給水システムに接続されていない個室の生徒には、独立して給水が提供されます。 最良の選択肢-井戸からの自動給水。 これにより、家族と一緒に暮らすための快適な心を作り、バケツで常に水を運ぶ必要性を軽減することができます。 デザインを選ぶとき、dzherelaは飲料水から水を消費するために滑り落ちました。 KrynitsyaはSverdlovinaよりも安く、自分の手で滞在し、10年間サービスを提供する方が簡単です。 食料の価格に違反した場合、右側には井戸の一般的な自動装置の設置が奪われます。
krynitsyaは審美的に設計されています-プリブディンカの領土の奇跡的な装飾。
Chim zruchna krinitsya yakdzherelo自律給水
duzhe zruchny yak dzherelo vodiの小さな(最大15 m)井戸。 ポンプが故障した場合、電源を入れておくと助かります。 井戸水の近くの家の数は、北の真ん中の家の数よりも少ないです。 Tse z tim、地面に若い層で水zalyagєをscho。 それがvipadであるかどうかにかかわらず、それをきれいにする必要があります、または、井戸を使用するとき、フィルターはそれほど速く詰まりません。
スヴェルドロフスク地域では、出芽井戸は安価で低く、ロボットの穂軸の場合、適切な文書を作成する必要はありません。 井戸からの自律給水システムは、整備、修理、解体が簡単です。 明らかに、含水ボールのグリビナは非常に小さいので、すべてのペレバギは同じようにのみ重要である可能性があります。 doyakyh dilyankasでは、ドリル穴は利用可能な唯一のdzherelvodiの1つです。

プライベートブースの中庭に自動給水するクリニツァ
スキームと給水を選択するために必要なvrahuvatipid時間
Schobは、プライベートブースの給水方式を正しく振動させるため、次の要素を使用する必要があります。
- Rivn vody
実際のところ、揚水に適したタイプのポンプを置いてください。 地上から水面まで8m以内の場合は、ポンプ場または水上ポンプを設置することをお勧めします。 大きい-モデルがカバーされています。
- Doboviy obsyag vodozhivannya
ポンプ設備の圧力の振動を注入するTsei基準。
- dzherelaから来て、ブースまで車で行きます
- 取水回数
ポンプモデルが正しく振動し、すべての供給ポイントでドライブの正しいグリップが確保されるようにするには、すべての要素が必要です。 悪臭はシステムに接続されているため、これも重要です。
- 水の供給の季節性
このシステムが夏の別荘に設置されている場合、人々は夏の期間にのみ住んでおり、鐘や笛に目を向けることができます。 ブースに恒久的に住んでいる場合は、パイプラインを地下に敷設し、断熱する必要があります。
rozrakhunka gibiniroztashuvannyaパイプラインvrakhoyuyutrivnfreezingґruntu
自律給水システムの主な要素
給水システムのRazroblyayuyuスキームでは、大規模な作成が必要であり、システムの主要な要素とその前の開発を意味します。 したがって、タイプだけでは、コンポーネントの数を開発する方が簡単です。 システムは正常に機能し、手動で操作されます。次の要素を接続する必要があります。
- パイプルーティング用のコレクター。
- 「ドライラン」という悪徳を中継します。
- ハイドロアキュムレータ;
- フィルター;
- dilyantsiのブースの取水ポイント。
- ブースをお湯で固定するためのボイラー

自動給水を備えた坑井エリアの詳細図
井戸用ヤクビブラートポンプ
3種類のポンプが利用可能です:
- 表面的。 ポンプは、重要な水、井戸、および小さなグリビンの頂点から水を汲み上げるためのバイコリストタイプです。 匂いは歌の途中で飲むのに耐えるのに良いです、他のsmitty。 ステンレス製の作業部品を備えたモデルを選択する方が美しいです。 研磨剤に耐性のあるtsey材料。
- Zanuruvalny。 付属の円筒形で、グリビーニから最大8mまで水を汲み上げるように設計されています。
- Sverdlovini。 大山(200mまで)から水を汲み上げる排水ポンプがたくさんあります。 頭上の頂点用のポンプ、高度な、鋼製の既製、高度な技術。
非グリブラインの場合、表面ポンプがあります。 一部のモデルでは安くなります。 インスタレーションを振動させるときは、馬車を道路脇に置く方が美しいですが、ポーズは家にあります。 ロボットのピッドアワーとポンプタイプの特徴的なノイズ。 骨の折れる場合、水の消費量の中間の指標で成長することが可能です:一人あたり1m3 /年プラス夏の期間の30%。

浅井戸用地表ポンプ
ポンプ場-小さな故郷のためのオプション
このシステムは、表面ポンプと内蔵のハイドロアキュムレータからの保管の準備ができています。 一方で、それはまだ便利で、ハイドロアキュムレータを取り外す必要はありません。 іншогоから-駅はzdatnapovnotsіnnoで、水が少数の人々(1〜2人)を奪うのを防ぎます。
ステーションの唯一の不足は、標準的なハイドロアキュムレータの全体として少量です。 私は自分の名前を50年変更しません。 明らかに、もっと起き上がることは可能です、あるいは結局、ポンプを買うことはより安くなるでしょう。 したがって、ポンプ場の設置は、大量の水路で消費されることの少ないバッグやサマーコテージの数が少ないビジネスにのみお勧めできます。

ポンプ場-手動ですが、実用的ではありません
Yakyタイプの配管はより美しいです-コレクターchi最後
給水管は、最後と並列の2つの方法で敷設できます。 共通のガスケットには2つのタイプがあります。
- Poslidovna
水はメインパイプラインにあり、取水口のポイントは最後に接続されています。たとえば、真皮の攻撃バルブでは、水は弱くなり、前部が低くなります。 価格は、モンタージュオプションの場合、小さな家族でも簡単ですが、最も簡単です。 2つのクレーンをナビゲートするための1時間のvictoriannyaが重要です。
- コレクタ
ガスケットのすべてのタイプは、スキンポイントの接続を周囲のパイプへの取水口に転送しています。 このようなシステムの設置には、追加のコンポーネントが必要になり、蛇口の水流は安定します。
ただし、配管の種類によっては、取水口のポイント数と1時間の登録が必要になります。
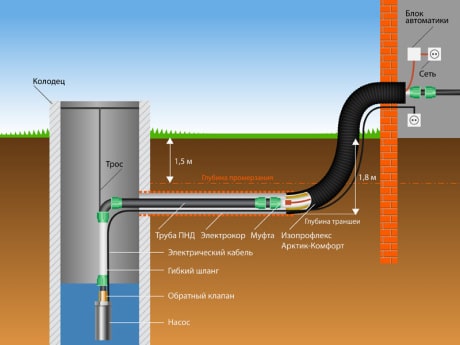
井戸からのプライベートブースのヤクオルガニズヴァティ給水
まず、1時間の自律給水を構築する必要があります-パイプを敷設するためのvicopatiトレンチ。 悪臭は、ラントへの凍結のレベルより下でroztashovaniであるという罪を犯しています。 Fakhivtsiは少なくとも1mの深さを掘ります。私は、パイプとポンプケーブルを溝に敷設する準備ができています。 ケーブルへのDovzhinは40mになり、zzvychayїїvistachaє、必要に応じて、積み上げることができます。 トランペットを外に出してみましょう。金属製のトランペット-音、なぜブースでポドロジの開口部からトランペットを導き、周りに広げなければならないのですか。
システムの前に、リレーとポンプケーブルを接続する前に、virobnikの推奨事項に従ってください。 パイプ用のアダプターのように、リレーバイスをタップします。 ポンプケーブルはハリネズミまで接続する必要があります。 最適なオプション-新しいオクレムのソケットを差し込んで、マシンに取り付けます。
ポンプ自体の設置は難しくありません。 Poverkhnevіvstanovlyuyutは井戸の間でポーズをとります。 zanuruvalnyは、建物内の特別な空気を通過するケーブルの水によって下げられます。 Yakshovikoristovuєtsyaはzanyuvalnayaモデルで、キルトにする必要があります。すすり泣きは井戸の臭いを突くことがありませんでした。 ポンプの故障を引き起こす可能性があります。

zanuruvalnyポンプを設置するには、井戸に降りる必要があります。
給水システムは、運河から1時間で設計されています。 また、多くのポイントを備えたセルフスタイルの折りたたみシステムを作成することも可能であり、取水と給水は克服するのが難しい場合があります。 そのような場合、完全なセットを正しく選択し、専門的にシステムを調整するので、実験するのではなく、障害に目を向ける方が美しいです。
説明:
水輸送の技術プロセスの効率を改善し、電気エネルギーの硝子体を減らし、給水と給水を改善するためには、給水と運河を防ぐ施設の自動化が必要である。 統計では、アルテシアン上流と取水ステーションの自動化を見ることができます 産業企業、およびzhitlovoブースへの給水のための制御スキーム。
給水システムの自動化
水輸送の技術プロセスの効率を改善し、電気エネルギーの硝子体を減らし、給水と給水を改善するためには、給水と運河を防ぐ施設の自動化が必要である。 stattiは、職人の頂点と産業企業の取水ステーションの自動化、および給水ブースの取水スキームを調べます。
給水と運河化の現在のシステムは、スポルド、メカニズム、および機器を折りたたむコストであり、それらのすべての部分は、効率的に誤動作することなく正確に行うことができます。 それらの前に、給水システム、浄水場、別棟、サービスステーション、ポンプ場による給水と運河が運ばれます。
これらのオブジェクトでは、水力学的、物理的、化学的、微生物学的なプロセスが数多く行われています。 給水および運河システムの主な機能の前に、以下が参照されます。
- 信頼性と信頼性の高いロボットを保証する高レベルのパフォーマンス。
- 常に微細なnavantazhennyaの心のためのロボット。
- 流出する水の水質の変化の結果としてのロボット工学のモードの陳腐化。
- 機器の領土分布と1つのセンターからのロボットの調整の必要性。
- 技術プロセスの柔軟性と高品質の水処理の必要性。
- 最も経済的なロボットとポンプユニットを確保する必要性。
- 緊急時の事故の場合のオフィス配達の保存の必要性。
- 給水および給水システムの攻撃的な大学の自動化が可能です:
- artesian sverdlovy;
- 1番目、2番目のpidyomu、p_dvischennyaポンプ場のステーション。
- フィルターステーション;
- pobudovaファンシーディクテーションポイント;
- 運河ポンプ場と洗浄装置の自動化。
自動化システムは、センサー(副、温度、硝子体)、切り替え、入力/出力モジュール、コンピューターおよび/またはプログラムされたコントローラー、訪問者のアタッチメントなどの要素の開始から保存されます。 リモートオブジェクトから中央ディスパッチングポイントへのデータの送信では、利用可能なチャネルから接続にデータを送信することができます:通信回線、無線チャネル、チャイルドレスイーサネット、 文体リング(GPRS、SMS)、衛星通話。
センサー- エレメント 技術システムアタッチメントまたはプロセスによるvimіryuvannya、信号化、規制、keruvannyaの兆候。
変質したVimiruvalny-変数値を同じ値に変換するための標準的な計測特性を備えた技術的能力、または変換、表示、送信の目的で処理、回復に使用される制御信号。オペレーターの真ん中。
モジュールの紹介/ vivedennya danih-アタッチメント。信号が再構成され、センサーからデジタル形式で送信され、コンピューターまたはプログラムされたコントローラーからデータを送信し、コンピューターから訪問者のアタッチメントにデータを送信します。
コントローラ-電子機器と計算技術の手付かずの管理。 プログラミングロジックコントローラ(PLC、PLC)-産業用制御、電力工学、ZhKG、輸送およびその他の技術システムの接続。 PLC-デジタルコンピュータの専門化、技術プロセスの自動化の代用。 PLCのコンピュータから見ると、デバイスは、センサーへの入出力信号と、 些細なロボットサービススタッフなしで、そして不親切な心のロボットのために dovkilla..。 PLCєは実際の時間に付属しています。
Viconavchy pristriy-得られたコマンド情報に従ってプロセスに注入される自動ケロベーションまたは調整のシステムを調整します。 別館の技術事務所では、再変換を行います。これは、入力信号(電気、光学、機械、空気圧など)を出力信号(すべてラフ内)で変換し、制御ユニットに注ぎます。 このタイプのアタッチメントには、電気モーター、電気、空気圧、または油圧ドライブ、リレーアタッチメントも含まれます。
自噴スヴェルドロビンと取水ステーションのポンプの制御
ビルホロド近郊の麦芽麦芽工場で、アルテシアンスベルドロビンのポンプと取水ステーションを制御するシステムが自動化されました。 ハードウェアシステムは、「OWEN」会社の助けを借りて実装されました。 プログラムの途中で勝利者からビコナンを実装するためのプログラムと、CoDeSys2.3およびCoDeSysHMIの視覚化は明らかです。 「Belgorsolod」企業の領土には、7人の職人Sverdlovinasが設置されました。 上流のchotirsから見ることができる水は、3つの大きな(350 m3)貯水池(水タンク)に溜まります。 Інші産業企業での州ごとの目的のためのvikoristovuyutsyaの3つの頂点(飲料水、衛生的な消費者、芝生への水やり、消防パイプライン)。 貯水タンクの上流の深さからの水。 それらから、取水ステーションにパイプラインへの追加給水用の水が供給されます。 また、取水所には非常用ポンプを設置し、強制通風(高圧)2基と洪水時に悪意のある排水路1基で取水口を目覚めさせた。 Sverdloviniは、数百メートルにわたって表示され、同じものを1つ表示し、400〜800mコードの累積容量まで表示します。
自動システムが手動で実行される前のドリル穴のポンプと取水口の制御。 パラメータの操作上の制御:ポンプミル、水の万力、水の流れと総ビトラ-取水口buvvidsutniyのステーションで。 pidtrimkaのディスパッチャー 必要な等しいすべての頂点とvmikav / vimikavポンプをバイパスし、keruvannyaの追加のコントロールパネルで、累積容量zd_ysnuvavを駆動します。 同時に、国営の24時間体制で、パイプラインのグリップを外して水を汲み上げる必要がありました。また、ポンプをお渡しします。 企業の状態で取水所の食品加工工場を確保するために、5つのスペシャルがありました。
この順序のロボットをインストールする必要はありません。 新しいシステム管理と幅広い心を持って:
- rіshennyamaєbuti安価;
- ドライバーのビデオバットと商品の配送のすべてのプロセスを自動化する必要があります。
- オペレーターは、PCからのすべてのポンプを使用して、keruvannyaのプロセスにリモートで関与できることについて有罪です。
- Sverdlovin、取水所、累積容量からの給水、およびコンピューター上の振動パラメーターのアーカイブにおけるロボットの操作監視の安全性のせい。
- プロセスの記録を保持することが重要です。
テクニカルソリューションの説明
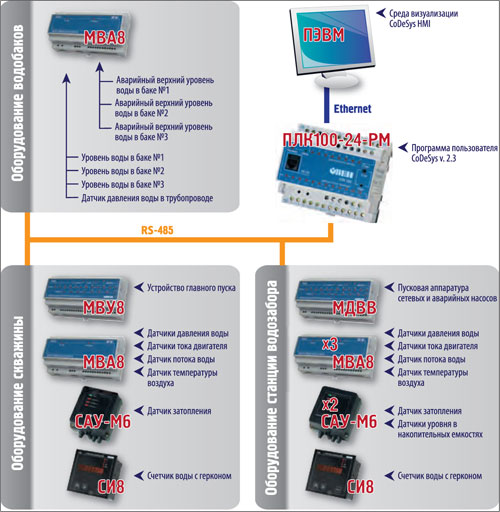
取水所の配水地点は、ボイラー室が目覚めるまで清算・移動され、ボイラー室の運転員に作業の警備機能が割り当てられています。 ディスパッチャには、コンピュータとPLC100コントローラを備えた制御室があります(図1)。 コントローラは、追加のイーサネットの背後にあるPCに接続されています。
図1。 PLC100コントローラーによるShafa制御
次の機能が皮膚の新緑にインストールされています:挿入/ vivodモジュール、インパルス検出器、ソフトスタートスイッチ、4〜20 mA出力のバイスセンサー、および4〜20mA出力センサー。
取水所には、モジュール、パルス検出器、万力センサー、ストラム用センサー、スキンポンプ用モーターポンプ用モジュールが設置されました。 水タンクには、MBA8モジュールと副PD100-DI用のセンサーが装備されています。
ケーブル「vitapara」を備えたコントローラーPLC100は、上部セクションとステーションを1つのpromislovネットへの取水口に接続しました。 敷設されたワイヤーヘッジの1階は1700mに建設されました。2つのRS-485リピーターがヘッジICPに設置されました。
システムの特徴と機能
プログラムはコントローラのメモリにロックされ、CoDeSysプログラムの途中に分割されます。このプログラムは、ST、CFC標準MEK 61131–3からプラグなしで提供できます。 グラフィカルなオペレーターインターフェイスもCoDeSysによって分類されます。 貯蔵タンク内の特定のレベルの水と貯水池内の作動水レベルを供給するためのポンプがオンになり、自動的にアクティブになります。
取水口へのポンプは、給水システムで必要なグリップを提供し、主要なもの、つまり主要なものに従って機能します。 ワイヤーポンプの交換は、均等摩耗レベルから1時間の設定で自動的に行われます。 真皮ポンプの場合、napratsyuvannyaの期間があります(図2)。

小さい。 2.PCでスキンポンプを印刷してから何年も経ちました
コントローラのプログラムは、オブジェクトに取り付けられているすべてのアナログおよびディスクリートセンサーの診断を実行することです。 皮膚パラメータを登録して視覚化するための取り組み:RS-485コールの可視性、シェービング、短いちらつき、4〜20 mAの外出、その間の緊急事態への到達。 センサーが作動しているとき、ディスパッチャーは誤動作の性質に関する情報を受け取ります(図3)。 コーディネーターが制御プロセスに関与しなくなるとすぐに、システムはロボットを通常の制御アルゴリズムに切り替えます。 ストローマセンサーのパラメーターを分析します。たとえば、プログラムは、ポンプが空運転している場合や、ポンプが故障している場合、または参照ポンプに切り替えます。 センサーが故障した場合、プログラムのグリップによりポンプが作動し、水の流れと流れがそれ自体で監視されます。
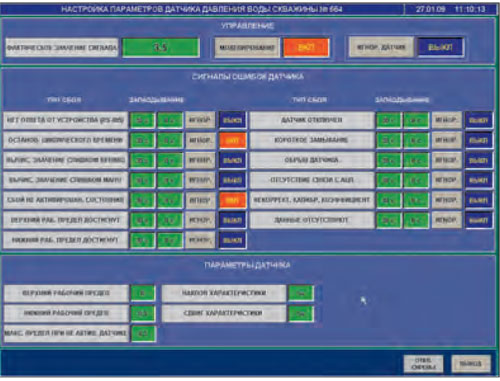
小さい。 3.PCの誤動作の性質に関する情報
このプログラムには、アラームを検出し、システム内のセンサーからの信号を無視する機能があります。 これにより、実際の制御プロセスには関与せず、緊急事態のモデリングが可能になりますが、プロセス全体ではなく、prodvzhuvatipratsyuvatiの重要ではない状況がモデル化されます。 ディスパッチャは、PCモニター(図4)と取水ステーション、貯水池の水位の指標で作業パラメータを読み取ることができます。
- sverdlovinіと給水での水のグリップ;
- Strumdvigun_v皮膚ポンプ;
- 流れるvitrativodiのsumarny;
- ラインミルポンプ:ロボット、zupinka、zb_y;
- ロボット工学の振動モード:自動、リモート、マウス、ブロッキング;
- 累積容量でのイヴニャ(vіdsotkaで);
- 貯蔵タンクの上下の水位;
- パイプライン近くの水の流れの兆候。
小さい。 4.自噴深穴のポンプと取水ステーションによる自動システムとケルバニヤのニーモニック図
keruvannyaの画面では、頂点が次のように表示されます。温度は、目覚め、洪水、燃焼、悪の真っ只中にあります。 ディスパッチャは、リモートコントロールモードをオンにして、ステーション上部のロボットへの取水を制御できます。ポンプをオンにして、ソフトスタートを再開します。 視覚化のプログラムでは、vodiの万力、dvigunのstruma、vodiのmittєvovitra、容量の等しいグラフを見ることができます。
自動化されたシステムとkeruvannyaの実装から効果的
自動制御システムの生産設備では、スタッフの人数が増えています。 ロボットの順序に明らかな変化があります-すべてのロボットポンプとすべてのセンサーのパラメーターを実際の時間で制御する可能性、自噴頂点の生産性、および見ることができるドライブの動作フィールドがあります自噴から。
Zhitlovyブースへの給水のための自動制御システム
会社「Tsentrmontazhavtomatika」の前に、彼は水の供給の難しさについて傲慢だった副官であることがわかりました。 ザミスキーブース自噴sverdloviniから。 穴掘りの時点で、リムポンプを使用して設置するため、オブジェクトにアルテシアンホールが用意されています。 また、ブールの代理には、累積膜タンクと内蔵の自動装置を備えた2つのポンプ場があり、入力バイスに供給されます。
古典的なviglyadの場合、給水システムを図に示します。 5.5。

小さい。 5.5。
排水ポンプPNは、センサーバイスDDの背後にあるshafu keruvannyaSHUを介して給水ラインに適用されます。 ザーティングポンプの頻繁な始動を可能にし、システムのグリップをスムーズにするために、MBメンブレンタンクが取り付けられています。 上部の生産性は水の寿命よりも短いため、上部にレベルセンサーを設置するか、パイプラインにフローセンサーを設置する必要があります。
このような古典的なスキームは、インストールが簡単で、安価で、保守も簡単です。 ただし、客体化されたob'ktaが記述されている場合、明らかな所有物は次のとおりです。
- 30mの開口部の公称モードでの連続排水ポンプ。ドリル穴の深さが22mになったとき。多すぎた(0.7〜0.8 kgf / cm未満?)バイスは明らかに十分ではありません。ブースへの通常の給水。
- 夏期の上部の借方は0.8m3に近いはずです。 Sverdlovinaからの水の更新のための時間。
ポンプをより大きな弾丸に交換するという提案が見られたので、副官はポンプ場のポンプポンプで再びポンプに戻すことができました。 さらに、明示的なブラストポンプの低いパリティと広い幅により、故障した場合に2〜3年で交換することができました。 Vikoristannyaメンブレン 貯蔵タンク MBも悪意があったので、吸引ポンプでdodatkovonavantazhennyaに送られました。
システムの説明
給水が設定されるとすぐに、他の給水システムと同様に、給水システムが採用されました(図6)。

小さい。 6.自噴のポンプと取水ステーションによるケロバンの自動システムの機能図
川の真ん中からのポンプは、1つある貯蔵エリアの端に水を汲み上げます ポンプ場Н1は家に水を汲み上げ、他のН2-は灌漑と技術的な消費のために。 さらに、散水プラントのポンプ場の水は、NBの蓄積されたプールの底まで成長します。 これにより、ロボットシステムとラバの給水の過程でNBの蓄積容量の下部に蓄積を確認したり、さまざまなニーズからプールを空にしたりすることができます。 給水ブースへのVidbirvidiは、下から100mm近くのvidstaniで撮影されます。 ブースへの給水ラインにもフィルターが設置されています。
zhitlovnyブースの給水システムは、自動制御システムが必要になるため、折りたたみ式に設置されました。
PNポンプのドライランを制御するために、DPダクトセンサーが入力に取り付けられています。 ターボポンプの始動から信号が除去されると、PNは3〜5秒で必要になります。 始動後、DPダクトセンサーのミルの制御をオンにします。 時間の終わりにDPダクトセンサーがその接触を変更しないとすぐに、システムは約10分間オンになります。 (穴の始まりの時間)、プロセスが再開されます。 プロセスがすぐに離れた場所で開始され、最初の1時間後にドリル穴が空になった場合は、ダクトセンサーがその接点を閉じ、3〜5秒後になります。 システムvimikatsyaも10分間。 sverdloviniを埋めるため。
ドレンポンプPNによるケロバニーの信号は、上部と下部の峡谷(VUとNU)のセンサーから送信されます。 トブト、ポンプの下位レベルのセンサーがオフになると、ポンプPNが始動します。 VU上位レベルセンサーがリセットされると、PNポンプがオンになります。 上位センサーの運転中に発生する可能性のあるタンクのオーバーフローから回復するために、WAUの上位緊急レベルのセンサーが設置されています。 緊急レベルの高いWAUのセンサーがオンになってPNポンプがオンになるまで、約1時間かかります。 同時に、水位が下がるとすぐに、3分後に上部緊急レベルのセンサーが開きます。 (両方のポンプ場が同時にオンになっているときに累積容量を排出する1時間)、排水ポンプPNは再び上昇します。 つまり、システムは、設定された時間に従って、ロボットの上部緊急レベルセンサーからロボットに切り替わります。
ドライラン中のポンプ場の停止のために、ロボットがブロックされたときに、NAUのより低い緊急レベルのセンサーがNBのストレージユニットに設置されます。
機器の上部緊急VAUと緊急下部NAUのセンサーを送信すると、歪んだ音声信号が見られます。
フロートセンサーには、上段(VU)、下段(NU)、下段(NAU)のヤクセンサーを設置できます。
また、システムによって手動モードに移行されます。
提示されたシステムの制御方式と居間の給水は、産業用リレーと1時間のリレーに基づいて行うことができます。 zhitlovnyブース用の給水システムを備えたkeruvannyaの盾のふりかけ。 時計が1つのリレーから1時間に切り替えられた後、すべてのリレーの回路を「オーブン」会社の1つのプログラムされたリレーPR110から時計と産業用リレーに切り替えることが決定されました。
このようなアタッチメントを使用すると、ほとんどの場合、ポンプ装置やその他の技術的なアタッチメントを制御するためのリレーと電子ブロッキングの複合体全体がuvazにあります。 ここでは、2つの基本原則を最もよく示しています。 パイプライン(システム)のグリップの後ろにあるアキュムレータからの少量の水.
最初は、ポンプユニットは、そこから水が生きるために必要な容量に基づいて動作します。 タンクの真ん中、明らかに底部のロゼットのレベルの電気。 再通電するときは、上部電極のスイッチをオフにして、ランセットをオンにする必要があります。 底がむき出しの場合(不足がある場合)-ポンプがオンになります。 このような設計では、緊急の悪意を転送する必要があります。
オプションで、ポンプロボットのグリップをリレーに保存する必要があります。 Vonoは、公称圧力と過剰圧力の結果です。 つまり、リレーのグリップが大きくなるとポンプがオンになり、ポンプが変わるとオンになります。 自動化自体は、メインパイプラインとフェンスにインストールされます。 ロボットが上下の間に有能な設置としてここに横たわるのは理想的です。

同様の種類のスイッチングリレーは、promiseとbutsに使用できます。 最初の特徴的な大型ロボットストラム(最大16 A)の場合、追加の圧力計の結果から修正することができます。 このような付属品は非常に安価であり、正確に調整することが重要であり、優れた新興企業を通じて、より効率的にリソースを循環させることができます。 変更により、ポンプ制御装置を接点グループを介してトランスミッションに接続することにより、直接操作することが可能です。 これは、購入の単純さ、酸化の少ない裂け目、および未完成のぴったりとした口蓋裂のための新しいひねりを加えた再インストールの必要性です。

ポンプ場自体に追加の機器が必要になる場合があります。 viplivayを保存する3つの方法ですが、vidmoviの主な理由は、electromerezhyの大幅な低下、ロザリオnavantazhennyaの電気駆動装置への移動、またはロボットのラインのないユニットへの移動(「乾燥」)です。
Merezheviストリップは、接続された追加のリレーの背後で中和されるか、スタビライザーが跳ね上がります(schovitratnishe)。 usunennyaが、ストラムサーマルリレーブロックのviglyadіに給水するための自動機器をドライブに供給するため。 特定のドライブの公称ストラムに応じて、このようなモードの切り替えを有効にすることが重要です。 ポンプのドライランは、ブロッカーに信号を送るdzherelのレベルセンサーによって検出されます。

zahisnyhの付属品の組み合わせは、koristuvachまたはvirobnikによってピックアップおよび組み立てられます。
この目的のために、穴の真ん中にある穴はdzherelのようでした。 それは、水を邪魔するだけでなく、それがdilyantsiにある最先端の州の店であるかどうかにかかわらず、ブースにそれを届けることを可能にします。
daniymomentmaєmajesticvibirのsverdloviniの自動化。
追加の所持のためのスヴェルドロヴィーニ州
Sverdlovinaはそれ自体では水を与えません。
レポートを読む:
- 水があるグリビナは川の真ん中に大きく、200メートルに達することができます。
- 水は、強制ポンプ所持の追加の助けのためにのみ供給することができます。
- 現在、ポンプには2つのタイプがあります。
- dzherelaの純度を尊重することも良い考えです。
- 水とvikoristovyutフィルタリング所持の浄化のため。
ノート。 Vartovrahuvatiはsverdlovinіの近くにあり、追加の特別なセンサーがないか監視されています。 特別な別館の助けを借りて、建設の壁にvstanovlyuyutsyaの匂いを嗅ぎましょう。 スヴェルドロフスク地域の内側の地域から置くためのイクニーファスナーの方法。
ドリルについてはポンプを参照してください
補助ポンプの後ろの自動供給。
勝利は次のようになります。
- 補充しましょう。
- グリビニム。
- Vibratsіynim。
- Vidcentrovim。
ノート。 dzherela山とyogoobrudnenyaからの休耕地での成長と収集のそのような所有の必要性。
楽しいです。 砲兵の自動装備は長時間振動しなければなりません。 verdlovinisyagaє500m-codeとvikoristovuyutsyaの深さが産業用virobniztvaに勝ったことを拡大しました。したがって、dzherelの借方は高額の責任になります。
Yaktsepratsyuє:
- ポンプは固いときに振動します。
- Vimіryuєtsyaは年間1立方メートルの給水で勝ちました。
- ある種のvirobnikで遊ぶ準備ができたら、一定の時間、ポンプを上げて、労作を増やし、自分でdzherelyaから借方を取得することができます。 その過程で大幅な省エネが実現することで、ロボットは変化する可能性があります。
- 駆動モーター(vidcenters)の助けを借りてロボットに導かれるЄポンプと、ベアリングのラッピング(振動)に基づいて動作するєyti。
楽しいです。 ドリル穴の自動化は、ロボット工学の規則性の原則に基づいて除外された罪を犯しています。
- 通常の途切れのないロボットの場合は、必ず一生懸命働いてください。
- 勝利ではなく、1時間の些細な前進に奉仕するために勝利します。
- あなたが水をvikoristovuvatすることを計画したらすぐにtsіliyrіk、そしてもっと美しくyomu自体を通過させます。
- 夏季にのみ水が水で砕かれるとすぐに、ポンプを使用する方が美しくなります。ポンプを使用すると、圧力を下げることができますが、通常の給水には少しだけ使用できます。
- ヴァルトとは、 センターポンプ開発の端で、現在所有の選択について。
表面ポンプ
これらは表面ポンプです:
- このタイプの所有物は、土壌の表面にあります。
- dzherelaからの水の収集は、湿潤法によって行われます。
- だからこそ、そのようなポンプの努力は、スヴェルドロヴィンの偉大なグリビンで高いことを非難することです。
- 上部のポンプは、渦と中心に細分されます。
ノート。 川の真ん中からの水の供給の借方を増やすのを助けて、その日の給水の設置のための表面ポンプとvikoristovuyutのほとんど。 建設中 ボアポンプ.
- トップポンプ-大きなユニットを充填します。
- 臭いє自動、必要に応じてポンプをオンにしてオンにする必要があります。
- ポンプには、このタイプの1.5〜3気圧のマットレスがあります。
- ブースで州のtsilの世話をするのに十分でしょう:prannya、 ガス塔 2軒の家が薄すぎる。 そのようなポンプのお尻の写真に驚嘆してください。

ポンプの表面をきれいにし、音声で追加します。
推奨事項:
- そのような所持は、保護されていないviglyadから知ることはできません。
- 新規参入者の場合、原則として、それは誇りのある環境に移されます。
- ロボットの所持が敏感にならないように、それを隔離することが絶対に必要です。そうすれば、それは小さな子供たちに不快感を与える可能性があります。
- ヨーゴ接続用のObov'yazkovoは、電気配線を切断し、川の真ん中からパイプを運ぶために必要です。
幅木ポンプ
中央からも見ることができます。
Yaktsepratsyuє:
- そのような所持のロボットが成長します。
- カーテン式の振動ポンプにおいて、特殊な油圧室に配置されたピストンのロボットを介した給水時のロボット制御のプロセス。
- 1秒間に100回以上になる振動の特異周波数。
- このようなアタッチメントの場合、水の供給は大きなグリップの下で行われ、水は単に表面に吹き付けられます。
- VibratsіynіポンプとシステムのダウンタイムとZamiskyブースの給水のための指定。

ノート。 もちろん、そのような所有物の生産性が低いレベルにあることは明らかですが、それは工業生産の勝利を許しません。 さらに、ポンプのロボットの結果として受け入れられる変更は、適切に設計されており、迅速に改装されています。
最も人気のあるものは、ケーシングポンプの中央で使用されています。
- 匂いは正面から来ますが、dzherelaの真ん中から来ます。
- 説明書の取り付けについては、ポンプをdzherelの底から50〜100cmの深さまでポンプで汲み上げる罪を犯した人に注文します。
- 悪臭は低く聞こえるかもしれません。
ボーラーの中心から外れたポンプの再加工:
- このような所持品の設置は自分の手で行い、簡単に仕上げることができます。
- ポンプ自体は、連続運転の場合、最大25〜50ロケット(すべてがvirobnikおよびモデルから保存されます)のより大きな些細な用語を持っている可能性があります。
- ポンプロボットは、騒音や振動の影響を受けません。
- 悪臭は中東の壁を台無しにしません。
- このタイプのポンプ所有の生産性は、高いレベルに達すると同時に、工業生産に勝利するための硬度の活力に到達します。
- モーターが過熱した場合に冷却される特別なセンサーがあるため、ポンプは過熱しません。
- 過熱するとすぐに接続できなくなります。
- ポンプはコンパクトな円錐形で、ドリル穴に簡単にフィットします。
楽しいです。 vikoristovuyutの上部をポンピングするために同じポンプ。
- センタリングロボットのポンプの平均生産性は3.4-3.5m3 /年です。
楽しいです。 国の上部の地域が勝利する可能性がある場合は、一続きの岩の所有を利用するのが最善です。 まあ、それはそのようなランクのvikoristovuvatymetsyaではありません、yogoobov'yazkovoはvikoristannyaを分解します。 Tseを使用すると、故障を確実に所有できます。
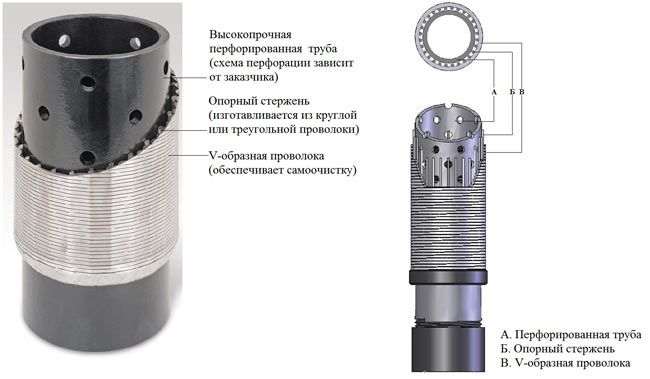
通常のロボットの場合、必要なのは頂点の特別な自動化だけでなく、フィルタリングのための所有物です。
デザインの特徴:
- 現時点では、フィルターは川の真ん中にあり、ポンプをオンにしたときに家などに水を供給するためにジェレルに浸透する力を与えないため、機械的なものにすることができます。
- また、中東の真ん中からの出口に立っているので、途中で1時間、ブースまで車で移動します。
楽しいです。 ドリル穴を爆破するとき、自走式ポンプは構造物の底に立っているため、しばしば悪質です。
- ポンプはポンプ自体に取り付けることもできます。 同時に、ポンプ設備の作業を開始する必要がありました。
- フィルターは水にさらに純粋で明るいものを追加します。
Schob oblastuvatは穴の上部にあり、自動システムと振動を彼女が所有しており、fahivtsの推奨事項を決定しています。 tsy stattiのビデオは、構造物にフィルターとポンプを取り付けるプロセスを示しています。
Pragnennyaは、母親のsvіyvlasniyzamіskiybudinokの偉大でガス処刑された大都市を、動物園で縁取られて解任しました。 Z tsimbazhannyampo'yazanezbіlshennyazrostannyabudivnistva Zamiskih Budinki素晴らしい場所の近くの村の近く。 雌犬のリュディンは文明の叫びのように聞こえた。 小さなアパートでゼロサムのように作られているエール・デヤキのスピーチは、zamyskyブースではアクセスできなくなります。 よく エンジニアリングヘムライン-すべての集落までではありません 一元化されたシステム..。 それでも欲しいので、蛇口をつければ、すぐに水が直りました!
自動給水-Zamyskブース近くの通常の給水問題を解決するための良い鍵。 Vlashtuvannyaとブース内の自動給水により、リトアニアでの水の供給が途切れることはありません。 冬時間、小ブース用。 ヴィコリストフチ 現代の技術、小さなアパートに提示されている手の助けを借りて、ザミスクの家を所有する可能性がありました。
ここは 原理図 Zamiskiyブースの自動給水。 表現の図では、ブースにドライブを供給するために勝利したdzherelの役割の井戸。 偉大な家のための幸福の幸福である、海に住む人々の数の減少は、かなり成長し、機嫌が悪い。 このようなタイプの場合、自動給水には穴を開ける必要があります。 SverdloviniのZastosuvannyaは、ブースへの水の供給の外側を確保することが保証されています。 Sverdlovinsの搾取に着手するBurinnya、oblastuvannyaは、特別なチームによって実行されます。特別なチームは、その場所でそれを見て、作業が完了していることを確認します。
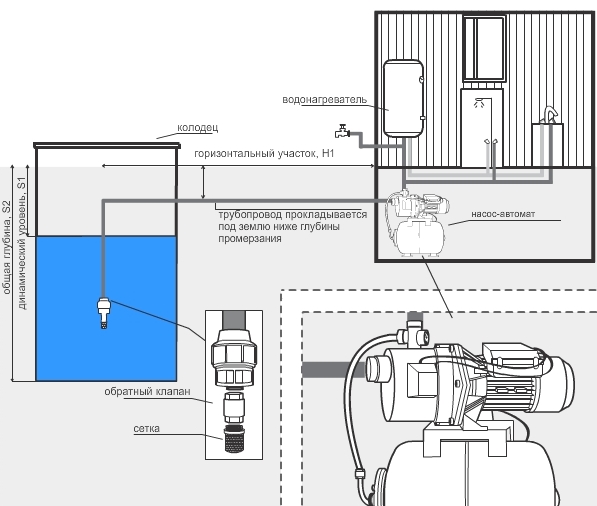
自動給水システムには、井戸やスヴェルドロヴィンに加えて、ブースを通るパイプライン、定期的に水を供給するポンプ、水を浄化してろ過するシステムが含まれています。 スキンスタンド個人用の水供給。 彼らは与えられた球体のロボットを見るかもしれないので、より頻繁に最新のfahivtsに目を向けます、そしてそれは開きます 努力の必要性ポンプ、ドリル穴の深さ、パイプラインの直径、供給方法、供給資格、最も美しいストレージの所有物として。 実際のところ、利用可能な水の数の運命の観点から、水の供給を中断することなくロボットの信頼性と信頼性が可能です。

そのような可能性はばかげていますが、すべてのオートマチックを個別に選択する必要があります。 ポンプが振動するときは、ベズポスレドニュのひずみを尊重する必要があり、生産性が向上します。 当然のことながら、命を救う水が大量にある場合、要求が厳しく、負担のかかるユニットです。 ポンプには、圧力と圧力降下の連続性を設定する自動ハイドロアキュムレータを装備することもできます。
クリム 冷水 ザミスキーブース必要なホットサプライ。 給湯器の助けを借りて手を伸ばす。 悪臭は電気ボイラーの役割でviconaniを起動することができます ガスボイラー..。 ここpalivі(電気またはガス)での原則的なvidmіnnіst。 与えられた特性vyplyayutとそれらの皮膚の欠点と圧倒的な加熱方法(ロボットの些細なこと、温度変化、鋼の供給など)からのVyhodyachy。
結果が出ました! 自動システム給水は、恒久的に信頼できる電力のために自給自足で構築されています。 一般的に、機械的に表示される機能の一部であるオプションの組み合わせを振動させる方が美しいです。


