がねじれたり、使用するのが不快になったりすることなく、デリバリーセットに含まれています。
平均化する価値があるため、精度を変更するために分解されます。 タービンマニホールドの入口に設置されたバイスのセンサー7の追加表示を開始する必要があります。 11番目の値のコントロールパネルのコントロールパネルを読み取る必要があります。
偽の預金。 DOSLІDZHENNYAは常設の副官と一緒に実行されます、制御システムと7の上に立つ方法は? 直接別館に8つの開口部。 調整されたスロットルの追加の後ろに、12のシステムとkeruvannyaが最小から最大まで7×8の設定からインストールされます。 タービン全体の振動に張力がかかり、ローターホイールは一方向にしか回転せず、流量が変化しても流量は変化しないため、皮膚の病変に対して1回だけ滞在することが重要です。
- ふるいフィルター;
- vmoktuvalnoyメインライン用のzvorotnyバルブ。
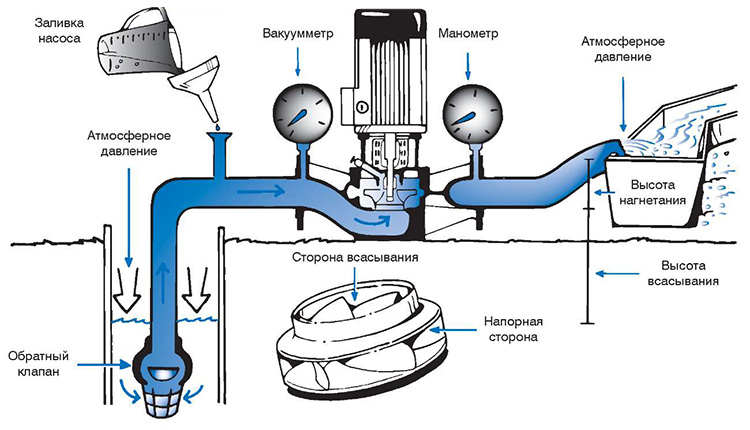
- 吸引(分岐パイプの前に立つので、濡れます);
- 真空計(作業室入口の供給ステップの制御を可能にします)。
入浴用のポンプを飲料水を供給するためのバイコリストに移すときは、交換する必要があり、それに接触するすべての詳細は、あらゆる種類の材料から準備されます。 ボディはステンレス製で、ローターホイールもステンレス製またはグラブプラスチック製です。
ポブドバ機能
結果は標準テーブルに表示および表示されます。 
さらに、動作特性は、1メートルの速度の3つの値(低い値と高い値の最適値)のユニバーサル特性の横方向のオーバーライドを超えます。
ペルトン水車の普遍性
トピック:水車の性能の設計
右のメトユは、ロボットの新しいモードとモデルのハイドロタービンの場合の収縮効率の1メートルのスコアリングされた出荷の値です。 実験室には、実験室のタービンスタンドの外板をチェックする権利があります。 スタンド3「Subvijnіturbini」について以下に説明します。
要求されたєモデルを、その真ん中にステンレス鋼のタブが取り付けられた、おしゃれな「空っぽの」素材のケースでお届けします。
そのようなユニットは、より安価なステンレス鋼になります。 低コストで修理が少ない:摩耗したタブを交換するのに十分な交換品で本体を交換します。
2ストロークタービンモデルの特性が調整されました
ワインはベンチからスタンドまで数えられます。 それは、ラッピングの公称周波数から公称周波数まで始まります。 境界線の幅を1m?、xv-1で結んだ。 静かな開口部自体0の場合、最適なラッピングモードがインストールされます。 また、設定の動作モードとして、ラプトのモデルタービンが鮮やかで、周波数の変化を最大時間で制御します。 
ウォーターボトルvidiєあらゆる給水システムの最初のワニ。 現在、スケール、地上、表面、または精製水の表面にかかわらず、市場で入手可能なポンプソリューションがあります。
dіїの原則
駆動モーターを始動するために、ポンプシャフトは、新しいホイールの取り付けから、向きを変えます。 ホイールのブレードはしわくちゃになって回り込み、作業室にあります。
ヤク・ティルカ・リディーナが賭けで崩壊し始め、あなたは権力の中心に、まっすぐに中心に注ぐようになります。 さらに、モジュールは、ポンプで汲み上げられ、ラッピングの中心に向かってシフトする中央の分子よりも強力です。
1時間でdzherelから水を供給するまでの剛性、ポンプシステムは経済的に効率的で効率的であるため、中断することなくロボットに固定でき、エネルギー効率が高くなります。 ほとんどのウォーターポンプは、完全に機能するまで設置されていますが、ほぼ1時間以上、悪臭は通常の設置では機能しません。 したがって、ポンプの流れには、シャットオフバルブ、またはそのzupinkaを開始するためのタイマーが必要であり、強制非同期モーターを開始することはできず、多くの場合、ライザーを通る高いストラムを介してzupyatyatsyaを実行します。
ロボット中心ポンプの原理
最後のステップは、作業ホイールの周辺を確認することです。次に、ビグヌティアで、vyhidブランチパイプが燃焼します。 そのようなランクでは、グリップは、見たところ、中心力のラクフノクを押すための圧力線の猛攻撃です。
問題を解決し、ウォーターポンプのポンプの頻度を変更するための最良の方法を見つけるため。 ロトモダイナミックポンプの原理と理論によれば、硝子体のラッピングの頻度の変化に伴い、線形変化、二次グリップ、および三乗の法則に対処するための努力がもたらされることがもたらされました。 たとえば、変更可能なストラムの動きは公称性能の80%であるため、51、2%になる圧力が予想されます。 周波数を再変換するZagalomは、機械的な無駄と中央とホールの無駄が見られる場合、エネルギー節約の最大40%を節約できます。
分類
ポンプの種類は、低符号に分類できます。
いくつかのステップについて
- ワンステージパーツ:1つのホイールのみを失う可能性があります。 Tsia konstruts_ya、ヤクvvazhaєtsyaクラシック、Bulaはヴィスケによって説明されたと伝えられています。
- Bagatostop_inpart_:大きなグリップを開く必要がある場合は、ポンプと停止を同時に行ってください。 悪臭は、ザルニーシャフトに植えられたロボットホイールのスパイクに設定されています。 頻繁なセンターポンプのロボットによるアクセスの原則:スキンホイールとその作業チャンバーが同時に亀裂を生じます。 ポンプの本体は、水が出口分岐パイプの届かないところにあるステップから最後のステップに移動する、または移動しないようなランクにあります。 激しい猛攻撃があると、かなりの圧力がかかる可能性があり、皮膚病変を発症する可能性があります。
ラッピングの軸で
- 横軸付:最も人気のあるタイプで、サービスのシンプルさで説明できます。
- シャフトの垂直ロゼットの場合:これらのポンプは取り付けスペースよりも小さく、ロゼットの破片が本体にあります。 たくさんのタイプがあります ドリルドポンプ、stislikhの心の終わりにpratsyuvatiを持って来るyakim。 フィールドの特定の設計の欠如は、建物のサービスの修理のために、dvigunの知識がしばしばもたらされるということです。
 自律給水を確保するために、最も頻繁に行われるのはボアポンプの揚水です。 ユニットを振動させるときは、パラメータを安全に保つことが重要です。 私は計画があります 最良のオプション意思。 スプリングを落としたドライラン中のシャットダウンを確保し、設置の簡単な操作を保証する自動化。
自律給水を確保するために、最も頻繁に行われるのはボアポンプの揚水です。 ユニットを振動させるときは、パラメータを安全に保つことが重要です。 私は計画があります 最良のオプション意思。 スプリングを落としたドライラン中のシャットダウンを確保し、設置の簡単な操作を保証する自動化。
また、ポンプが Zvorotn_y zv'yazyk簡単に手が届くコントロールバイス付き。 ロボットの基本原理は周波数の視覚化よりも美しいので、ポンプロボットの基本原理を確認することをお勧めします。 センターポンプのロボットモードは、変動性の特性をシステムの特性で覆すことに基づいています。 ポンプシステムとは、貯水池、オフラインパイプライン、施錠および調整設備の蓄積を意味し、ポンプから一度に大量の水の輸送を防ぎます。
水のグリップを動かすためにポンプが必要なものについては、をお読みください。
川の真ん中からブースに水を届けて街に水をやったり、水をやったりする必要がある場合は、Strumokポンプに行きます。 緊張すらしていない人にとっては重要ではありません。そのような最小限の機能で、彼らは収まることができますが、価格で遊ぶことができます。 ここでは、ポンプの特性と動作に関するすべてを見ることができます。
ゼロ価格で必要なGarnituraは、 静的グリップ..。 これは、ポンプが流れから直接水を供給するか、ロボットが長期的な強度に必要な水を供給する役割を果たしているためです。 ポンプと油圧システムの特性を再調整すると、ポンプシステムの物理的または建設的な作業ポイントに適用されます。 現時点では、ポンプのグリップはシステムの無駄によって引き起こされています。
ペレチンは、ポンプが可能な限り効率的に作動するように振動を開始します。 多くの 油圧システムプロジェクトの考え方に依存しないでください。 スロットルシャッターによるケルバニヤのシステムは、給水システムに使用できる中央ポンプで広く使用されています。 システムのグリップを押すrakhunokのBazhanavart_stリーチ。 まず、ポンプを通常のロボットに移動させるために、再絡み合った動きをクリーンアップする必要があり、システムの周波数は明らかに低いです。
確立する方法について
- 上:razmіschayutsyabіlyadzherela、または他のすべてに基づいて。 より安価に、常にuvazで見つけられ、視覚的な制御とサービスのために簡単にアクセスできます。 不完全:dzherelの水位は、ポンプの設置前に少なくとも8 mの過負荷の罪を犯しているため、傾斜した井戸や開口部からのいかなる種類の組み立てもあり得ません。
- すぐに使用可能:垂直ローターシャフトを備えたポンプ。 Vstanovlyuyutsyaなので、軍団の一部はDzhereloの近くに埋葬されているようです。 ピットからの最も豊かなスピーチの勝利のために停滞することは最も一般的です。
- Zanuruvalny:大きな粘土と開口部のある井戸では、ケーブルまたはランチュグに吊るされているため、ポンプがブロックされています。私は水に上がります。

ドロップの段階は、集中ポンプの特性とパラメータのインジケータに基づいており、特定のタイプで到達する可能性があります。 PSの特性の変化に関連する補正の変動性の値の決定。 スリーウェイシステムとケロバンは、バイパスを介してポンプ出力への一定のグリップを提供し、水を元に戻します。 規制が解除され始めたその時、ポンプの寿命とエネルギー供給が圧倒され、無駄に減らすことができます。
周波数制御。 周波数の再変換をポンプのdvigunに接続し、流動性と流量を調整して、変動特性の変化に対応します。 Tseiメソッドはperevagiなしで使用できます ポンプシステム広い範囲で生活を変える必要があります。 下の副で硝子体に到達する必要があります。 ポンプの耐用年数を改善し、作業ホイールの摩耗を減らし、システムの騒音を減らすことができます。 より低い借方で大幅に減少したいという衝動。これにより、ビクトリア朝の再革命の頻度を節約することができます。
上部に取り付けられた循環ポンプ
電源を利用する残りの方法を確実にするために、ユニットは次のデカールを作成する罪を犯します:
- すべての新しい要素は腐食に耐性があるかもしれません。
- 気密性はヤクケース、および電気部品にすることができます。
- ポンプと折りたたみの設計は、井戸から見ることができる、またはさらに高価なエンジンオイルの循環の増加によるものです。
Zrozumіlo、そのような心のために、ポンプは表面のためにより高価になります、しかし他の方法で大きな山から水をとることは不可能です。
浅い深い穴(最大25〜30 m)のVlasnikiは、妥協案のオプション、および表面モデルとボアモデルの交差を推奨できます。
ワインテクターでポンプに行きます。 ポンプ自体はさらに手動で上向きに上昇し、2番目の部分である発光体は穴の上部でより深いところまで下げられます。
水を取る方法の後ろ
- ポンプの通常の湿り度:タイプ全体に、すべてのポンプが供給されます。また、水が自己燃料で供給される表面からも供給されます(たとえば、下部にある蛇口でタンクから水を汲み上げる場合)。 最初の起動の前に、空のユニットを水で満たす必要があります。
- Samovmoktuvalny:ポンプ自体は、歌う水から水を引き出すためにそう呼ばれています。 理論的には10.34mの価値がありますが、実際には8mは変更しません。 残りは、ディストリビューションを介してスクイーズに渡ったarmuvannyaの母親の罪を犯しています。
自吸式ウォーターポンプ-ロボットの原理
同じロボットのセルフポンプポンプを可変モードで起動する バタフライバルブすべての行で。 1時間の充填後、短い休止で、ロボットはロボットによって水を排出し、ウォーターストッパーは充填の準備が整います。
それらのすべてではありません ポンプ場キットのメカニズムを説明します。 そのようなランクでは、「より低い、より低い」という価格の命題がトリックに見られます。
入力ノズルと出力ノズルのロゼット用
- クラシック:上部で説明されているように、吸引パイプと供給パイプ:最初に-前面(中央)に、もう一方-上部に。
- インラインタイプのポンプ:パイプ(ウェットとドライ)を不快にさせるさまざまなモデルから見ることができ、同じ軸で焙煎されます。
有毒で化学的に攻撃的で不安定な流体を汲み上げるために、もう1つのタイプのポンプが設置されます-密閉された集中型ポンプです。 悪臭は、それがポンピングされることができるように、スピーチの順番が絶対に不快になるように設計されています。
vikonannyaには2つのタイプがあると思います。
- ローターをボディの中央に移動し、ローターホイールをヨーシャフトに取り付けます。
- モーターは別のビューアーにあるViconaneの完全に密閉されたケースであり、回転可能なモーメントの作動ホイールへの伝達は、追加の磁気カップリングの背後にあります。
セントリックポンプの特性
 ポンプの動作パラメータє:
ポンプの動作パラメータє:
- 骨の折れる作業が再開されました(W)。
- 生産性(立方メートル/年またはl / hv);
- vyhodіのグリップ、あなたは自分自身を猛攻撃と呼びたいです(止水メートルのvimіryutsya、速度-m.w.st.)。
現場でのセンターポンプの特徴は、ポンプの効率が圧力下に保たれるという事実にあります。
さらに重要なのは、高所で運転するためのユニットの開発です。または、優れた油圧サポートを備えた大きなパイプラインを介してポンプで汲み上げることができます。この少量の水を1時間で汲み上げることができます。
Ridinaは、shvidkistu vから、センターポンプの作業ホイールに軸方向に持ち上げられ、シャフトの軸上に直接配置されます。 作業ホイールでは、直線の直線が軸から半径に変化し、軸に垂直にシャフトに変化します(図2.7)。
ロボットホイールのチャネル(シャベル間のスペース)では、チャネル内の速度v 1を通過して、ホイールからの出口に移動する方法があります。値v 2(インデックス "1" "-vyhodіznyogo)。
ロボットホイールのチャネルを変更すると、ラインの小さな部分が折りたたまれます。転倒したホイールは、円周速度がプログレッシブであると同時に、速度wのシャベルの上にあることがよくあります。 潜在的に、流動性は指定されたポイントでシャベルの表面に正確にまっすぐになり、周囲の流動性はポイントが存在するポイントまで正確になります。 作業ホイールの出口での円周は、u2 =π* D2n de D2-作業ホイールの直径mです。 nは、ホイールラップの頻度s-1です。
数学を簡単にするために、距離は確かに、ストルメネフの作業ホイールの線の崩壊と、崩壊する真皮粒子のトラクトリーが、シャベルの輪郭とともに崩壊することです。 このような追加料金に基づくビザの結果として、国の本当の破滅が破壊されるように、是正(パフォーマンス)を行う必要があります。
出生線の絶対的な柔軟性はv = w + uです。
その上、絶対的なshvidkostivのラジオと倉庫の周辺についての理解を紹介しました。 ラジアル倉庫の絶対容量(子午線容量)vr = v sin a、
de a--kutmіzhは、rіdiniのシャベルの粒子の邪魔にならない点で(それへの入り口のために)コーラまで絶対にshvidkіstyuvіdoticです。
倉庫の面積は絶対に柔軟ですv = v cosa。
より多くの訪問者のために、vugilyaについての理解を紹介することも可能です-シャベルからのリディーニの部分(またはその入り口)のポイントまで、寛大なshvidk_styuを備えたvugilya。
基本的に、グリップの可視性を可能にする集中ポンプの操作、またはそれとともに発生する猛攻撃は、次のように定式化された、数分で瞬間を変えることについての悪意のある定理であると言えます。 マテリアルポイントシステムの開発の結果として。
Zastosovyuchi tsyuの定理は、ポンプのロボカッシュホイールを通るラインが崩壊するまで、確かに、油圧入力なしで上昇します。 1秒でマシリディーニのルーチが曲がる瞬間まで明らかです。 リディーニの質量が大きいので、ロシアの運命に注意してください。倉庫m = pQ(pはラインの幅、Qはポンプの流量です)。
オーバーラン全体で急速過負荷が発生した場合の入力オーバーランでの作業ホイールの軸までの崩壊の瞬間v1:M 1 = pQv 1 r1。
作業ホイールの出口での破壊モーメント:M 2 = pQv 2 r 2 de r1およびr2-ホイールの車軸からトラフィックの入力および出力のベクトルへの出口。
強さの瞬間の合計:
![]()
振動は図に似ています。 2.7
それから
同時に3つのグループの呼び出し力があり、作業ホイールのチャネル間を記憶します。3つのグループの呼び出し力があります。重さの力、バラ色の中断(入口-出口)でバイスを絞る、および側面からです。ロボットホイール、および表面のエッジを強制的にこすります。
力のモーメントをゼロにするのは難しく、力の肩がゼロになるのは困難です(車輪の吊り下げを通過する悪臭)。 力の瞬間は、同じ高価なゼロの原因からrosrahunkovyhpererezahの悪にあります。 Oskіlkiはnehtyuyutをこすり、次にdorіvnyuєをこすりつける力の瞬間をゼロにします。 車輪の車軸が回転するときの持続的な力の瞬間であるOtzheは、新しい車輪を通過する道路へのロボット車輪の動的噴射の瞬間Mk、tobtoに持ち込まれます。
ポンプによってフラッシュされたrtの理論上の悪徳にビトラティをもたらすために、適切な速度のために、作業ホイール、すなわちE. DobutokMkによってラインを転送する必要性。 Otzhe。
urahuvannyavirazіv(2.6)と(2.7)іvnyannya(2.5)を使用すると、viglyadіで支払うことが可能です
睡眠時間中の輸送可能な速度
![]()
ryvnyannya(2.8)の値を送信し、この部分の違反をOに配布すると、次のことができます。
ヤクvіdomoshіdravlіki、副H = p / pgまたはp = pgH。 rivnyannya(2.9)の価格値を提出した後、
堆積物(2.9)と(2.10)は、ショベルポンプの主な条件と呼ばれます。 Rivnyannya(2.9)および(2.10)は、こすりたくないという心から、悪臭は理論上の万力の停滞またはポンプが作動ホイールの主なパラメータの観点から発生する圧力を表しているように見えることから、vivedeniです。
入口と出口で輸送を行う軸流ポンプの場合、同じ、等しい(2.9)
大型ポンプのロボットホイールの場合、半径方向(a1 = 0°、u1 = 0)に近づくのが実用的であるため、(2.9)と(2.10)は別れを告げて目を満たします。
![]()
集中型ポンプの主なパラメータは、理論上の悪徳、たとえばポンプによって開発できるものが、作業ホイールのより大きな円周よりも大きいため、同じ直径よりも大きく、周波数がラップされていることを示していますローターホイールショベルの約2.7「クーラー」ロゼット。
操作上の万力は、たとえば、理論的ではないポンプによって開発されているため、実際の心として、ポンプのロボットは、開発中に取られた理想から開発されています。 ポンプによって開発されたバイスは、ローターホイールのシャベルの数の終わりに、ラインのすべての部分が等しく見えない場合、絶対的なものを介してヘッドランクによって変化します速度が変化します。 さらに、エネルギーの一部は多くの油圧サポートに費やされます。 シャベルの終了数の流入は、v2uの値の変化を特徴付ける補正係数kの損失にフォールバックします。 政府の不適切な返還のグリップを変えることは、政府の政府会議の未処理分に戻ります。
修正の改訂に伴い、新しいグリップがあります。
再猛攻撃:
性能nの値は、ポンプの設計、その寸法、およびホイールの流動部分の内面の品質に基づいています。 境界でのn値の名前は0.8〜0.95です。 6から10までのシャベルの数のkの値、a2 = 8/14°およびv2u = 1.5 / 4 m / sは、0.75から0.9に増加します。


