システムの油圧特性
給水システムと熱供給є折りたたみ式油圧システム。レーン周辺のロボットが断続的な堆積に使用されます。 正しいケルバニヤと規制のためには、効率的な所持の水力特性の高潔さが必要です。 循環ポンプその空想。
システムの油圧モードは、ポンプと回路の油圧特性をオーバーランするポイントによって決定されます。
図1。 ポンプの水力特性と熱
図では。 1曲線1-ポンプ特性; 曲線2-熱融着の特性。 ポイントA-システムの油圧モードの開始である特性のオーバーリターン。 N-たとえば、それは閉鎖系の圧力に等しいポンプによって開発されます。 システム内のガラス質の水が供給されるように、V-体積ポンプの供給。
ポンプの水力特性は、圧力の停滞と呼ばれます。ポンプVの体積流量から、ポンプによってスローされるグリップΔpが低下する場合。ポンプの特性は、工場-virobniksによって決定されます。与えられたviprobvannyaのプロンプトが表示されます。
一定の周波数では、作動輪の作動輪の巻き付けには特性があります センターポンプ説明に近づけることができます
需要、W、公称モードでポンプを使用する方法、式から始めます
真ん中の名目レジームで  ..。 フラグメントは、原則として、二次法則に従って、熱フェンス内の圧力によって失われます。熱融合の特性は、二次放物線です。これは、次のように表すことができます。
..。 フラグメントは、原則として、二次法則に従って、熱フェンス内の圧力によって失われます。熱融合の特性は、二次放物線です。これは、次のように表すことができます。
(6.5)からわかるように、(6.5)から、幾何学的寸法、パイプラインの内面の絶対的な短さ、質量支持体の等量、および熱容量が、フォームに熱を蓄積することはありません。 フェンスの全範囲について、特性は1つのタイプのモードによって動機付けられる可能性があります。 硝子体水の特定のレジームに対する貴族の支持を確保し、硝子体の結果であるΔpの悪を落とす目的で。
多くの場合、駅には一度に複数のポンプがあります。 їkhnyospіlnoїロボティクスのモードの目的のために、全体的な特性を提供する必要があります。 ポンプのパラメータを合計する手順は、包含方法に従って保存されます。 ポンプが並行してオンになっている場合、全体的な特性は、それ自体が静かな圧力で硝子体(フィード)をさらに折りたたむことです。
小さい。 2.Pobudovaはポンプの特性を要約しました
a-並列包含、b-最後に包含
同じ特性を持つ可能性のあるポンプの並列スイッチングのグループの全体的な特性は、近似によって説明できます。

ポンプのスイッチを入れた後のPobudovaの要約された特性は、静かな硝子体自体で圧力を折りたたむことによって実行されます。
ポンプがオンになった後のグループの全体的な特性は、同じ特性を持つ可能性があり、ポンプの近似値によって記述されます。

並列に増加したポンプで供給を変更するステップは、フレーミングの特性の形で置くことです。 より平坦なビューは裾の特徴が少なく、ポンプのより効率的な並列接続です。 チムは裾のクールな特徴であり、最小の効果はさらに接続されています。
多数の平行流ポンプを備えたポンプユニットを設計する場合、同じ特性を持つすべてのポンプを振動させます。皮膚の供給には、同量の硝子水が必要です。 最後にスイッチを入れたときのポンプの供給も、メッシュの特性のタイプに応じて分類できます。 クーラーは裾の特徴であり、最後に電源を入れたときの方が効率的です。
閉鎖系の油圧モード
ポリアゴンを熱供給するための通常のロボットシステムの最も重要な心の1つは、グループ加熱ユニット(GTPまたはMTP)の前で熱を発生させることなく加入者ユニットに硝子体水を供給するのに十分な圧力を持っています。
加入者とネットの加入者でのネットの油圧モードの管理、およびバルクの入力ポイントでの圧力(圧力)と圧力の低下(圧力) ロボット。
サーマルヘッジのєスキーム、すべてのディリアンクのサポート、万力を与えるCHPのコレクターへの万力(圧力)、またはCHPのコレクターへの万力のドロップ(viz)を指定します。測定が簡単で、万力(たとえば)がポイントになります。 加入者のドライブのビトラジの形での自動調整器の加入者入力の明白さのために、ビトラティのオッズは、所与のレベルで追加の自動調整器に対して生成される。 一日の終わりに、加入者はサーマルブランクのすべての窓にあるローカット水の硝子体を知っていると同時に、ローカットのすべてのボックスにバイス(圧力)を握り、そして加入者紹介の視認性を高めるために、熱グラフと同時に表示されます。
GTPの日中、またはMTPには、住宅がない前に加入者に低品位水の硝子体の自動調整装置があり、熱の水力モードを開発するための主要な施設の1つがあります毛布。 プラント全体の更新には、サーマルフェンスのサポートの周囲、およびすべてのMTPと加入者の設置のサポートを知る必要があります。 加入者入力での自動調整器の持続時間中のサーマルフェンスの加入者からのrozrakhunkuvitratiドライブの方法を理解するのは簡単です。
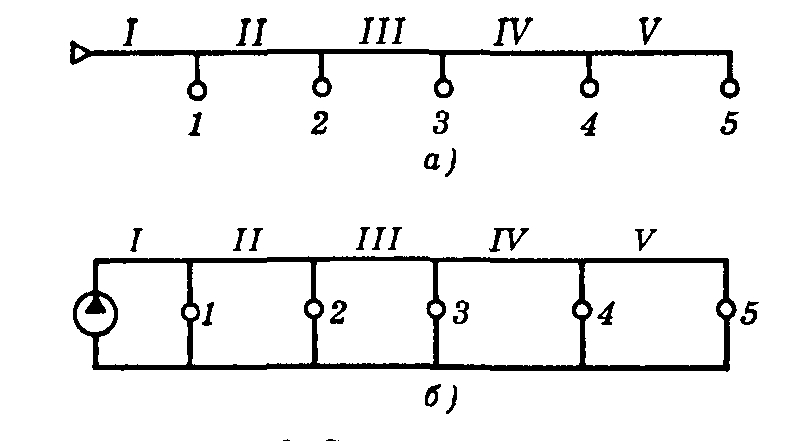
PHP。 3.熱融合のスキーム
a-1行の画像。 b-dvolіnіyne画像
本線はローマ数字で番号が付けられており、加入者と加入者はアラビア語で番号が付けられています。
裾のvodiのsumarnavitrataは、インデックスのない文字Vで意味があります。 加入者システムを介してVitratを駆動します-加入者の番号に等しい文字Vзインデックスを使用します。 たとえば、Vm-加入者システムmを介してVitratを駆動します。
Vidnosny vitrataは、サブスクライバーシステムtobtoを介してドライブします。 vіdnoshennyavitratiは、サブスクライバーシステムを介して、フレーミング内の合計vitratiリードに到達します。これは、インデックス付きのVを意味します。 たとえば、サブスクライバーのvidnosnaya vitrata 
Vitrataドライブサブスクライバー1はrivnyannyaから知ることができます
 .
.
Otzhe
加入者のインストール2を介してvitratを駆動することが知られており、そのためにrivnyannyaを開始するのが公正です。

サブスクライバーユニット3を介してドライブを知ることと似ています。
加入者がサーマルヘッジに供給されるとすぐに、vitratは任意の加入者のシステムを介して配信されます
この式では、ハリネズミをサポートする完全なビトラタドライブを見るかのように、サブスクライバーシステムを介してビトラタドライブを知ることができます。 З(6.20)viplivє、したがって、硝子体が加入者システムを介して駆動されるのは、ネットと加入者の設置のサポートを提供するためだけであり、すべてのガラス質の水をネットに配置するためではないことは明らかです。
作業をしている人にとっては、効果的な油圧モードを作成するために熱供給システムを設計および操作するのに1時間かかります。これにより、熱蛇口がロボットにとって安全になります。
希望に満ちたロボットの場合、敬意を払ってください。
1)加入者の前で必要な猛攻撃を確保する();
2)与えられたメインラインのvyklyuchennya沸騰熱;
3)ブースで焦げたviklyuchennyaスプレーシステム。これは、再起動時に誤った放送を意味します。
4)生存者のグリップを回して、パイプとオペレーションフィッティングを穴に向けることができるようにします。
Під 油圧モード時間内のフレーミングのさまざまなポイントでの悪徳(圧力)と熱の硝子体の間のリングの中央にある熱フレーミングスペース。
サーマルブランケットの油圧モードは、追加の励ましのために使用できます バイスグラフ(n'-アイソメグラフ)。
グラフは油圧パイプラインに使用されます。 Wienを使用すると、ロボットの油圧モードと通常モードのサーマルフェンスを直接操作できます。ロボットは、目覚めている間に亀裂の表面に注入され、サーマルフェンスの逆も同様です。 大きなグラフの場合、ポンプがない場合は、ネットまたはサブスクライバーシステムの任意のポイントで万力と明白な例を簡単に作成できます。 ポンプ場ロボットITPの油圧モードの自動調整のこのスキーム
クールレリーフで表面に溶接された熱融合の読みやすいp'-アイソメグラフ(図7.1)。 ゼロマークのある領域は、暖房設備をロゼットするためのマークに割り当てられます。 幹線道路のプロフィール 1 -2-3 -III n 'アイソメグラフが中断されている垂直領域からの読み取り。 ポイントで 2 メインラインへ 2 -私..。 主要高速道路に垂直なエリアに小さなプロファイルを表示する価格。 プロフィールの画像は 2 -私ある点の近くで反対の矢印に対して90°回転した断面グラフ上 2 主要高速道路のプロファイルの領域と要約します。 ポジションのグラフ上のローンのプロファイルの面積の合計については、ラインに表示されます 2 -。 同様に、プロファイルと視覚化があります 3 - .
ロボットは見ることができます 2パイプシステム熱供給、その原理図を図に示します。 7.1、 v..。 熱処理プラントからT高温水がその地点で熱供給に入る P1コレクターに新たな猛攻撃を加え、熱を供給します ![]() (これがヘムラインポンプのコブヘッドです(ポイント K); -熱処理プラントのハリネズミの水の圧力を排出します)。 したがって、ヘッジホッグポンプの設置の測地学的マークとして、ヘッジの穂軸を押して等尺性圧力に適合させ、コレクター内の過剰な圧力を熱供給にもたらします。 お湯メインラインで、贈り物のために 1-2-3-IIIギャラリーのそれ 2-Iі 3-II熱回収で筋肉系に到達します 私, II, III..。 メインラインでの猛攻撃に対して、贈り物として、そして猛攻撃のグラフの画像で P1-PIII,P2-PI,P3-PII..。 水は回転パイプラインによって冷却され、dzherela熱供給に送られます。 可逆熱パイプラインでの可逆グリップのグラフ OIII-O1, OII- O3、 OI-O1。
(これがヘムラインポンプのコブヘッドです(ポイント K); -熱処理プラントのハリネズミの水の圧力を排出します)。 したがって、ヘッジホッグポンプの設置の測地学的マークとして、ヘッジの穂軸を押して等尺性圧力に適合させ、コレクター内の過剰な圧力を熱供給にもたらします。 お湯メインラインで、贈り物のために 1-2-3-IIIギャラリーのそれ 2-Iі 3-II熱回収で筋肉系に到達します 私, II, III..。 メインラインでの猛攻撃に対して、贈り物として、そして猛攻撃のグラフの画像で P1-PIII,P2-PI,P3-PII..。 水は回転パイプラインによって冷却され、dzherela熱供給に送られます。 可逆熱パイプラインでの可逆グリップのグラフ OIII-O1, OII- O3、 OI-O1。
Riznitsaは供給ラインで活気があり、ネットの任意のポイントが呼び出されるのに精力的です 猛攻撃..。 つまり、どの地点でも供給とzorotnyパイプラインのようなものであり、同じ測地線マークがあります。たとえば、それが機能する場合、圧力を上げるには費用がかかります。
加入者は明らかにrivnの猛攻撃を持っています:;
![]() ;
; ![]() ..。 ドアへのリングコレクターdzherela熱供給のライザーポンプの前のリングラインの終わりの別の方向。 Otzhe、率直に言って
..。 ドアへのリングコレクターdzherela熱供給のライザーポンプの前のリングラインの終わりの別の方向。 Otzhe、率直に言って
たとえば、熱処理プラントのコレクターで
ブリッジポンプドライブのグリップを動かして、リンギングラインから出て、熱処理ユニットに導き、ウォーミングアップします。 ポンプは猛攻撃を拡大しています。
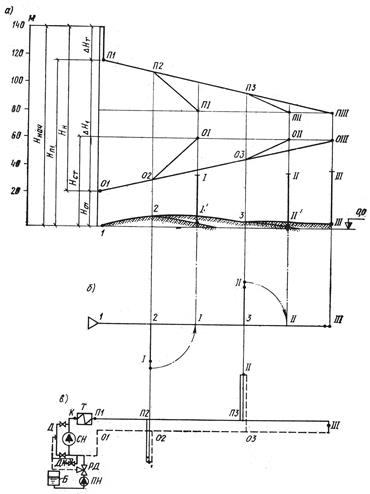
小さい。 7.1。 P'-アイソメグラフ (a)、単線パイプライン図 (b)二重管熱融合のそのスキーム (V)
私-III-サブスクライバー; 1, 2, 3 -大学; P-リニヤ、贈り物に。 プロ-リンギングライン; N- 押す; T-熱準備のインストール; СІ-剛毛ポンプ; RD-バイスレギュレーター; D-衝動を拾うポイント RD; MONDAYLOK--pidzhivluvalnyポンプ; B- pidzhivlyuvalnoy水タンク; DK-排水弁。
穂軸とパイプラインの端の圧力が等しく増加するラインとリンギングラインの圧力を下げます。 主流のために、贈り物のために、rivnの悪臭のために、そして ![]() .
.
流体力学的モードの説明は、ロボットとハリネズミポンプの1時間ごとにさらに進んでいます。 ポイントでのロータリーパイプラインのアゾメトリックラインの位置 О1ロボットの結果に適応する pidzhivluvalnyポンプPNі レギュレーターバイスRD..。 たとえば、次の場合にピボットポンプで開発できます。 流体力学的モードスロットルバルブ RDこのようなランクでは、インパルスを拾う時点で、ヘムラインポンプのバイパスラインからのバイスDが、ピボットポンプによって発生する可能性のある一般的な圧力に調整されます。
図では。 7.2は、ライフラインとバイパスラインのヘッドのグラフを示しています。 原理図 pidzhivlyuvalny別館。
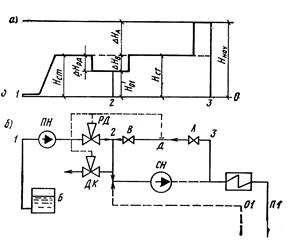
小さい。 7.2。 成長線での圧力のグラフ 1 -2 ローカットポンプのバイパスラインにあるもの 2 -3(a) pidzhivlyuvalny別館のスキーム (b):
N-p'єzometric圧力; -レギュレーターのスロットルボディの圧力を調整します RD吸引時のもの そしてそのB; SN、PN-ハリネズミとpidzhivluvalnyポンプ; PC- 排水弁; B--pivluval水タンク
ポンプの前で、供給電圧がゼロに等しくなるようにクリアされます。 ステムポンプ MONDAYLOK猛攻撃を展開します。 Tseiバイスはレギュレーターバイスの前にパイプラインになります RD。 dilyankaの格子への圧力を犠牲にして 1
-2
і 2
-3
他人を一目見ただけで不本意ながら。 熱流束のバイパスラインで、それはポイントに崩壊します 3
ポイントへ 2.
吸引する Aі もつヘムロックポンプで開発するためにずっと尋ねてください。 吸引のサイクルを閉じるステップは、そのようなランクで調整されます、吸引のそれ A猛攻撃と彼女の後の次の猛攻撃の助けを借りてBuv ![]() .
.
suvtsіを持っている もつ猛攻撃を取ります ,
それによって ![]() (ここ -
猛攻撃 RD)。レギュレーターバイスはその時点でバイスに取り付けられています D mіzh吸引 Aі 美術。適所に 2
猛攻撃があり、バルブに RD猛攻撃があります。
(ここ -
猛攻撃 RD)。レギュレーターバイスはその時点でバイスに取り付けられています D mіzh吸引 Aі 美術。適所に 2
猛攻撃があり、バルブに RD猛攻撃があります。
ヘッジからの熱の流れの増加に伴い、その時点で副 D修正が下がる、バルブ RD成長する、成長する、サーマルヘッジを成長させる、そして更新するためのグリップ。 速いターンで、その時点での副 Dそのバルブを修正する RD化粧。 バルブが閉じているとき RDたとえば、prodzhuvatime zrostatiのグリップは、温度が変化したときに水の量が増加した結果として、ロボットの排水バルブがオンになります。 PC、 schopіdtrimuパーマネントグリップ「自分自身へ」のポイント D、余分な水と排水を取り除きます。 したがって、流体力学的モードでのpidzhivlyuvalnypristrіyの実践。 ハリネズミのzupintsiがポンピングすると、生け垣内の熱の循環が増加し、システム全体の猛攻撃が最大になります。 バイスレギュレーター RD開いて、押しのけポンプ MONDAYLOKすべてのシステムで継続的な猛攻撃があります。
そのようなランクでは、別の特徴的な油圧モードで- 静的-システムと熱供給のすべてのポイントで、ポンプによって開発できる新しい供給がインストールされます。 ポイントで D流体力学と静的モードの両方で、一定の圧力があります。 そのような点はと呼ばれます 中性。
偉大なジドロを通して 静的グリップ、ドライブの停止で点滅、それ 高温フィードとロータリーパイプラインの両方で、グリップの許容範囲までのさまざまな重量の運転、スコット輸送。 Tsіvimogiは、静的および流体力学的モードでヤクのロゼットn'zometricラインの可能性に互換性を課します。
ただし、マイクロシステムの注入をネット内のバイスのレジームに切り替える場合、サーマルネットとマイクロシステムの油圧モードは自律的であるため、悪臭が独立したスキームになります。 そのような心の中で、レジームまで、フレーミングの悪徳はvimogiよりも低いように見えます。
ロボットサーマルヘッジとグラフのp'zometric圧力のグラフの場合、スケジュールの順序とグラフを表示する場合。
1.渦パイプラインでの等尺性の猛攻撃は、システムの静的レベルのせいです( Hビル)5以上 m(在庫)、ロータリーパイプラインのナクセバイス ナル目覚めの静的な悪徳よりも少なくなります Hビルブース内をドライブして、鳴っているp'єzometerの猛攻撃の高さに立ち、その上に真空(システムを空にする)があります。これは、システムへの悪質な打撃のようなものです。 umovaのグラフでは、timをキャッチしますが、zorotnyp'uzometerの線は5を通過できます。 m vishchebudіvlі:
N arr N zd + 5 m; N st N zd + 5 m.
2. zerotnoyメインラインのbe-yak_yポイントで、mabutyのn'zometricの長さは5以上です。 mすすり泣きは真空を構築せず、それを裾に変えました(5 m- ストック)。 グラフ上でtsyaumovaが向きを変えるので、n'zometricは、幻の本線の線であり、線の任意の点で5以上の有罪となる静的な猛攻撃の線です。 m rіvenearthіのためのvishche:
N obr N s + 5 m; N st N s + 5 m。
3.たとえば、ウェットサイドポンプ(たとえば、 エール)maєbuti5以上 m、水中へのポンプの流入とキャビテーションの流れを防ぐために:
エール 5 m。
4.焦げたシステムのドライブのグリップは、最大許容値に対して最小であり、焦げたアタッチメントを示すことができます(6 kgf / cm 2)。 心のグラフでは、チームは回転していますが、ハリネズミの静的レベルは無罪であるという渦のメインラインでのポゾメトリック猛攻撃の導入時に H add = 55 m(在庫切れ5 m):
N arr-N s 55 m; N st-N s 55 m.
5.エレベータに供給されるパイプラインでは、水の温度 , pidtrimuvatisのグリップは、熱の温度で沸騰する水のグリップ以上である可能性があります-予備から取ってください。 (静的レベルの場合、価格は必ずしも拘束力がありません):
H s=20 m私で H s=40 mで 。
tsya umovaのグラフでは、与えられたパイプラインの圧力線が有罪であるという時間がわかりましたが、 H sシステム内の過熱水の最も重要なポイントは焦げています(リビングルームの場合は地球と同じになり、工業用の場合はワークショップの過熱水のボトル):
НпідНs+ 5 m.
6.筋肉系の静的レベル(バケツの上部のレベル)は、システムの万力のせいではありません。 ティムはtsyaumovaのグラフに捕らえられています、まあ、まあ、非常にバラ色の芽はperevischuvati55の罪を犯していません m Rivni地球bіlyaіnhіhbudіwel。
7.システムのどのポイントの副官も、機器、詳細、および付属品の心から許容される最大値を変更することについて有罪ではありません。 最大の余分なグリップを取得するようにしてください R追加=16…22 kgf / cm 2..。 Tseは、パイプラインへの任意の時点でのp'zometricの猛攻撃であり、(地球の土地から)与えられますが、それ以下ではありません。 N追加- 5 m(在庫切れ5 m):
N pid-N z Nadd- 5 m.
8.たとえば、アラームの入力でどのように成長するか(パイプラインでのn'zometric圧力の差、パイプに供給されます)、ただし加入者のシステムの圧力を無駄にする方法:
N p = N pid-N arr N zd.
このようなランクでは、n'zometricグラフを使用すると、サーマルグリッドの有効な油圧モードを防ぎ、ポンプが使用できないことを確認できます。
食品を管理する
1.ロボットシステムと熱供給の信頼性のため、振動モードの主な設定を水熱フェンスの副に設定します。
2.ロボットとサーマルフェンスの同じ流体力学的モードと静的モードは何ですか? プライマーと静的位置の値を適用します。
3.p'zometricグラフを誘導するための方法論を提出します。
4.与えられ、zorotnіyである熱フレーミングのメインのラインバイスのポゾメトリックグラフ上の位置の値までvikladіtvimogi。
5. p'zometricグラフのさまざまな考え方に基づいて、供給ラインと熱供給のリンギングラインの許容最大および最小p'ozometric圧力に等しく適用されますか?
6.断面グラフの「中立」点とは何ですか。さらに、ボイラー室が規制されているCHPに何を追加しますか。
7.ファンシーポンプとピボットポンプの作業をどのように開始しますか?
Cons_7.doc
7.サーマルフェンスの油圧モード
7.1。 システムの油圧特性
システムの油圧モードは、ポイントオーバーフローによって開始されます 油圧特性ポンプと蛇口(div。図7.1)。 これがポンプの1つの特徴です。vitratiの正方形の比率で副をつかみます
 ..。 悪徳で焙煎するための式を持つ深紅色、私たちは知っています S.
..。 悪徳で焙煎するための式を持つ深紅色、私たちは知っています S. .
.
ヤクの底で圧力を下げましょう ![]() 、de
、de  ..。 温度の変化に伴い、熱伝達率は電力の変化に比例して変化します-
..。 温度の変化に伴い、熱伝達率は電力の変化に比例して変化します-  ..。 センターポンプの巻き付け頻度が変化すると、その特性が変化します(div。図7.2)。 Ob'amniy
..。 センターポンプの巻き付け頻度が変化すると、その特性が変化します(div。図7.2)。 Ob'amniy
 小さい。 7.2。 ポンプの周波数とラッピングの変更のためのシステムの油圧モード | ポンプ硝子体はとして使用されます ラッピングの頻度で
|
 ..。 生け垣を支えるとき
..。 生け垣を支えるとき  ポイントAで
ポイントAで ; ..。 周波数を変更する場合、ラッピングは
; ..。 周波数を変更する場合、ラッピングは  で V=0
で V=0  ポイントBのi
ポイントBのi  ;
;  .
.多くの場合、駅には一度にポンプがあります。 Їхnyaは、їх包含の方法で堆積されることのsumarny特性です(div。図7.3)。 ポンプが並行してオンになっている場合、連続的な猛攻撃の間に全体の特性が硝子体に適用されます(図7.3a)。 前回ポンプをオンにしたときの特徴は、硝子体自体が静かな状態で追加の圧力を供給することです(図7.3b)。
 |  |
図7.3。 Pobudovaはポンプの特性を要約しました
a)並列包含; b)最後に含まれる
図では。 7.3a AB-ポンプ1の特性 なので-ポンプ2の特徴 ..。 広告-Їх特性が要約されています。 皮膚の横座標が曲がっている 広告横座標曲線の道路合計 ABі なので, ad = ab ac..。 グルーピーのおおよそ mポンプの並列スイッチング  、de
、de  -ポンプのグループの猛攻撃。
-ポンプのグループの猛攻撃。  -ポンプのグループのUmovny内部opir;
-ポンプのグループのUmovny内部opir;  --Sumarnavitrata。
--Sumarnavitrata。
図では。 7.3b AB-ポンプ1の特性 CD-ポンプ2の特性 KL-ポンプ1と2の総合特性。同時に al = ab ac..。 グルーピーのおおよそ n前回ポンプをオンにしたとき  .
.
裾のop_rが最小であるほど、ポンプの並列接続が効率的になります。つまり、硝子体が大きくなります。 前回ポンプをオンにしたときは、ヘッジの測定値が多くなり、より効率的にオンになります。 図7.4は、ポンプの2つの同一の並列スイッチオンの特性をまとめたものです。
 小さい。 7.4。 ポンプを並行してオンにしたときのヘッジでのガラス質水の変化 | ヘムロックマビグリアドのヤクシュチョ特徴 わかった、その後、1つのポンプが稼働している場合、硝子体が供給されます  、そして1時間ロボット2つのポンプ-vitrata 、そして1時間ロボット2つのポンプ-vitrata  ..。 半球の特徴はどれくらい良いですか OL、その後、1時間のロボットのように、ビトラタは同じもので満たされるので、2つのポンプがあります。 ポンプを並行してオンにすると、同じポンプが振動し、スキンポンプのビトラが取られます。 ..。 半球の特徴はどれくらい良いですか OL、その後、1時間のロボットのように、ビトラタは同じもので満たされるので、2つのポンプがあります。 ポンプを並行してオンにすると、同じポンプが振動し、スキンポンプのビトラが取られます。 |
洗浄ポンプの数に供給される総硝子体に等しい。
ヘッジの要約された特性の値は、グラフおよび分析で表示できます。 すべてのフェンスのサポートの指定で、これらはルールです。
1.ヘッジの最後の要素セットでは、サポートが必要です- S S = S s 私 .
2.要素の並列接続により、供給の合計があります。
 .
.  .
.
 図7.5。 新しい大学の前を含む、ポンプを備えたシステムのポブドバ水力特性。 a-原理図; b-大学へのポンプの所与の特性2-2; c)並列ロボットポンプでのドライブとヘッドの硝子体の値 | 図のホバリング。 7.31つの大学でポンプを配布するときに公正なものの全体的な特性をどのように誘導するか。 ポンプの運転とシステムの高等教育機関での改造と並行して、総合的な特性を引き出すために、ポンプの特性を1つの郊外の大学に持ち込む必要があります(div。図。 7.5)。 ポンプを見る A底の水 Z救助者に来て P..。 フロントポンプ特性 A大学1-1から大学へのポンプを生産する2-2 B..。 誘導ポンプ特性  、tobto、pump Aたとえば、大学2–2では、大学1–1のポンプの吐出ヘッド(特性 、tobto、pump Aたとえば、大学2–2では、大学1–1のポンプの吐出ヘッド(特性  )マイナスネットの圧力を無駄にする Z..。 ポンプの特性を1つの大学にまとめると、並列に接続されているかのように保存されます。 )マイナスネットの圧力を無駄にする Z..。 ポンプの特性を1つの大学にまとめると、並列に接続されているかのように保存されます。 |
ヤクは図から見られます。 7.5v、1つのポンプロボット付き Bたとえば、大学の2〜2本の道路で
 とvitratavodi
とvitratavodi  ..。 ポンプ接続時 A大学での猛攻撃2-2成長まで
..。 ポンプ接続時 A大学での猛攻撃2-2成長まで  図7.6。 ロボットと平行して、ヘッドシステムへの2つのポンプІとІІ P |  ..。 ただし、フロントポンプフローなし Bへの変更 ..。 ただし、フロントポンプフローなし Bへの変更  ..。 図7.6は、ポンプIとIIの特性、їх全体の特性I II、および裾の特性を示しています。 P..。 1つのポンプで私は裾に取り組みます、ドアのP ..。 図7.6は、ポンプIとIIの特性、їх全体の特性I II、および裾の特性を示しています。 P..。 1つのポンプで私は裾に取り組みます、ドアのP  tavitrata-。 1つのポンプがロボットIIの場合、硝子体の圧力є tavitrata-。 1つのポンプがロボットIIの場合、硝子体の圧力є  і і  確かに。 1時間のロボットで、vitratrivniの猛攻撃 Hі V確かに。 確かに。 1時間のロボットで、vitratrivniの猛攻撃 Hі V確かに。 |
7.2。 超臨界システムの油圧モード
サーマルヘムの油圧設計の研究所の1つは、皮膚加入者からの、そして全体としての水のビトラチの指定です。 回路のレイアウト、配電業者と加入者の操作、CHPまたはボイラー室のコレクターへの圧力をリストします。 加入者の紹介に自動調整器をインストールするときは、加入者のビトラティを呼び出します。 一日の終わりに、加入者はフレーミングのすべての窓にビトラットを見ることができ、節点での猛攻撃(圧搾)を知ることができます。 Vitratiの自動調整装置の期間中は、事前に加入者に運転してください。
S I-5 = S私 S 1-5、de S 1-5-利用可能なすべてのサービスの加入者の総数1-5。
rivnyannyaから知られているインストール1を介してVitratをリードします  、 出演者
、 出演者
 .
.
サブスクライバーインストールの場合2  ..。 Riznytsya vitrat
..。 Riznytsya vitrat  私たちはrivnyannyaから知っています
私たちはrivnyannyaから知っています  、de
、de  ..。 Zvidsi
..。 Zvidsi
 .
.
インストール用3otrimaєmo
 ,
,
de  -サブスクライバー3から残りのサブスクライバー5への接続からのサーマルフレーミングのop_r。
-サブスクライバー3から残りのサブスクライバー5への接続からのサーマルフレーミングのop_r。  ,
,  -IIIメインの出入り口の反対側。
-IIIメインの出入り口の反対側。
デヤコのために m救助者 n vіdnіtvіtvіtratavodそして式のために見つけられる
 . (7.1)
. (7.1)
この式では、ヘッジとハリネズミのサポートに完全なビトラタがあるかのように、サブスクライバーのインストールを通じてドライブのビトラタを知ることができます。 З(7.1)viply:
1.おそらく、加入者ユニットを通る水の硝子体は、ネットと加入者ユニットのサポートから横になり、それがヴォディのビトラタの絶対値から横にならないようにします。
2.服用したらすぐに nサブスクライバー、インストールによるvitratドライブの配信 dі m、de d < mシステムのサポートからのみ敷設し、大学から修正します d裾の終わりまで、そして大学に裾のサポートを置くことはありません d.
ポンプ場が裾で作動するとすぐに、ポンプはネガティブオピルとして固定されます  、de
、de  -たとえば、ポンプ場の硝子体。 フォームのパターンのSumarnavitrata vodiは、式の開始
-たとえば、ポンプ場の硝子体。 フォームのパターンのSumarnavitrata vodiは、式の開始  、de N-火力発電所のコレクターへの猛攻撃、そして
、de N-火力発電所のコレクターへの猛攻撃、そして  -熱融合のSumarnyオピル。
-熱融合のSumarnyオピル。
説明の説明に変更がある限り、価格とヘッジの点線の点の間でroztasvannyhであるすべてのサブスクライバーの場合、水の硝子化と比例して変化します。 ネット全体では、1人未満の加入者で変更のステップ数に十分な時間があります。 裾の要素のサポートが変わると、硝子体が変わり、裾がヤクになります。したがって、すべての生存者にとって、それは規制のレベルに引き上げられる必要があります。 裾の調整はさまざまな比率で行われます。 明らかな規制の場合、vitratワームの兆候が現れます。 比例した規制で、硝子体のrіvenは成長します。
加入者Xは、サーマルヘッジが接続されるとすぐに接続します。 裾のVitratをリードして変更し、ステーションとサブスクライバーXの間の圧力を変更します。 トムグラフ圧力
 小さい。 7.8。 生存者の1人が接続されたときのヘッジの圧力の変化 | (図7.8の点線)次のステップの前。 ポイントXでの猛攻撃が減少するため、サブスクライバーXからネットのエンドポイントまでのネット内のビトラットが減少します。 ポイントXからビトラティの変更のステップのエンドポイントまでのすべての加入者は同じになります-比例規制。
de |
 ,
, -サブスクライバーXが接続された瞬間までのvitratiドライブ。
-サブスクライバーXが接続された瞬間までのvitratiドライブ。 vitratiウェイクのXステップが大きくなります。 最初の加入者は、ステーションの中央がなくても、ビトラティマイナスの最小ステップがあります-f = 1。 駅から世界の近くf > 成長する1。 駅の夜叉が現実に変わる
^
7.3。 油圧性能
油圧システムからタスクの健全性の理解まで、油圧モード。 自動化されていないシステムでは、ロボットの変更可能モードでの熱供給は、油圧効率の動きによって大幅に弱くなる可能性があります。
優れた油圧性能は、油圧性能の効率によって特徴付けられます
 ,
,
de  rozrakhunkovyとサブスクライバーインストールで最も強力なvitratiドライブはどうやら。 二次領域の近くで約1時間のロボットシステム
rozrakhunkovyとサブスクライバーインストールで最も強力なvitratiドライブはどうやら。 二次領域の近くで約1時間のロボットシステム
 ,
,
de  -ステーションでの直接圧力とサーマルフレーミング内の圧力は明らかです。
-ステーションでの直接圧力とサーマルフレーミング内の圧力は明らかです。  -たとえば、駅で、どのように始めるか。 このようなランクでは、サーマルフレーミングの圧力が低く、加入者入力の圧力が低いほど、加入者システムの水力性能が高くなります。
-たとえば、駅で、どのように始めるか。 このようなランクでは、サーマルフレーミングの圧力が低く、加入者入力の圧力が低いほど、加入者システムの水力性能が高くなります。
システムの油圧モードの安定性は、穂軸の調整だけでなく、 okremichグループサブスクライバー。 全体として、追加の蓄熱器の加入者の熱供給、および必要なゲートの熱フレーミングのクラッチを変更する可能性を変更することができます。 全体として、生け垣の1つまたはいくつかのポイントで、与えられた法則のグリップを少しずつ変えていくと、水が見えにくくなります。 このようなポイントはポイントと呼ばれます 規制された万力..。 ポイントのグリップが静的モードと動的モードで固定されている場合、そのようなポイントはニュートラルと呼ばれます。 ステーションのコレクター間のスイッチのZazvychayニュートラルポイント。
図では。 7.10、 a pidzhivlyuvalny別館のスキームが描かれています。 レギュレーターは中性点Oから制御されます。バルブ2と3の開放段階は、ダイヤフラムバルブによって設定されます。 システムの回転数が増えると、バルブのグリップが下がり、バルブ2のダイヤフラムアクチュエータが開き、ポンプによってバルブが増加します。 バルブ2が上昇し、グリップが大きくなると、タンクに入る途中でドレンバルブ3が開きます。
図では。 7.10、 b n '等角グラフシステムの表現。 ここ あいうえおі AKLD-主な熱フレーミングのp'zometricグラフ。 Aod-隔壁のp'zometricグラフ; 約-十字架の中立点。
^
7.4。 ヘッジを決定する
生け垣の総導電率
 ,
,
 .
.
例えのために
 ;
;
 .
.
ネッティングのサポートは、現在利用可能なサブスクライバーから実行されます。
^
7.5。 ポンピングとスロットルを使用したメッシュの油圧モード
pіdstations
ポンプ場(NP)は、ポンプ場に供給されるパイプラインと、それらの間の変圧器に設置できます。 生産ステーションの設備は、不親切な風景、長距離送電、改善の必要性に見られます。 スループット容量 magistralとін。 図では。 7.11休暇
このようなランクでは、サブスクライバーにvitratiを追加することができます。 ステーションのポンプ場はCHPのポンプユニットと並行して運転されているため、油圧サポートを改善するためにNPに含まれているポンプを提供する必要があります。
水の流れ、生け垣から来る方法。 その結果、含まれるNPの大学では、熱の性質が変化し、圧力が上昇します。 NPのポンプにより多くの圧力を与え、より多くの水を供給し、加入者ユニットなどでそれらに行きます ドライブが少ないネットの熱から来ます。
図7.13に、絞りスタンド付きのサーマルメッシュの図とアイソメグラフを示します。 地域の高さが大幅に低下した折り畳みプロファイル(40 mの尻)がある場合、休耕地スキームでは、新しい測地マークで加入者に通常の静水圧攻撃を設定する必要があります。 静的モードでは、上部ゾーンからの水の流れが記憶されます
 小さい。 7.13。 2つの静的ゾーンを持つ二重管熱融合のスキーム (a)そのїїп'єsometricグラフ( b)。 1-zorotnyシャッター; TPPで2ポンプ; 3-レギュレーターバイス「自分次第」; 4ユニットポンプ; 5-上部ゾーン成長のレギュレーター |  図7.14。 リングライン上のNPとn'zometricグラフを使用した二重管熱融合の図。 a-図式; b、c-自動および非自動入力を使用したP'zometricグラフ。 1-NPのzorotnyシャッター; 2-zorotn_yラインのzvorotnyボルト; 3-NP; CHPで4ポンプ |
pidzhivlyuvalnyポンプ4は、下部ゾーンからの水を使用します。 ダイナミックモードでは、1つのシャッターがアクティブになり、レギュレーター5はタスクのスロットルを開くために Hトップゾーンで。
図では。 7.14は、リングライン上のNPとの二重管熱融合の図を示しています。 NPは、KintsevdylyankasのグループIIの加入者の呼び出し線のグリップを下げます。 ポンプのスイッチを入れると、水はポイント5と6の間の戻りラインに沿ってゲート2を通ってポンプを除いて流れます。 ポンプをオンにすると、ポンプの圧力差に対して、圧力差に3ポイント5と6ポイントがあります。 シャッター2は、ドライブを通過してポイント5から6を通過するまで閉じます。含まれているNPのサブスクライバー入力でのビトラチレギュレーターの出現により、ビトラティックウォーターおよびサーマルフェンスの変更はありません。
加入者入力のvitratiのレギュレーターがオンになるとすぐに、その時間はNPVinikє規制に含まれます。 NPが変化している駅でroztashovaniをしている生存者の間で、そしてNPの生存者の間でVitratiドライブは成長します。 rosrahunksでは、ポンプはdeyakiy hydravlichnyopirのようにねじ込まれています。
長期的には、非ドミアの油圧制御への土壇場アプローチへの最終アプローチの方法を使用してください。 それは、NPを通る前部硝子体ドライブの前に設定され、視覚的に(負に)NPの油圧サポートの意味、および窓の端にある大脳半球と体の硝子体の要約された説明です。 消費のために、NPを通してvitrataを運転してください。
^
7.6。 Razrakhunokはリングサーマルフェンスの水の流れを上昇させました
素晴らしい場所の暖かさは、ほとんどの場合、最も多様なシステムによって表されます。 そのようなフェンスのRozrakhunokはKirkhhoffのrіvnyannyasのruntutsyaです。
原則として、フェンスは自動レギュレーター、指定されたサポートを備えたレールの端にある水の指定された硝子体、および加入者の水の硝子体のポールの位置を備えています。
フェンスが自動レギュレーターによって所有されていない場合は、システム全体のドライブの指定されたビトラでのフィールドの開放と、与えられた圧力の後の円の円の引き出しのドライブの増加サークルへのドライブの供給の大学。
リングレットとビトラチレギュレーターの流れを簡単に確認できます。 図では。 7.15に、シングルループサーマルヘッジの図を示します。 後の水-
硝子体は箱の後ろに置かれ、それは最初のカークホフの法則を満たします、例えば:
別のカークホフの法則については、等高線で副(圧力)の不一致を開始します
大学に入学した場合は積極的に、大学を卒業した場合は否定的に、大学の硝子体を尊重します。 流れへの圧力を犠牲にして、それは正の正の方向、および年の矢印の後の等高線の方向、および負の方向、および反対方向の方向です。
このvipadkuで  つまり、scho、abo、schoそれらの同じ、。 このタイプの落下を示すP'-アイソメトリックグラフ、図の読み取り値。 7.16点線。 正の流れでの大学3での猛攻撃(1年前の矢のために崩壊するため)、負の流れでの前年比の矢、tobtoに対する1時間前の大学全体での猛攻撃は少なくなりました-
つまり、scho、abo、schoそれらの同じ、。 このタイプの落下を示すP'-アイソメトリックグラフ、図の読み取り値。 7.16点線。 正の流れでの大学3での猛攻撃(1年前の矢のために崩壊するため)、負の流れでの前年比の矢、tobtoに対する1時間前の大学全体での猛攻撃は少なくなりました-  ..。 来て
..。 来て  戸惑い、ポジティブフローの金額を減らす必要があります
戸惑い、ポジティブフローの金額を減らす必要があります  (炎症を起こしたビトラタ)、そして負の汗に、値自体が減少します。
(炎症を起こしたビトラタ)、そして負の汗に、値自体が減少します。
rivnyannyam(7.5)のUv'azuvalnaya vitrataviznachaya。
Zvidsy、不幸なメンバー、復讐のように  、otrimaєmo
、otrimaєmo
 , (7.7)
, (7.7)
de。  待って、兆候はそれです
待って、兆候はそれです  zbigayutsya。 知っている、小さな箱のビトラティを明確にするために、そしてそれまで、ドックは必要な精度で到達されません。
zbigayutsya。 知っている、小さな箱のビトラティを明確にするために、そしてそれまで、ドックは必要な精度で到達されません。
TSは熱源として存続しているため、メインラインには、水中および水路外の成長ポイント、つまり水上ポイントがあります。 これらのポイントの位置は、TPPのコレクターへの圧力であるTZのサポートに置くことです。 そのような柵の中のSumarnavitratavodiが与えられます。
図では。 7.17は、2つのステーションとして存在するTZの図とp'zometricグラフを示しています。 給水のポイントはそういう意味です。
 小さい。 7.17。 図式 (a)そのn'-アイソメグラフ (b) 2パイプTZ、2つのステーションからの生活方法。 点線-ビトラチの正面成長の場合; 簡潔な行-oblikuuv'azuvalnoyvitratiを送信します | ハリネズミのdilyankasに水の硝子体を持ったZadayutsyaは、第1カークホフの法則に従っています。 駅からの許容可能なビトラ ^ Aポジティブですが、駅から もつ- ネガティブ。 水にポイントを与えるєポイント 前..。 ポジティブフローのトーディ、єまでのポイントでバイスにドロップ しかし、負の流れで |
第2カークホフの法則については、悪徳のドロップに矛盾があります
 ポイントで 前.
ポイントで 前. de  ..。 Uv'azuvalnaya vitrataビザは(7.7)から始まります。 ハリネズミのジレンクのバラ色のビトラチのさらなる解明。
..。 Uv'azuvalnaya vitrataビザは(7.7)から始まります。 ハリネズミのジレンクのバラ色のビトラチのさらなる解明。
メインのKiltsevaTSは、コレクターに同じ圧力をかけた2つのdzherelとして生きることができるTSと見なすことができます。 このようなフレーミングの図を図1に示します。 7.18。直接熱供給
 小さい。 7.18。 二重管円形ヘッジの図とn'zometricグラフ。 a-家宝スキーム; b-回路が点滅します。 v-p'zometricグラフ; S約= S P; S約<S P; | コレクターからのショット A、および反対の矢印-コレクターから もつ.  ta H= 0。 そのようなMCを開発する方法は、そのようなサミー、空想のためのヤク、2つのdzherel生活から生きる方法です。 与えられたラインと鳴っているラインのサポートが同じでない場合、それらの中の水のポイントの位置は柔軟になります。 すべてのvypadkamirozrakhunokショーでは、第1および第2キルヒホッフの法則に基づいています。 ポンプが本線の後ろに設置されている場合は、伝熱のすぐ隣にあるステーションの圧力を押してください。 水の斑点 ta H= 0。 そのようなMCを開発する方法は、そのようなサミー、空想のためのヤク、2つのdzherel生活から生きる方法です。 与えられたラインと鳴っているラインのサポートが同じでない場合、それらの中の水のポイントの位置は柔軟になります。 すべてのvypadkamirozrakhunokショーでは、第1および第2キルヒホッフの法則に基づいています。 ポンプが本線の後ろに設置されている場合は、伝熱のすぐ隣にあるステーションの圧力を押してください。 水の斑点 |
直線でzmischutsya全体でrazdilu。
^
7.7。 重要な熱供給システムの油圧モード
熱伝達システムの油圧モードの主な特徴は、硝子体の取水口が存在するため、水が供給ラインの下のボトムラインにあることです。 実際には、取水口に到達するためのコスト。 供給ラインのp'zometricグラフは、回転ラインからの取水があるときに永続的になります。そのため、供給ラインの硝子体は、加入者入力の硝子体の追加のレギュレーターに永続的に使用されます。 取水量の増加に伴い、渦線で硝子体が変化し、渦線のネソメトリックグラフはより平坦になります。 供給ラインの健全なラインの取水量の場合、健全なラインの硝子体はゼロであり、健全なラインの等角グラフは水平になります。 同じ直径、直線と渦線で、グラフの取水口で、直線と渦線の圧力は対称です。 硝子体の主給水ユニットでの取水期間中、水は V o-直接パイプラインとリングパイプラインで。 取水口の場合は、硝子体の直線からの上昇があり、水は渦線の近くに運ばれ、道路の硝子体は焦げます、そして供給のラインでは、焦げたものへの硝子体の合計がありますとお湯の供給。 同時に、燃焼と硝子体のシステムの方向性が減少します
 図7.19。 オープンシステムのP'zometricグラフ |
ドライブ V oより少ないrorakhunkovy。 ゾロトノイラインから水分を摂取すると、酒皶の灼熱システムに送られます。 供給ライン、灼熱の無謀なラインのシステムのグリップと一緒に保管されているグリップをつかみます。
本館グループの建物の期間中
SHPでの取水口の存在について
(7.9)のディリモ(7.10)。 大幅
 ;
;  ;
;  ;
;  .
.
あなたが知ることができるZrivnyannya(7.11)  .
.
1.灼熱の滴のシステムを通して硝子体を供給するラインから給湯への水を取り除くとき。 zorotnoyラインから選ぶとき-成長。 で  = 0.4 vitrataは、灼熱の道路のシステムを通り抜けてrorachuncateします。
= 0.4 vitrataは、灼熱の道路のシステムを通り抜けてrorachuncateします。
2.灼熱のシステムを通してvitratiのステップを駆動します-
システムのオペレーティングシステムよりも大きいシステムを介してvitratiのステップを駆動します。 システムからのすべての水と灼熱が給湯の取水に行く場合、給湯での取水量の改善をもたらすことができる。 硝子体が多い場合、リングパイプ内の流れはゼロになります。
図6.22。 zorotnoyパイプラインのガラス質での燃焼システムでのガラス質水のステップの注入
で  s(7.11)私たちが知っている
s(7.11)私たちが知っている  、 出演者
、 出演者
 (7.12)
(7.12)
(7.11)から(7.12)を代入すると、  .
.
 .
.
で  主給水用の水は、リンギングラインからシステムを通って流れ始めています。 システム全体を握ると、灼熱が落ち、給湯設備の設置価値が大きいと、特大のバイスは0になります。結局、灼熱のシステムに水が入らないようになります。しかし、水はそのリンギングラインの供給ラインから温水供給に来ます。 Tseはシステムのクリティカルモードであり、f = 0です。 Z(7.11)
主給水用の水は、リンギングラインからシステムを通って流れ始めています。 システム全体を握ると、灼熱が落ち、給湯設備の設置価値が大きいと、特大のバイスは0になります。結局、灼熱のシステムに水が入らないようになります。しかし、水はそのリンギングラインの供給ラインから温水供給に来ます。 Tseはシステムのクリティカルモードであり、f = 0です。 Z(7.11)  ..。 記号「-」は、反対側の変化の鳴る線のルーチにまっすぐであることを意味します。 私たちはあなたが知っていることを知っています
..。 記号「-」は、反対側の変化の鳴る線のルーチにまっすぐであることを意味します。 私たちはあなたが知っていることを知っています
 .
.
Umovyvirivnyuvannyaレジーム-  ..。 pidtrimkaの場合 V oロザリオのレベルでは、駅でヘムロックポンプの小さな猛攻撃を伴うドクニンジンのpratsyuvati。
..。 pidtrimkaの場合 V oロザリオのレベルでは、駅でヘムロックポンプの小さな猛攻撃を伴うドクニンジンのpratsyuvati。
水熱メッシュの場合、次の油圧モードを使用できます。
rosrahunkovy-派手な水のroserahunkovyvitratsの後ろ;
越冬-高温の水の最大摂取量で、リターンパイプからの給水。
過渡的-より高温の最大取水量で、パイプラインからの給水が供給されます。
lіtnіy-非燃焼期間での最大navantazhennі温水供給で;
静的-サーマルフレーミングでの熱循環の持続時間。
緊急。
水熱フレーミングスライド用の新しい鋼管の内面の同等の短さは受け入れます k e = 0.0005 m;
オパール期間と非オパール期間には、水熱フェンスの水力モード(n'zometricグラフ)を使用する必要があります。
p''zometricグラフが許可されます:パイプラインには大きな圧力があり、それがリンギングに影響を与えます。また、たとえば、サーマルフレーミングの任意のポイントでパイプラインから抜け出す方法もあります。 雑多なrelfuのurahuvannyaから、roztashovuvannyの圧力と生存者を引き付ける回路の振動の高さ; 自動調整器、エレベータノズル、熱回収システム用のスロットルアタッチメントを追加します。 中小規模のポンプを追加します。
P'zometricグラフは、メインおよび四半期ごとのサーマルフェンスに使用されます。 主なサーマルフェンスには、次のスケールを採用できます。水平M 1:10000; 垂直M1:1000; 四半期ごとのサーマルヘムの場合:M g 1:1000、M約1:500。
P'zometricグラフは、熱伝達システムの静的モードと動的モードに使用されます。 本線の座標の穂軸については、TECの位置を取ります。 受け入れられたスケールで、トラックのプロフィールと来た人の数があります(私は9つの表面について忘れます)。 縦軸(圧力軸)のゼロマークは、暖房本管の下部のマーク、またはヘムラインポンプのマークと呼んでください。 静圧の線があり、その大きさはシステムと熱回収のために5メートル未満であり、5メートル以上です。 熱水を使用する熱供給システムの静圧は、100°Cの凍結水の温度の原因となります。
熱回収システムの最大使用圧力の値を設定する必要があります。鋼製の加熱アタッチメントを備えた加熱システムの場合、およびエアヒーターの場合-80メートル。 チャバニーラジエーターで発射されるシステムの場合-60メートル。 独立回路の場合、表面熱交換器を取り付けます-100メートル。
次に、動的モードの圧力グラフを修正します。 縦座標の軸上で、ポンプブランドのプールにあるニップルポンプ(30〜35メートル)を濡らす前に、ノズルに必要な圧力をかけます。 低圧、吸引タイプ、低圧、低圧ポンプのウェットノズルのバイスと水の温度は、キャビテーションのバイスのせいではなく、責任もありません。
そして、水力開発の悪質な結果は、熱心な主流の猛攻撃に対抗する線になるでしょう。 バックボーンメインラインでのヘッドの価値は、静圧のラインが促されたときにヘッドが戻ったことを非難することです。 たとえば、水熱回路の回転パイプラインでの流体力学的レジームの場合、それらは、システムと5メートル以上の熱回収を探す特大(5メートル以上)の罪を犯します。顕微鏡の熱回収システムの最大作動バイスの値を10(またはそれ以上)同じにすることができます。 さらに、ラクンコビ地区への熱供給システムには圧力線があり、そのサイズは40〜50mと見なすことができます。
次に、供給されるパイプラインの圧力へのラインと、熱のコミューン(TEC)の圧力へのラインがあります。 賛辞の期間中、火力発電所のコミューンの圧力を取り除くことができます
25〜30 m。たとえば、機械的機能の排水口から供給されるパイプラインのすべてのポイントで、160mの最高温度を超えた罪はありません。
ピボットポンプの圧力を変更するときのp'zometricグラフは、上り坂または下り坂と平行に変位する可能性があります。その結果、筋肉の熱回収システムの枯渇または圧壊に対して安全ではありません。
同時に、ポンプの受け入れられたブランドの境界値を最小から最大(div。 「等角グラフ」を使用して、出口を備えた単線加熱回路図を直線化し、ラックの数と長さ、パイプラインの直径、熱伝達率を指定し、高ノードポイントを加圧します。 メインメインラインの断面グラフには、ロザリオvidgalushennyaのグラフが表示されます。
P''zometricグラフは、非paluvial期間のために促されるかもしれません。 超臨界システムでは、多くを費やす必要があります
zorotnyに供給されるパイプラインの圧力、
ネオの給湯での低品位水の最大ビトラティの開始
生理を見た。 非常に重要なシステムでは、フィード内の圧力
vitratirivnogoをスキップするとmagistraliが開始します  、vitratirіvnogoの通過を伴うzvorotn_yメインラインで10% (Div。また、pіdbіrヘムラインとpіdivluvalnyポンプ...)。 コミューンdzherelaの圧力を減らし、たとえば、数珠の四分の一の前で成長するために、オパールの期間と同様にうまくいきます。
、vitratirіvnogoの通過を伴うzvorotn_yメインラインで10% (Div。また、pіdbіrヘムラインとpіdivluvalnyポンプ...)。 コミューンdzherelaの圧力を減らし、たとえば、数珠の四分の一の前で成長するために、オパールの期間と同様にうまくいきます。
四半期ごとのn'zometricグラフの入力を求められたら
dєvrahovuvati、
エッジ、および四半期フェンスのp'-アイソメグラフの猛攻撃の線は、静的モードと動的モードの下で、メインサーマルエッジのp'-アイソメグラフの一般的な線の続きになります。
四半期ごとの空想の穂軸への猛攻撃。
与えられた高速道路とzorotny、四半期の圧力について
budink_vクォーターのセントラルヒーティングシステムの圧力を下げるため。 で
クォーターヘムツールのn'zometricグラフを動機付けます。
たとえば、ウェイクアップに導入された場合(高架接続システムを使用)、導入されたシステムとマイクロシステムで等しい圧力損失が発生します 1.5の係数で、15メートル以上ですが、エレベータシステムと閉鎖システムの境界がはっきりしているため、給湯は25メートルです。 加熱ポイントの自動レギュレーターの減衰には、余分なグリップをお勧めします。
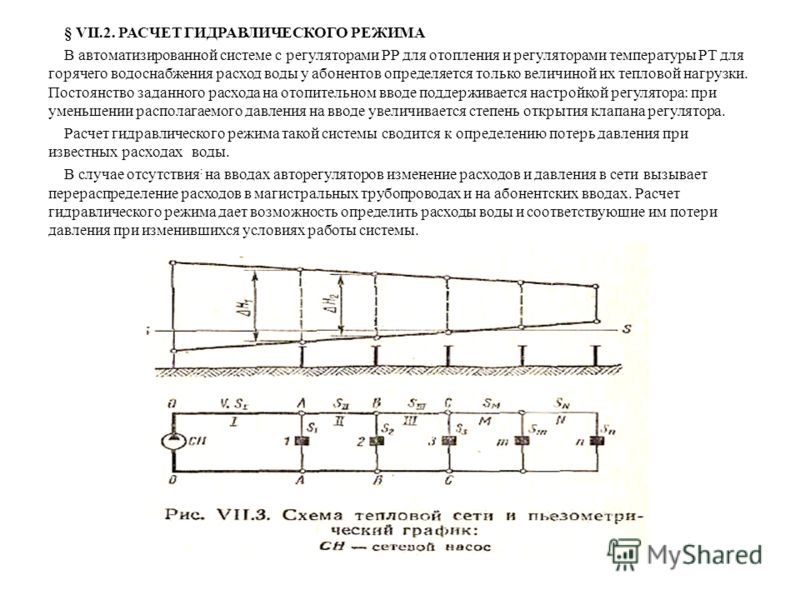
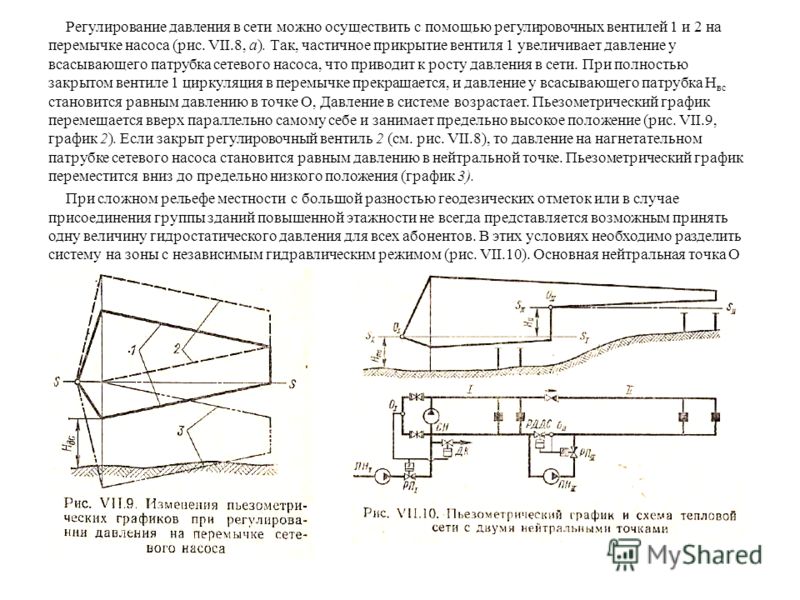
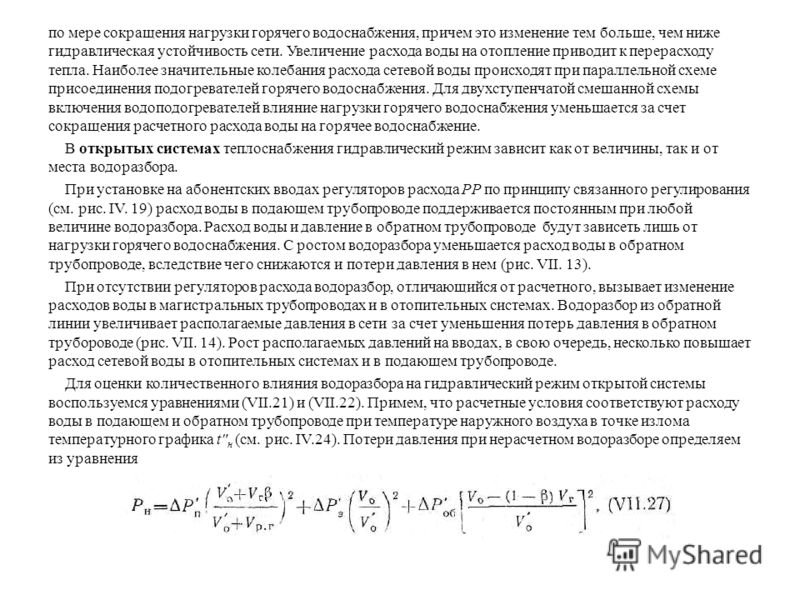
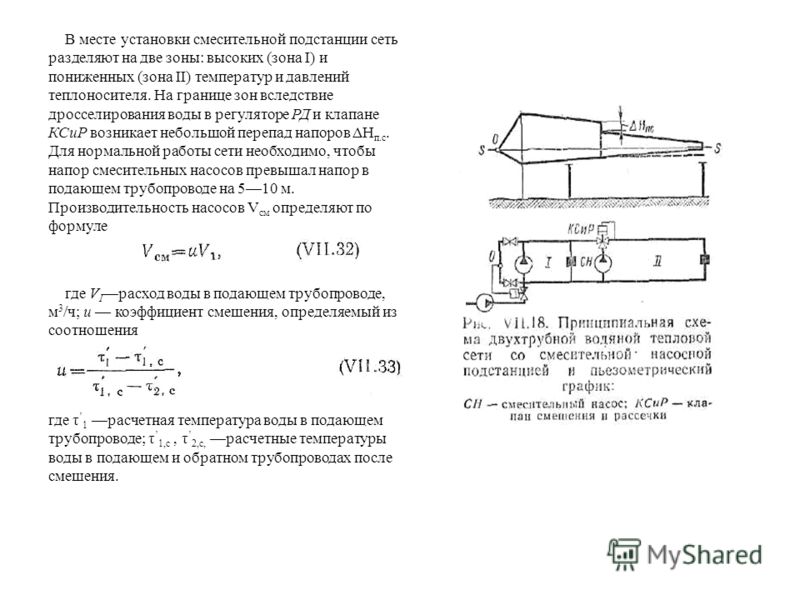
第7章熱間隔の水力学的モード§VII.1。 油圧モードの基礎油圧モードは、特定の時間の瞬間に、システムのさまざまなポイントで硝子体熱とバイスの間の相互接続を開始することです。 ラクンコビ油圧モードは、加入者のラクンコビ熱供給までの熱伝達の上昇を特徴としています。 加入者のヘッジの上位ノードポイントの副は、rozrakhunkov1に入力します。 実際、このプロセスは、油圧設計のデータに対するインセンティブであるn'zometricグラフによって明確に定義されています。 しかし、硝子体水を利用する過程で、システムが変化します。 硝子体の変化は、給湯での不均一な給水、可変供給の小規模な規制の現れを経験し、下部で変更可能な変化でナビゲートすることです。 ビトラティの変更は、加入者の水力条件と熱条件の両方を破壊する万力を生成するためにそれと結びついています。 油圧レジームの調整により、フレーミングで硝子体とクラッチが過剰に成長し、設置に許容される変更の制限が設定される可能性があり、システムが障害なく動作するようになります。 油圧モードそれらは乳白色の1時間の期間のために設計されています。 すべての重要なシステムで、熱供給が追加的に保証され、油圧モードは、供給されるロータリーとパイプラインからの最大取水量に維持されます。 油圧モードの設計は、主要な油圧パラメータに基づいています。 サーマルフェンスでは、原則として、万力のドロップの二次累積はほとんどありません。ΔP= SV(VII.1)de Sサポートの特性ですが、万力の場合は同じガラス質熱伝達、Pa /(m / 3年)2; V vitratiの熱量、m 3 /年。
サポートの特性の値は、ライン(VII.1)、(VI.2)、(VII.3)のスピル接続から得られます:AP ^ l(/ +; e)-= A(t + " 9)pro(VII。2)L、= 0.0894 ^、(VII.3)de z = 3600 s; 8滞在係数、パイプラインの短さからの敷設方法:敷設するサポートの特性。ポンプ:1 rosrakhunkov特性:加入者が接続されているときの回線の2つの特性。
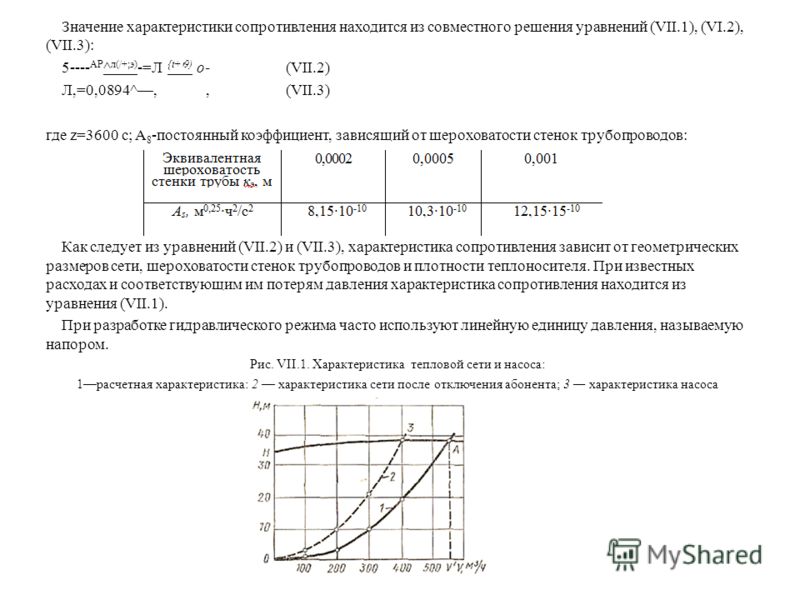
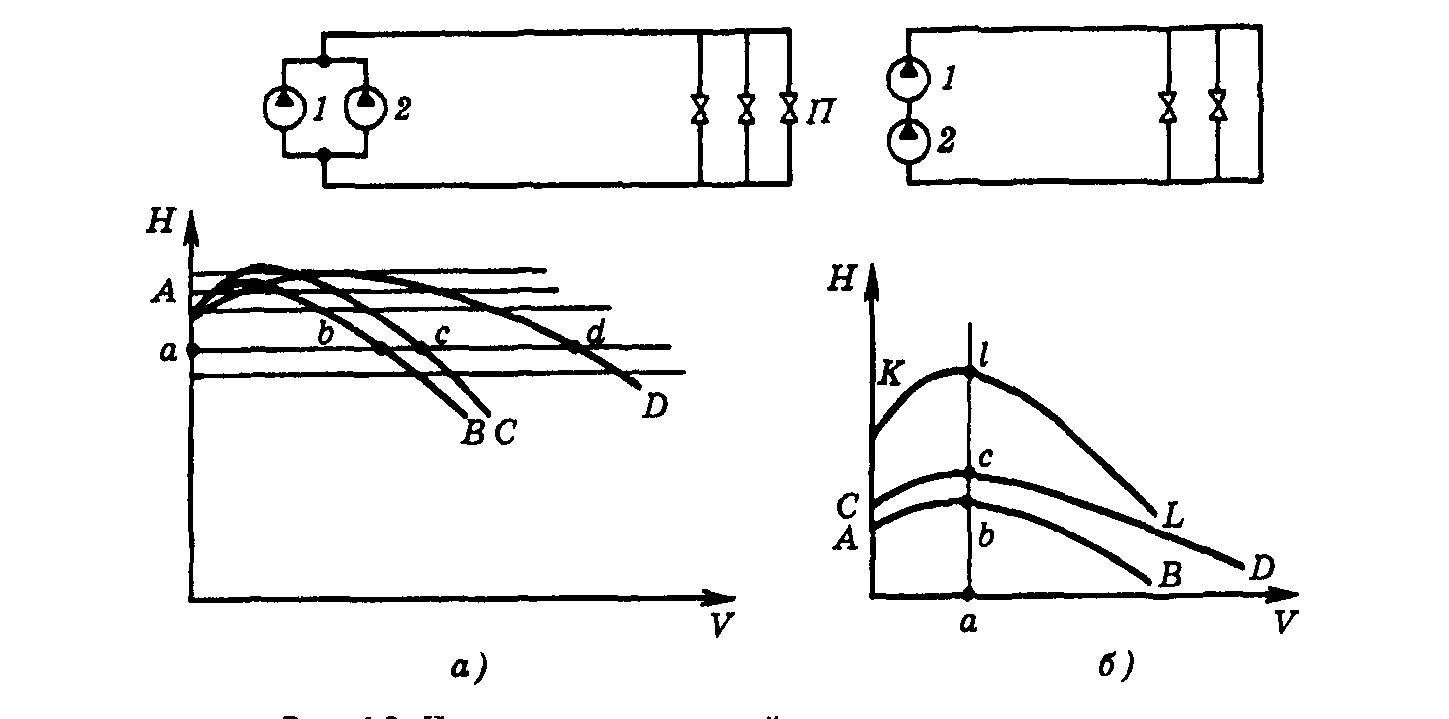
小さい。 VII.2。 後で(a)および(b)グラフィックの描画と並行して、グラフィック画像はハリネズミの特徴である硝子体の圧力に引き戻されます。 熱融合の特徴は、座標の穂軸を通過する2次放物線です(図VII.I)。 裾の特性をポンプの特性(ポイントA)でオーバーレッチングすることは、チェーン上のポンプのロボット操作の開始点です。 搾取の過程で、パイプラインの短さの変化に伴い、インストールの含まれる部分である新しい加入者の到着に関連して、ネットのサポートの特性が変化します。 視覚的に重要なのは、丸みを帯びたヘッジのサポートの特徴です。これは、同じdilyanokの後で、同じdilyanokと並行して積み重ねることができます。 ヘッジでΔPのバイスに向かい、目に見えない硝子体Vで最後の数個のダイに保管できるようにし(図VII.2、a)、レザーダイの2番目のバイスにΔP1、ΔP2 、ファゾムのダイの真ん中にあるΔP3。 ビトラタと式(VII。1)のサポートの特性を介してバイスをこすった後、フリンジのサポートの特性を取得できます。 倉庫dilyanokのサポートのS1、S 2、S3の特性。 Otzhe、前のdilyanoksからの最後の後にサポートの要約された特性は、dilyanoksのサポートの最も一般的な特性です。 平行z'єdnanni(図VII.2 b)を使用して、道路の半球でzagalnaya vitrate、vіdgaluzhennyasでsumy vitrate
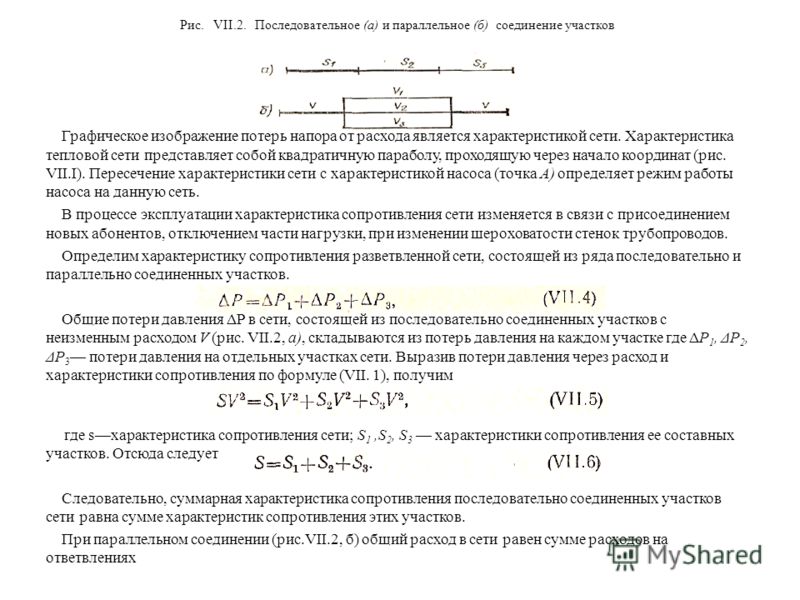
viraz(VII。1)を使用したVitrata vidnoは、viglyadで表すことができます。同じヘッジのディレンク(AP = AP 1 = AP 2 = AP 3)viraz(VII.7)viglyad: 1 / Sの値は、1 Paの水滴での州の同等の水の万力のランクの水力指標です。休閑の喪失(VI 1.10)により、次のことが認識できます。 a 1、a 2、a 3 okremikh dilyanokの容量、m 3 /年Pa0> 5。 このようなランクでは、同じdilyanokに平行する総供給量は、dilyanokの州の合計です。 対策(VII.6)と(VII.11)に基づいて、特定の州の丸みを帯びた生垣のサポートの特性とチェーンのエッジのサポートの特性が決定されます。 蓄積された堆積物の助けを借りて、油圧システム体制が開発されています。 5.このようなランクでは、同じdilyanokに平行する総供給量は、dilyanokの州の合計です。 対策(VII.6)と(VII.11)に基づいて、特定の州の丸みを帯びた生垣のサポートの特性とチェーンのエッジのサポートの特性が決定されます。 リマニー鉱床の追加の支援の背後で、油圧システム体制が開発されています。 "> 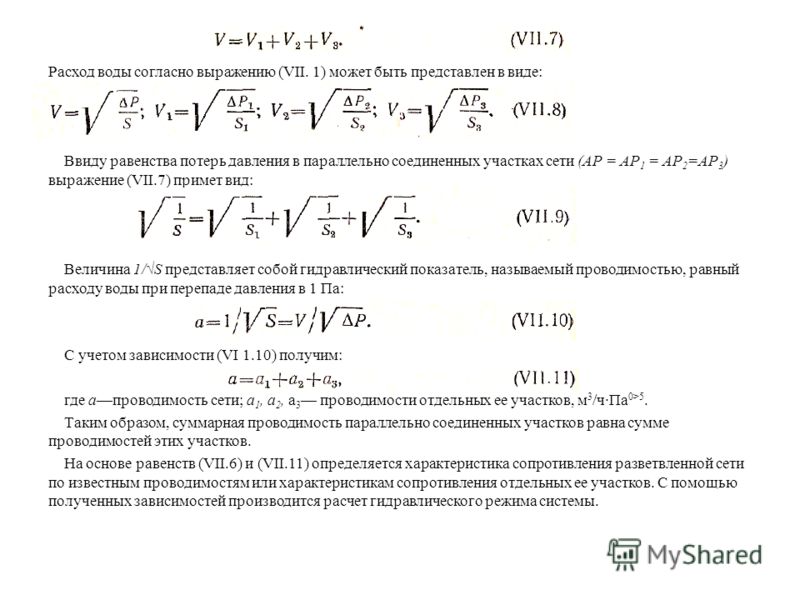
§VII.2。 油圧モードのROSAHUNOK 自動化システム温度調節器で燃焼するためのレギュレーターを使用する加入者の硝子体水の温水供給のためのРТは、熱供給の値によってのみ使用する必要があります。 口蓋入力での所与の牽引力の持続性は、レギュレーターの調整に適応します。入力の見かけのバイスが変更されると、レギュレーターのバルブのステップが変更されます。 そのようなシステムのRozrakhunokhіdravlіchnogoモードは、vyznachennyavznatnjavvratvіdomіvіdomivitratevodiに作成されます。 その日の時間:自動調整装置の入力で、枝編み細工品の硝子体と副の変化があり、硝子体はメインパイプラインと加入者の入力で大きくなりすぎました。 油圧レジームの機能は、変化したロボットシステムの心のためにドライバーと万力の万力を持つ可能性を与えます。
Vyhidnymiデータは、火力発電所のコレクターの裾、rakhunkovy n'zometricグラフ、およびバイスのスキームです。 サーマルフレーミングの図は理解できます。これは多くの加入者です(図VII.3)。 メインレールのサポートの特性は、Sに大きく関係しています。 I、S II、S III、...、S N、および加入者S1、S2、S3、...、Snのサポートによる加入者のサポートの特性。 出入り口VのSumarnavodi vitrata、加入者入力のvodi vitrata-V i(番号で示されるインデックス付き)。 最初の加入者から固定し、ヘッジAS 1AとASn Aの平行引き出しのグリップを書き留めて拭きます:de S1-n加入者1からn番目までのヘッジのサポートの特徴式(VII.6)および(VII.І)に基づく引き出しの使用。 Z rivnyannya(VII.12)は、加入者のIのビトラタに知られています。 加入者紹介2の場合、次のように書くことができます。deS 2-nは、加入者2からn番目までのサポートの特性の合計です。 エール、反対側では、道路のための大学Aでのグリップの低下:社会的解決のための3つ(VII。14)と(VII。I5)、私たちは別の加入者からの硝子体を知っています:
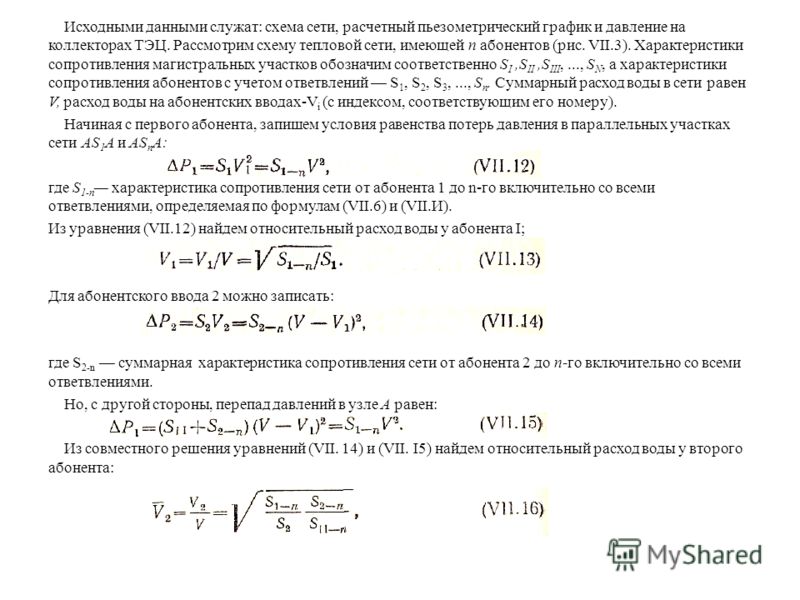
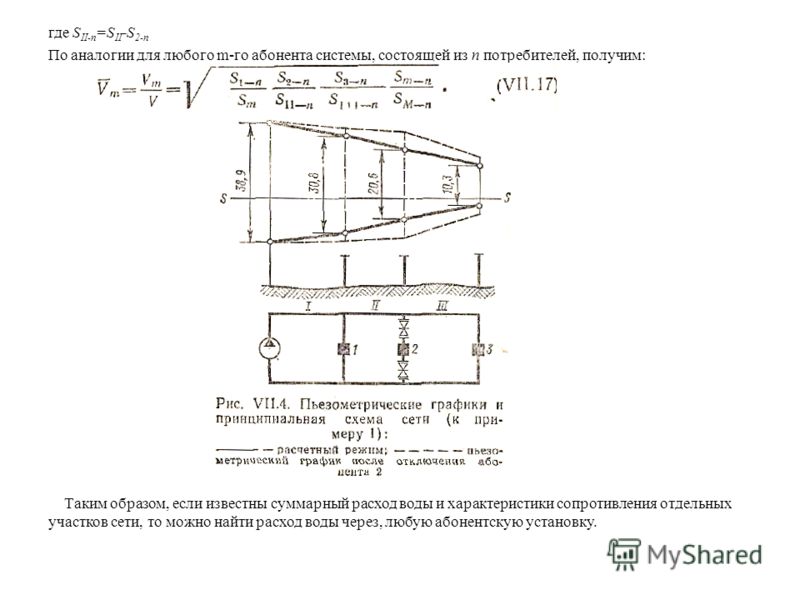
De S II-n = S II -S 2-nシステムのm番目のサブスクライバーの例えとして、サブスクライバーのインストールを通じてビトラタドライブを知ることが可能です。
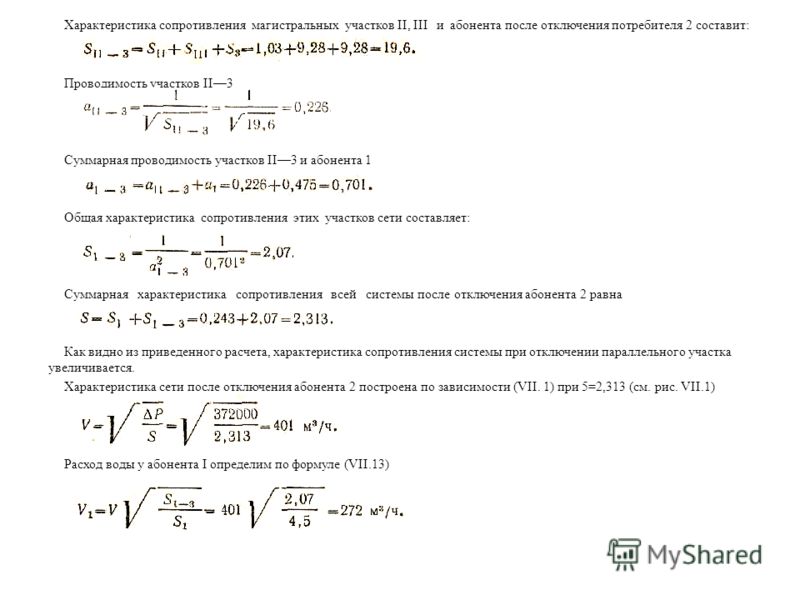
付録1.図に示すサーマルメッシュとrakhunkovyn'zometricグラフのスキーム。 VII.4。 Rozrakhunkovіvitratiは、表VII.1のガイダンスのグリップで先導しています。 視覚的には、加入者が接続されているときに、ビトラティによってフレーミングの圧力が失われます。2。ロザリオモードと非ロッキングモードのフェンシングの特性を示します。 ポンプを取り出すと、372・10 3Paの圧力でポンプのグリップが圧倒されます。 取水容量p = 975 kg / m3。 決断。 システムのサポートの特徴であるRozrakhunkovaは、データの式(VII.1)から取得します。 rorakhunkovoモード:生け垣の特性を硝子体で設定するように誘導するには、S = 1.16の圧力をかけます。 ポンプボアの特性を図1に示します。 VII.1。 視覚的には、式(VII.I.)に従って、ヘッジの主な分布と、ビトレートのタイプおよびrozrahunkovモードのバイスのサブスクライバーのサポートの特性。 結果を表に示します。 VII.1。 私たちは、システムのサポートと接続性、および加入者の接続の特性を知っています。
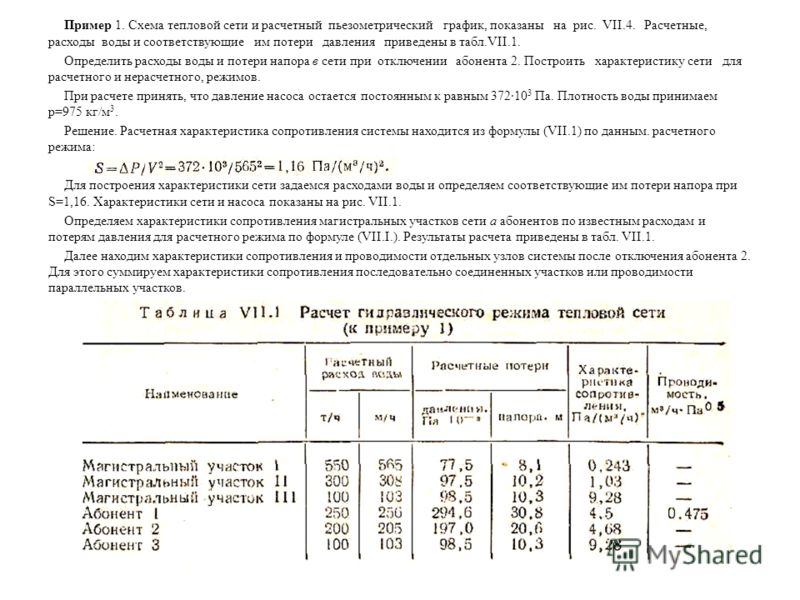
倉庫に接続されたときの幹線II、IIIおよび加入者のサポートの特徴: Zagalnyの特徴加入者に接続したときにシステム全体のサポートを確立する2。 サブスクライバー2が接続されている場合のブランクの特性は、5 = 2.313のバックログ(VII。1)で促されます(div。図VII.1)サブスクライバーIへのVitrataドライブは、式(VII.13)よりも大幅に遅れています。
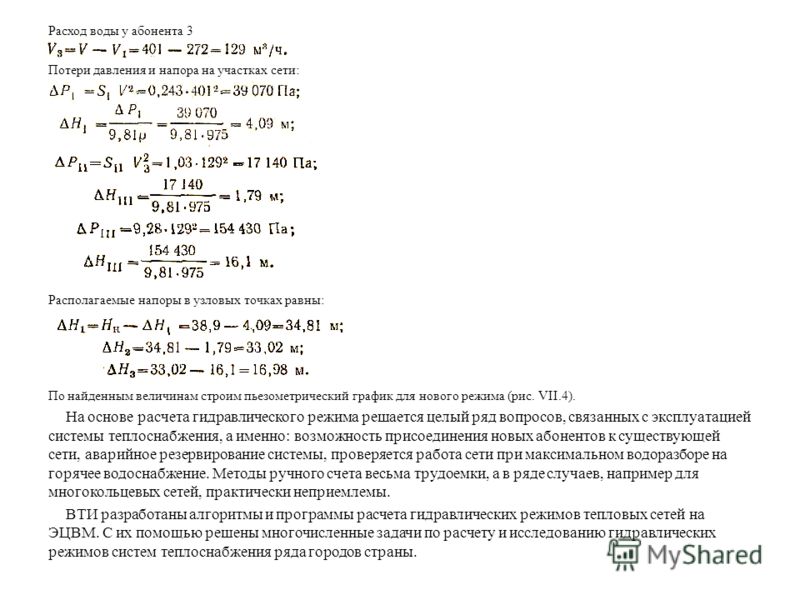
加入者でのVitratavodi 3フレーミングのdylyankasにグリップと圧力を保持します:rivnの高ノードポイントに配置されるように押します:既知の値については、新しいのn'-アイソメグラフがありますレジーム(図VII.4)。 油圧レジームに基づいて、システムの動作と熱供給に関連する低電力供給が保証され、最大の貯水量を回避するために、現在の対策に新しい加入者を追加する可能性が非常に高くなります 手作業によるラクンクの方法はさらに手間がかかり、例えば大規模なヘムステッチの場合など、多くの種類は実際には受け入れられません。 VTIは、ECOMのサーマルフェンスで油圧モードを作成するためのアルゴリズムとプログラムによって分類されます。 熱供給システムの水力レジームの開発と進歩に対する管理の数の追加の改訂の助けを借りて、国の国は低いです。
§VII.3。 熱供給システムの水力学的安定性生き残ったロボットの心の変化のために。 油圧効率は、V、Vmaxの効率によってのみ評価されます。 p align = "justify">油圧効率係数U = 1は、原則としてビトラティレギュレーターの入力に取り付けることができるため、加入者システムのビトラティ鋼は自動的に固定されます。 U1の悪用の本当の心の中で、自動化されていないシステムでは、それがヘッジと混ざっていても、加入者のドライブのビトラティを変更します。 したがって、たとえば、硝子体の一部が接続されると、熱フレーミング内の水が変化するため、入力のグリップが大きくなるまでフレーミング内のバイスが減少します。 圧倒され、成長している加入者にVitratを運転します。 加入者システムの油圧規制のウィキペディアのサイズの結果としての実際のvitratiのVidhilennya。 可能な限り、加入者システムの規制は間違った場所に分類されます。それを失うと、生存者の1人だけが失われます。 床が重要でない場合、フレーミングのグリップの落下は重要ではありませんが、ピボットによって導入された側溝ポンプのグリップで、グリップを落とすことができるため、グリップを取り外すことができます。 トーディは、同じように変更しました(VII。18)vіdnoshennyavіtvatvatvіt、otrimaєmodeΔRabvise、shoroztashovuyutsyaでのvitrateの使用は、vyrakhunkovіyvitratіの場合に導入されました。 ΔРЗrozrahunkovyモードのハリネズミのグリップを握ります。 R n = R ab + Rsグリッパーポンプ。
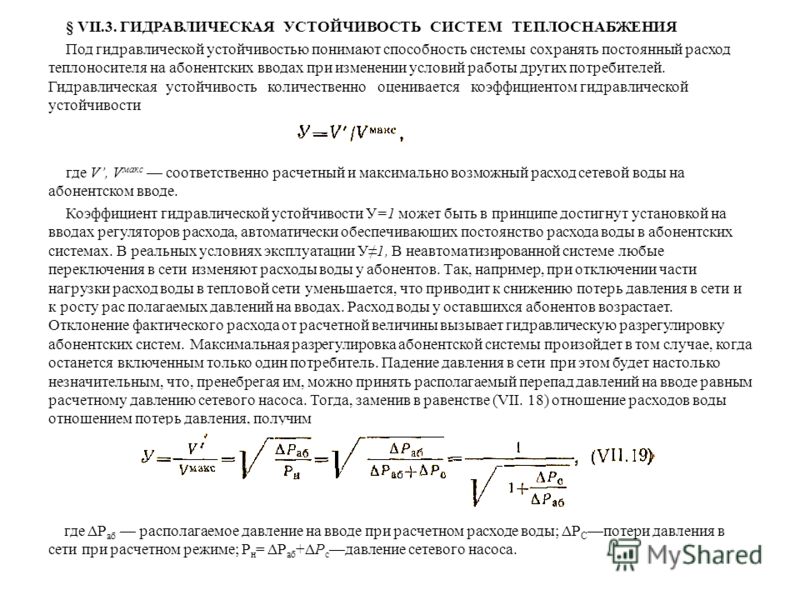
viraz(VII.19)から、システムの効率は、幹線のグリップの変更と加入者設備の油圧サポートの改善により変化します。 助教の助けを借りて、入口の直径を変更し、入口に絞りワッシャーを取り付けます。 メインパイプラインへのブローインが増加している可能性があります。 イチジク。 VII.5。 異常に接続された加入者の専用ロックインフィッティングをブースに導入することで、フェンスのサポートの特性が向上するため、システム内のドライブの外部ビトラを低下させることができます。 熱供給から接続された加入者へのボックスのグリップを握ると3変化し、その結果、入力のグリップが大きくなります(図VII、5、a)。 成長のすべての加入者にVitrataを持っていきます。 したがって、規制は、ヘビの兆候が同じのすべての加入者にとって重要である場合、
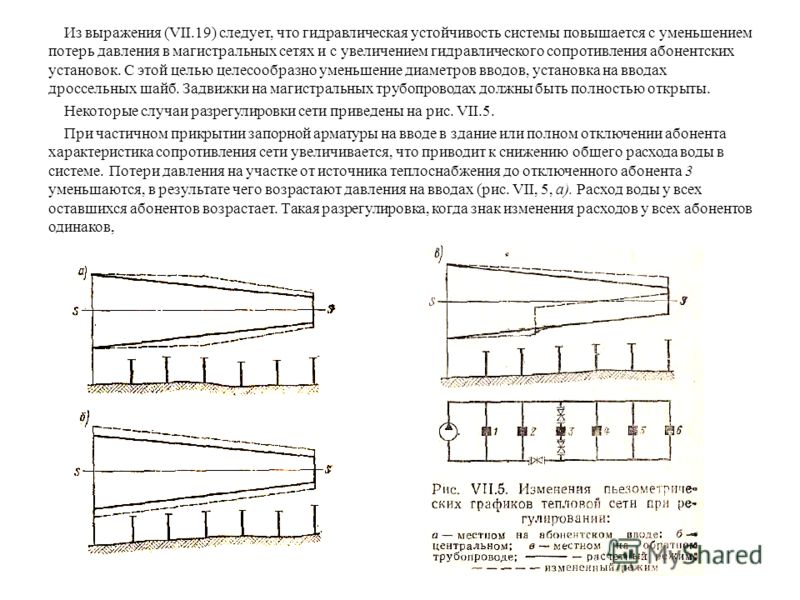
タイプと呼ばれること。 規制をより適切に評価するために、加入者からビトラティを削除することができます。 レベル(VII.17)からのサブスクライバー4および6の更新vitrateは次のようになります:Yak vyplya with viraza(VI 1.20)、サブスクライバーに使用され、サブスクライバー4から最後までのウィンドウでのネットのサポートの特性のみネットのポイント。 つまり、特性が変化した場合、サポートは、ヘッジの線と点線の中央に根ざしているすべての加入者のヘッジの品質に基づいており、ビトラの変化の線は同じです。 この規制は比例と呼ばれます。 加入者4、5、6の場合。dzherel間に再インストールされた加入者の場合、熱供給が変更され、サポートが変更されます。そのため、最も近い加入者が熱供給を変更するように再設定されました。 TEC加入者の近隣では、原則として、水力効率が高くなる可能性があります。 一定の特性でポンプのグリップを増やし(図VII。5)、フレーミングのサポートは、入力の明らかなグリップの比例した成長に合わせて行う必要があります。 システムには、異なる比例調整があります。 できるだけ早く、メインパイプラインの吸引を閉じてください。システム内の水のビトラタが通過します。 ただし、vitratの符号はサブスクライバーと同じではありません。 したがって、バックボーンのメインラインを吹く貞操(図VII.5 b)は、花綱の水の硝化を加速し、開窓の悪徳をつかみます。 dzherelと熱供給および吸引の間で登録されている加入者の入力のグリップが増加します。 そのvitratiドライブに加入者1と2が成長します。 吸い込む前にバックボーンメインラインのグリップを調整して、吸い込む前に加入者の明らかなグリップに変化をもたらします。 Vitratiは36の加入者システムでドライブします。 硝子体の変化の兆候が加入者と同じでない場合、システムはシステムを正しく調整できません。 お尻にホバーして、システムの操作の心の存在下で油圧レジームの可能な変更の大きな多様性を示します。
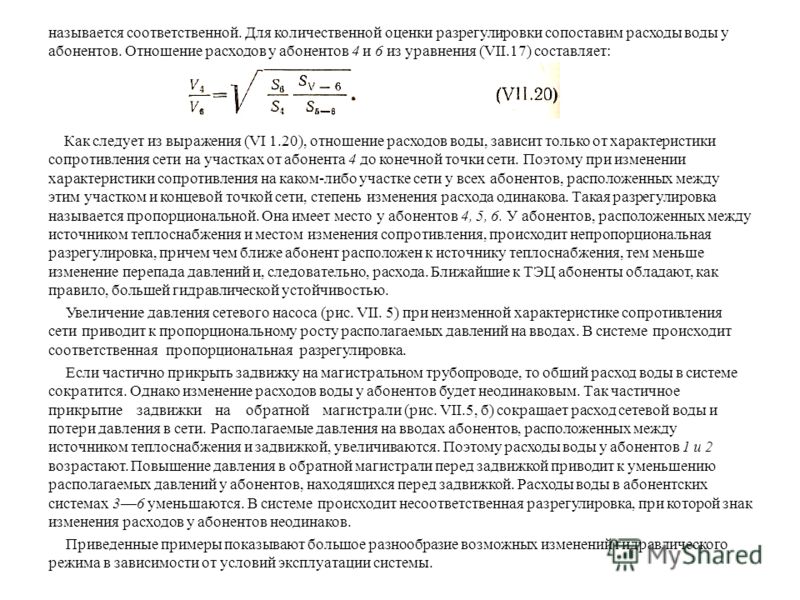
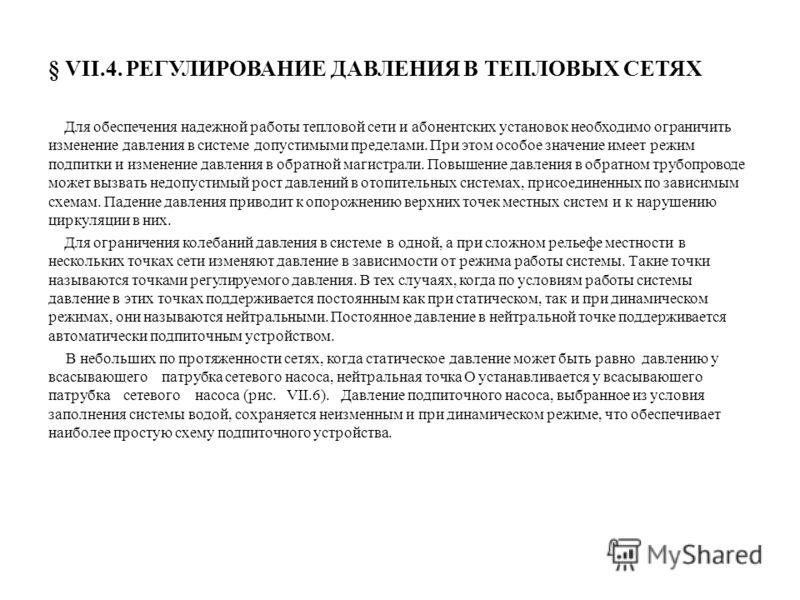
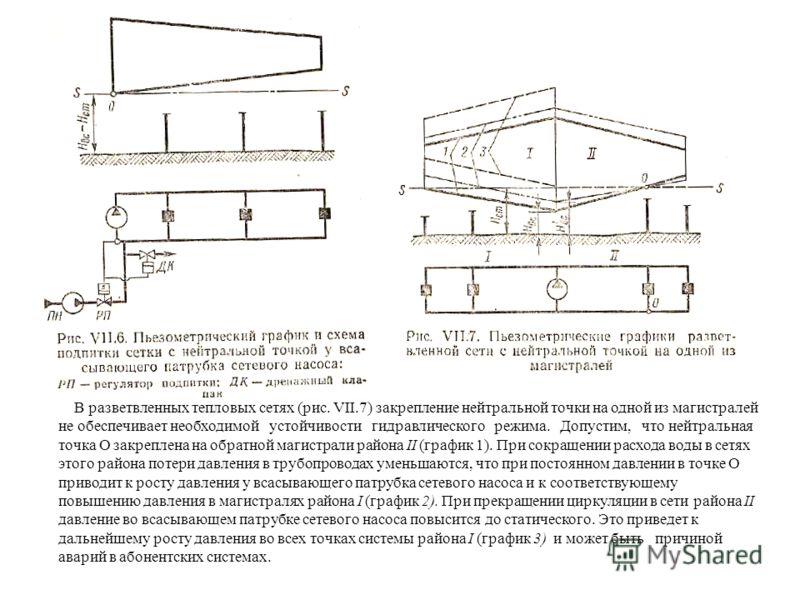
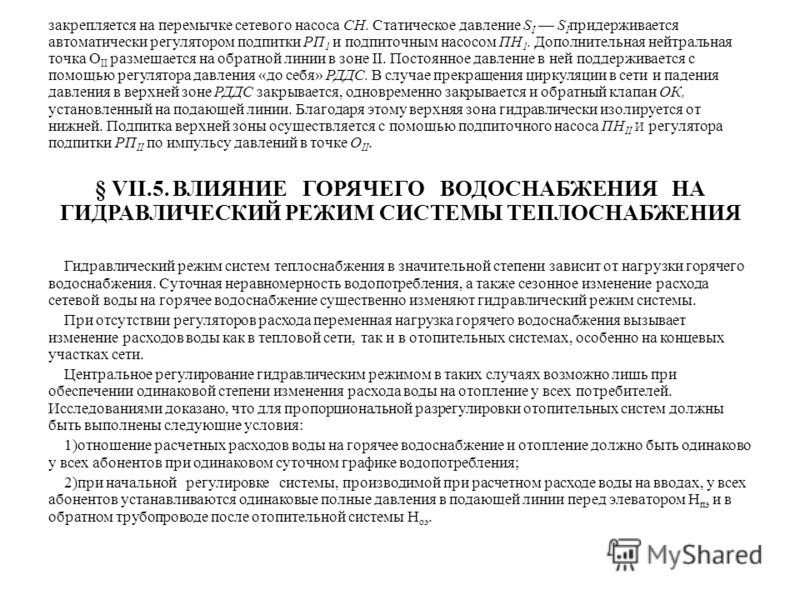
§VII.4。 熱間隔でバイスを調整する 同時に、成長と変化のモードがメインラインのグリップにあることは特に重要です。 ロータリーパイプラインで万力を動かす opaluvannyシステム、休耕計画に取り付けられて、筋肉系の上部の胞子とヤクの循環の崩壊に悪徳をもたらすために。 システム内のグリップを1つに囲み、ヘッジのデカールポイントでブリッジを折りたたむために、ロボットシステムモードでグリップを変更します。 このようなポイントは、調整された万力のポイントと呼ばれます。 静かな状況で、ロボットシステムの心の後ろにあり、静的なポイントでポイントをグリップしている場合、悪臭はニュートラルと呼ばれます。 ニュートラルポイントのパーマネントグリップは、アタッチメントに自動的に取り付けられます。 小さな柵では、静的グリップを使用してヘッジポンプのウェットパイプでグリップを引っ張ることができる場合、中立点はヘッジポンプのウェットパイプに設置されます(図VII.6)。 ポンプのグリップ、システムの排水口からの振動、および水は、動的モードで安全であるため、ピボットアタッチメントのスキームを簡単に保存します。
丸みを帯びたサーマルフェンス(図VII.7)では、メインラインの1つに中性点を固定しても、油圧モードに必要な剛性が得られません。 中立点Oは第2地区の幹線に固定されている可能性があります(グラフ1)。 エリア全体の亀裂内の水の流れが速いと、パイプラインのバイスが変化しますが、ポイントのバイスが一定の場合、分岐パイプのバイスに進みますが、ウェットのローカットポンプではそしてオープンエリア2まで、マグの圧力。 循環がヘッジホッグエリアIIに固定されると、ヘッジホッグポンプのvsoctuvalノズルの万力が静止ノズルに移動します。 目標は、リージョンI(グラフ3)のすべてのポイントでシステムを把握することであり、加入者システムで事故を引き起こす可能性があります。
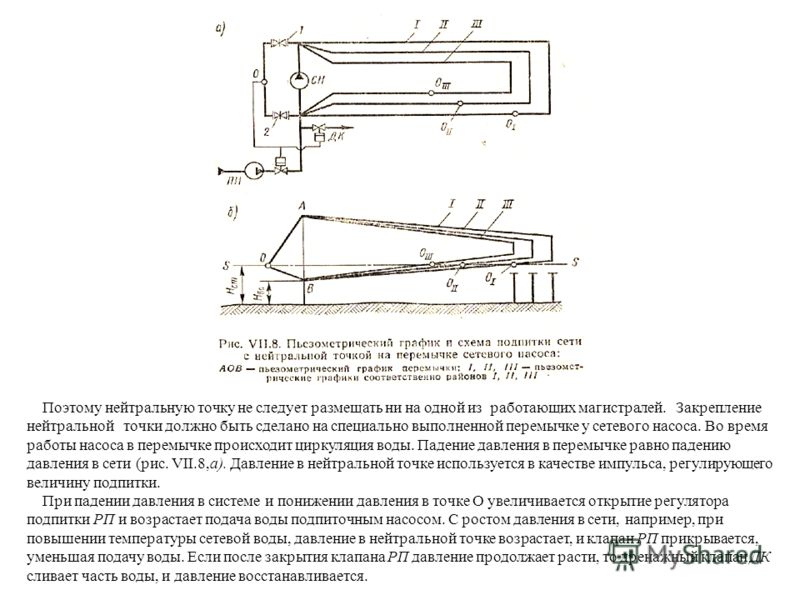
この中立点は本線には行きません。 中性点の固定は、ポンプでの切り替えの特別な表示で行うことができます。 ポンプがポンプの周りを循環するのに1時間かかります。 真ん中に万力を落とし、裾に万力を落とします(図VII.8、a)。 ピボットの量を調整するインパルスのような中立点vikorisovutsyaの万力。 システムが落ちた場合、ポイントの悪徳の減少RPの調整のレギュレーターの圧力の増加とポンプによる水の供給の増加について。 フッターの温度を調整する場合など、フレーミングでバイスを成長させるには、成長の中性点のグリップとRPバルブを取り付けて給水量を変更します。 RPバルブの圧力が閉じると、グリップが作動し、DKのドレンバルブが水の一部を注ぎ出し、グリップが導入されます。
裾のバイスの調整は、ポンプドライブの追加の制御バルブ1および2の後ろに接続できます(図VII.8a)。 それで、ポンプの濡れたパイプでバルブ1zbіlshuєバイスのゲートの別れは、それが成長するまでフレーミングでバイスを生成するためにschoします。 循環バルブ1が閉じたら、ウェットブランチパイプHでバイスを締め、バイスをポイントに保ちます。バイスは成長システムにあります。 p'-アイソメグラフは、それ自体と借用境界線と平行に丘を上っていきます。 テンプルキャンプ(Mal。VII.9、グラフ2)。 コントロールバルブ2(div。図VII.8)を閉じ、ライザーポンプのインレットパイプにバイスを取り付け、バイスを中性点に保ちます。 断面グラフがボーダーローの位置に移動します(グラフ3)。 測地ビューに大きな違いがある折りたたみ可能な設計では、グループが隆起した表面に取り付けられている場合、すべての加入者に対して静水圧バイスの1つの値を取ることはできません。 循環シンクでは、システムをゾーンに分割し、独立した油圧モードから分割する必要があります(図VII.10)。 主な中立点
CHネットのポンプ切り替えをロックします。 静的グリップSI S Iは、RP1の調整レギュレーターとピボットポンプPN1によって自動的にタッチされます。DodatkovaニュートラルポイントOIIは、ゾーンIIのリターンラインに移動します。 n_yを永続的にグリップすると、追加のレギュレーターのグリップがRDDSになります。 RDDSの上部ゾーンのヘッジとバイスで循環が固定されると、それは丸くなり、1時間でそれを閉じます Zvorotn_yバルブ OK、行に投稿します。 上部ゾーンは下部ゾーンから油圧で隔離されています。 上部ゾーンを制御し、補助ポンプPNIIとポイントOIIでのRPIIパルスの圧力制御のレギュレーターに従います。 §VII.5。 熱供給システムの水力学的モードでの温水供給のフラッシング重要な世界による熱供給システムの水力学的体制は、新しい給湯から敷設することです。 また、給水の不均一性、および給湯時の低水の硝子体の季節変化があり、システムの水力レジームが変化します。 ガラス質レギュレーターの期間中、viklikへの給湯の供給に変化があり、熱フェンスからの水への硝子体を変更します。また、オパールシステム、特にKintsevフェンスでも変更があります。 そのような場合の水力レジームの中央規制は、枯れてしまうために失われる可能性が高くなります 同じステップの私たちの生存者の灼熱の場所にビトラティを持っていきます。 opaluvannyシステムの比例規制については、以下の責任があると報告されています。同じの宛先; 2)コブ調整システムの場合、入力に硝子体水の渦がある場合、すべての加入者は、エレベータH neの前の給電線と、オパリンシステムおよびHの周りの渦パイプラインで同じグリップを持ちます。 。
大学での過剰な圧力を消すために、パイプラインに非難の導入が設置され、それはゾロトニーに与えられました。 価格のZvazhayuchi、すべての入力の圧力損失は同じです。 このようなシステムの油圧モード(図VII.11)は、1人の同等の加入者によるサーマルメッシュのモードと同等であり、導入された追加の硝子体の硝子体は実際のものにあります。 給水レジームに応じて、ガラス質の生垣の休閑を灼熱に戻すことができます。 rozrakhunkovyレジームの場合、rozrahunkovyの心を変えるときは、rivnシステムで副を握ります。
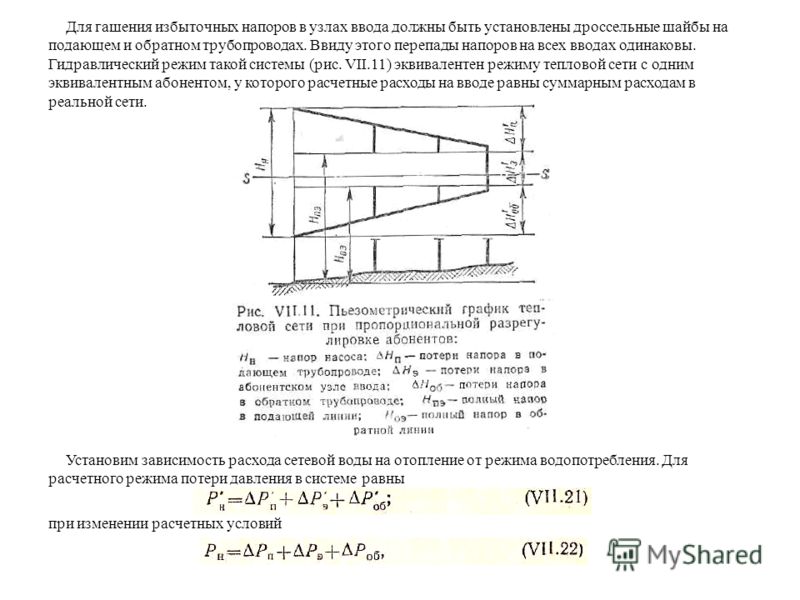
ポンプのDeP nrorakhunkovyグリップ。 ロズラクンコビについてのΔPp、ΔPe、ΔPは、明らかにメインラインでグリップを握っています。加入者の大学は、サーマルヘッジのロータリーパイプラインに導入されました。 P n、P p、P e、P非ラクンコビ排水のt値について。 もつ 閉鎖系ヘムラインのヴォディであるrosrakhunkovvitratの熱供給は、rosrahunkovのバッグが焦げたお湯の供給で硝子化した後に始まります。 Virazimoは、非ラシャンティックおよびロラカンキーレジームに硝子体ボディを使用することでバイスをつかみます。 二次休閑のurahuvannyaで、硝子体給水(VII.22)のグリップがviglyadu de V o、Vpで観察されます。 焦げた水の派手な水のVo、V g vitrati より熱い給水発疹のない心のために。 意味:φ= V about / Vo焦げた上の一般的な硝子体水。これは実際の硝子体に非常に高価です。取得した値の調整(VII.23)、ビューアでP =ΔPp/PeΔPpro=ΔPabout;ΔPpro=ΔPabout/ Pninvidnіvіdnіvіdnіvіdpіvіdpіvіdpіvіinpipingі zorotnyに与えられる熱フリッズと加入機関で。
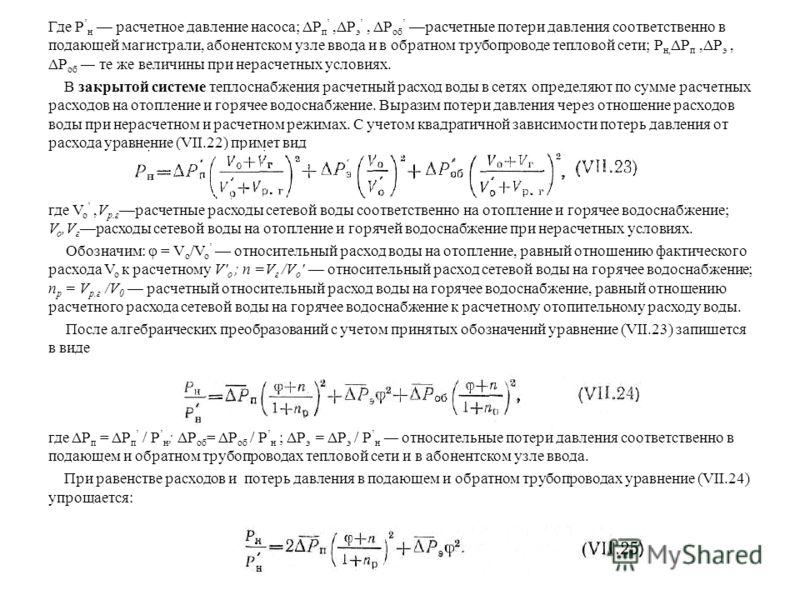
明らかに、焦げた水の硝子体は次のようになります:de a = P n / Pn。 主パイプラインで時折使用するための給湯の結果としての休閑地での焦げた水のvidnosnoїvitratiの変化と加入者の入力を図に示します。 VII.12。 Rivnyannya(VII.26)と図。 VII.12vyplyaє、しかしポンプの一定のグリップで、水の明確な硝子体と燃え尽きた成長があります
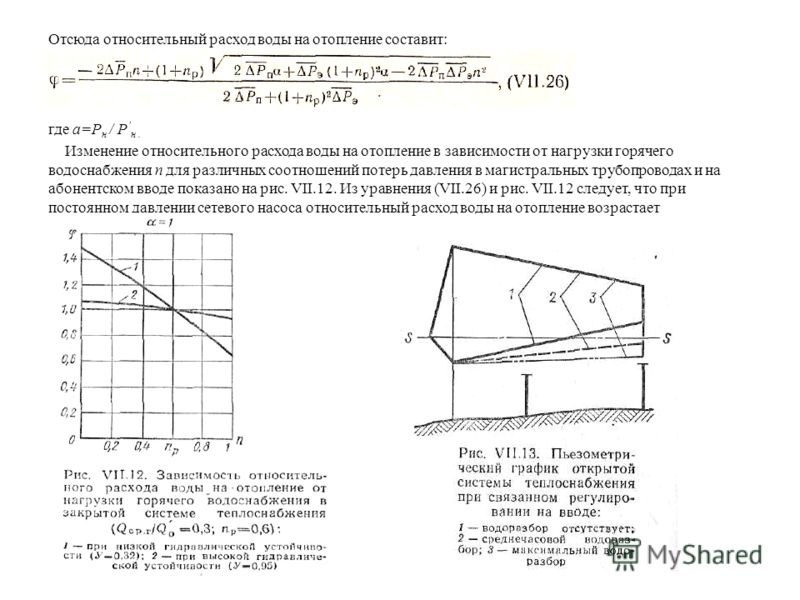
世界は給水が速く、しかも裾の水力効率が悪いのではなく、大きな変化があります。 Zbilshennya vitratiは、灼熱の熱に圧倒されます。 給水のほとんどは、給湯の並列回路と並列に生成されます。 双方向給水方式の場合、給湯から給水への給水を高速化するために、給湯注入に給水を含めるように変更した。 すべての重要なシステムで、水力レジームの熱伝導率は値として、および取水量の結果として保存されます。 タイドレギュレーションの原則に従って、硝子体RRのレギュレーターの加入者入力に設置すると(div。図IV。19)、硝子体はパイプラインに導かれるため、取水口に恒久的に供給することができます。 Vitrataは、vorotnyパイプラインをつかんで、給湯器の外側からパイプラインを敷設します。 取水量の増加中に、渦パイプラインでの水の硝子体が変化し、時にはそれが減少して新しいものにグリップします(図VII.13)。 硝子体調節剤の存在により、rorachuncateから進化する水分摂取量は、主要なパイプラインと不透明なシステムからの硝子体の変化につながります。 渦ラインからバットのフレーミングのバイスまでのVodorozbіrは、渦パイプ導管のバイスを交換します(図VII.14)。 あなた自身のハンドラーで、入力で明らかなグリップを成長させ、しばしば、不透明なシステムと与えられたパイプラインで派手な水の硝子体を押します。 オープンシステムの水力レジームの取水量と取水速度(VII.21)および(VII.22)の評価用。 許容できる、温度グラフt "n(div。図IV.24)の温度で、リンギング温度に供給されるパイプライン内の硝子体水を除去する方法。
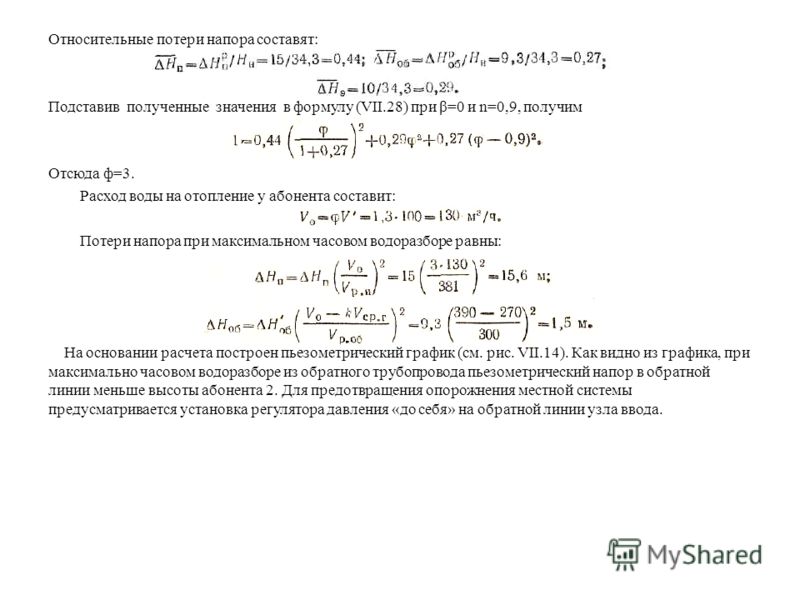
De Vp.g. rozrakhunkova vitrata vodi on a hot water supply; 供給されるパイプラインからの給湯の取水量のβ部分。 以前に受け入れられていたビラーゼの意味(VII.27)については、Z rivnyannya(VII.28)の形式に変換される可能性があります。 油圧モードでの取水口への入口は大きくなりますが、システムの油圧効率は低くなります(図VII.15)。 グラフからヤクがわかりますが、β= 0.5での取水量には、焼け焦げた水の硝子体はほとんど蓄積されていません。 給湯の流れを変えるためには、パイプラインからの専用取水口で給水システムを実施し、給水を行う価値があります。
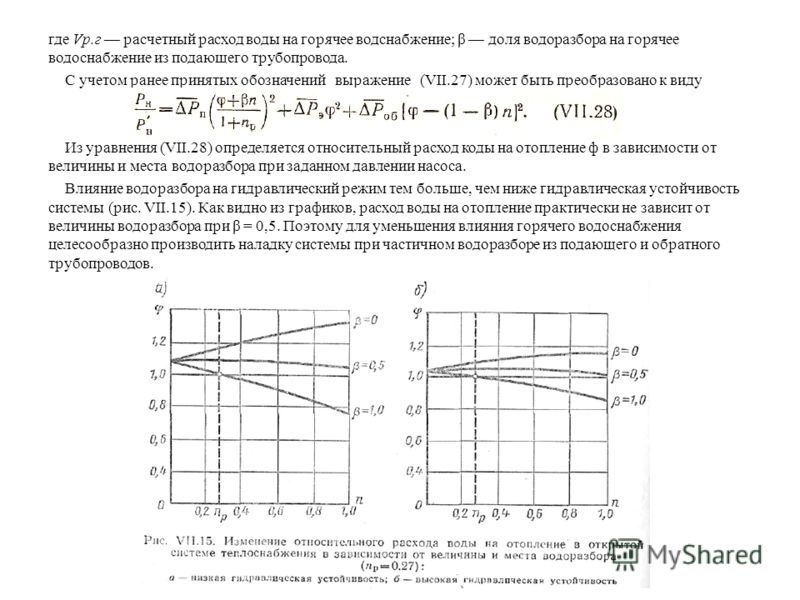
ベンチの値の振動は、給水量と蛇口内の水の温度に見られます。乳白色の設備(f = 1)で水を硝化した後は、グリップでのみ使用できます。ポンプの。 Rivnyannya(VII.28)f = 1vapingで私は副を握ります オープンシステムロータリーパイプラインからの最大自由取水量での熱供給。 Vitratiの給水はより高温であり、すべての加入者のより高温の給水は同じで等しく、V 0 = 100 m 3 /年、V ser.y = 45 m 3 /年(Q cp.y / Q 0 = 0.31)です。 1歳の神経質の係数k = 2。 システムの図とそのrorachunkovyn'-アイソメグラフを図に示します。 VII.14。 rozrakhunkuが受け入れる場合、ポンプヘッドは永続的であり、道路H n =34.3m。Rishennya。 渦に供給される水とパイプラインのRozrakhunkovvitrati: 最大水分摂取量でrozrahunkovyhの心のために
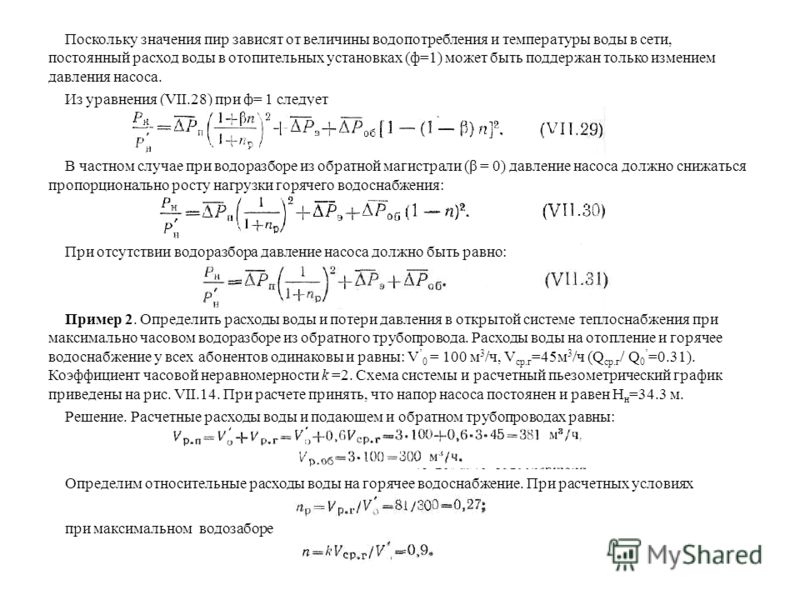
保存する圧力を撤回します。β= 0およびn = 0.9で式(VII.28)の値を送信すると、Zvidsi f = 3を確認できます。 加入者の灼熱につながるVitrataは次のようになります:最大年間取水量で圧力を下げるrіvnі:加入者のディスプレイにn'zometricグラフが表示されます(div。図VII.14)。 ヤクはグラフから見ることができます。回転パイプラインからの最大自由水摂取量では、回転ラインでの等尺性圧力は加入者2の高さに対して低くなります。
§VII.6ポンプおよびスロットルステーションで始まる油圧モード折りたたみレールを備えた優れたサーマルフェンスのロボットは、スタンドなしでは実質的に使用できません。 このサポートの助けを借りて、アクティブフェンスの処理能力の増加、油圧モードの増加、中央制御の測定範囲の拡大、拡張など、そのようなエンジニアリング施設の更新があります。 ポンプ場は、ポンプ場およびポンプ場に接続されている。 圧力を調整または下げるために、パイプライン上のPidkachuyupіdstantsіїvlashtovuyutsyaは、vorotnyhを供給します。 渦パイプライン上の生産ステーションは、それらが生き残るまで、または非常に長いフェンスの間、熱の直線での圧力解放の大幅な減少で移動することができます(図VII.16)。 ポンプ場を備えた油圧ヘミングモードは、加入者が導入したビトラチレギュレーターの存在によっても明らかではない方法で変化します。 いずれの場合も、ポンプ場のポンプがプラントに設置されているときのロータリーパイプラインのグリップを無効にすることができます 乳白色のアタッチメント..。 非自動加入者入力を備えたポンプ場ロボットに含まれており、フリンジ内の水の量を増やし、圧力を上げるために、動物学的ラインを成長させることができました。 そのため、暖房センターと暖房センターの間のディリアンカへの猛攻撃が変化しており、ディリアンカではそれが成長し続けています。 さらに、加入者システムの規制には一貫性がありません。 vitratiレギュレーター(РР)を使用した加入者入力では、フェンシングからのvitrati水を変更せずに、ポンプ場のスイッチがオンになります。 その結果、小さな箱ではありますが、p'zometric線は重要ではなくなり、渦パイプラインの圧力は圧力の量だけ減少するため、発電所のポンプで発生させることができます。 幹線にポンプ場を含めることで、中国の加入者への供給不足を改善する機会が得られます。 独立した油圧モード、折りたたみ式、リレー、小型の静的レールを備えた2つのゾーンで暖房グリッドを加熱するためのポンプS I SIおよびSII SII。 変電所のポンプの非常停止は、油圧モード2からモード1に変わります。 セカンダリゾーンIIのバイスは静的になります。 バイスがポンプの後ろのゾーンIの回転パイプラインに流れる前に、ポンピングすると、ポンプポンプの回転バルブが閉じます。その結果、ローバイスのゾーンIIが油圧で隔離されます。
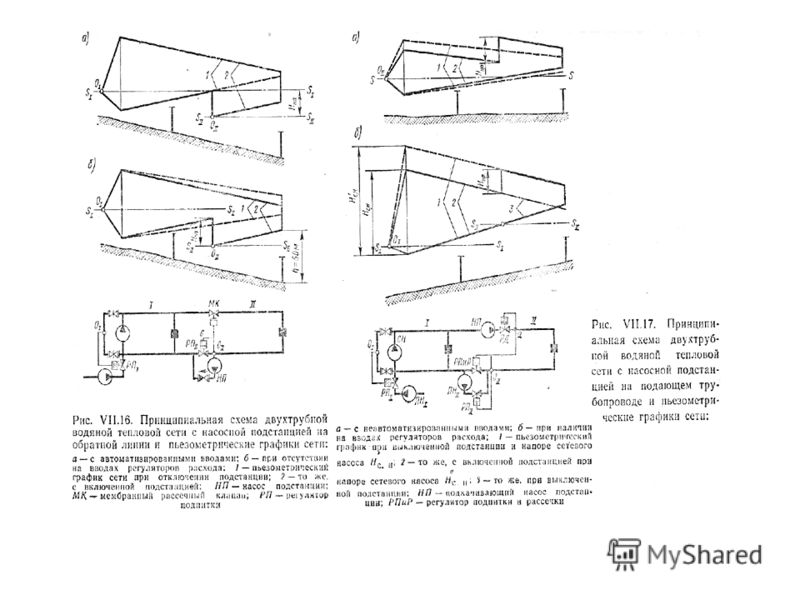
ゾーンI.ゾーンIIの位置合わせと、それらでの静的バイスS II S IIの作成は、大きなグリップの下にあるゾーンIの渦線から、グリップの低いゾーンへの水の自動バイパスによって機能します。 、レギュレーターを追加。 パイプライン上のポンプ場は、供給されるように、最後まで熱の直接的な形で、またジョイントの長さが長い場合に、大幅な圧力解放で停止します(図VII.17)。 火力発電所と住んでいる人々の測地マークの発見は、数十メートルから数百メートルにもなる可能性があります。 すべての人に1回の静的な猛攻撃を加えることで、一部の生存者のvyporozhneniyaと、一部の生存者のopaluvalnyアタッチメントを粉砕することが可能です。 さらに、サーマルフレーミングは静的関連ゾーンの近くで正方形に分割されます。 ゾーンIIの静的モードは、必要なヘッドHvpを備えたロボットポンプPNIIによってトリガーされます。 ステーションの所有、熱供給のポンピングのための電気エネルギーの硝子体の増加、およびパイプラインの開通の必要性、熱がびしょぬれになるまで加入者の所有が最も近いものに入力すること。 パイプラインにポンプ場が含まれているため、グラフィカルな線は、vitratiレギュレーターの加入者入力を表示せずに変更するというプレッシャーにさらされています。 理由は、scho viclikayutが、回転パイプラインについて説明したものと同様に、nakhilivn'zometricラインを変更することです。 ポンプの圧力を変更して、N n.p.をポンピングするために、ゾーンIIのフェンスに必要な間接圧力を設定することができます。 ゾーンのスプレーとチェックの2番目のザヒストは、レギュレーターの助けを借りて実行され、RPとR、およびRDのグリップにあるレギュレーターの設計が行われます。 ポイント内の圧力が低下すると、ポンプはポンプによって吸い上げられ、次にポンプレギュレーターとバイスが閉じてヘッジゾーンIIがオンになり、連続静圧S II SIIがポンプIIに適用されます。 Pidkachuvalnіpіdstantsіїは両方の高速道路に同時に設置することができます。 ポンプの生産性は、ポンプを使用しているときに、ポンプの設置時に壁の硝子水を吸収します。 ポンプタイプHn.p. Zmіshuvalnypіdstationsは、高温グラフからの移行によって低水の温度を下げるために使用され、低水流のより低い経路を調整します。 トランジットパイプラインは、トランジットライン(図VII.18)またはトランジットパイプラインに設置されます。 ポンプを使用する場合は、ポンプと回転パイプラインに設置する必要があります。また、供給されるパイプラインに設置されたバルブにリング水を供給するための悪臭を使用する必要があります。
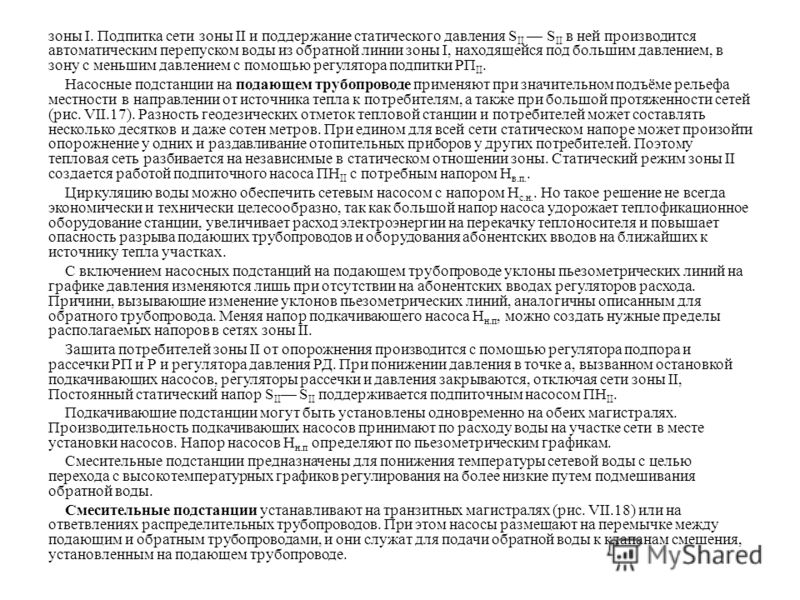
電気生産ステーションの設置の中心では、境界は2つのゾーンに分割されます。高温(ゾーンI)と低温(ゾーンII)の温度と熱伝達圧力です。 ゾーン間には、小さな圧力降下Hp.sがあります。 通常のロボット作業では、パイプライン内の電動ポンプの圧力を510mに変更する必要があります。 与えられたパイプラインの流量に基づくkofіtsієntzmіshuvannya; τ1、s、τ2、s、リンギングメッセージに供給されるパイプラインのリードの温度。
ポンプがオフになると、バルブKSiRが閉じ、ゾーンIとIIが油圧で開きます。 ゾーンIIの水の循環がパイプラインで固定され、それが渦に与えられると、グリップが確立されます。これは、ゾーンIの終わりにある渦パイプラインの万力によって開始される必要があります(モード、 p'-点線の等尺性トラフィック)。 Zmіshuvalnіpіdstantsіїは、作業エリア(ゾーンII)の自律的な熱供給によく使用され、サーマルフェンシング(ゾーンI)に接続できます。 工業企業、規制の温度グラフを採用している人のために、居間の容認できない灼熱。 Zmіshuvalnіpіdstantsії偉大な2本のパイプ(div.§XI.9)で最も効果的であり、 ワンパイプシステム遠方の熱供給(div。図II.7)、主亀裂がローカット水の温度が150°Cであり、大規模なグループが住んでいる場合、ある温度でローウォーターをビコリストブバトすることはできません150°Cの。 Drosolyuchіpіdstantsіїvikoristovuyuは、測地マークに大きな違いがある領域で成長した生存者のグループへの熱の悪を減らすために。 メインフェンスの端(図VII。10)または背中から背中のグリップを変更します。 このような生産ステーションは、単純な休耕計画のための乳白化されたアタッチメントの典型的なアプリケーションを使用して停滞しています。 下部ゾーンIでダイナミックバイスを使用して、レギュレーターを備えたスロットルステーションでバイスを取り、ボルテックスパイプラインに取り付けたとします。 ゾーンIの渦線近くのバイスが60m変化しない場合は、バイスレギュレーターをスロットルヘッドH r.dに調整します。ゾーンIIで発射されたシステムは、パイプラインの補助バルブの後ろにある循環ヘッジの接続部に排出されます。ステーションに設置された電源ポンプPNIIに供給されます。
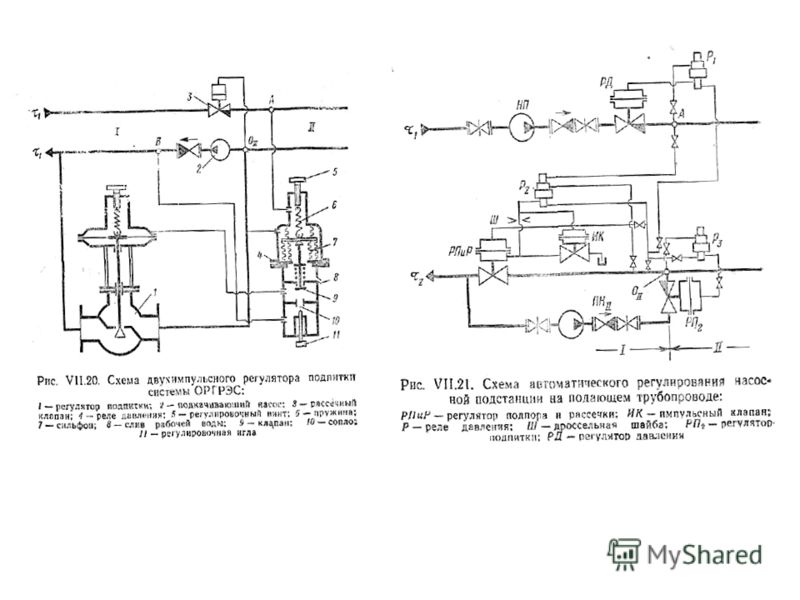
§VII.7。 ポンプ場の自動化サーマルフェンスの無事故ロボットは、冗長性の形をとっています。 自動化のための最も重要なプラントの1つは、増大する圧力からゾーンを油圧で隔離する必要性です。 サーマルネットワークの緊急バルブをオンにすると、
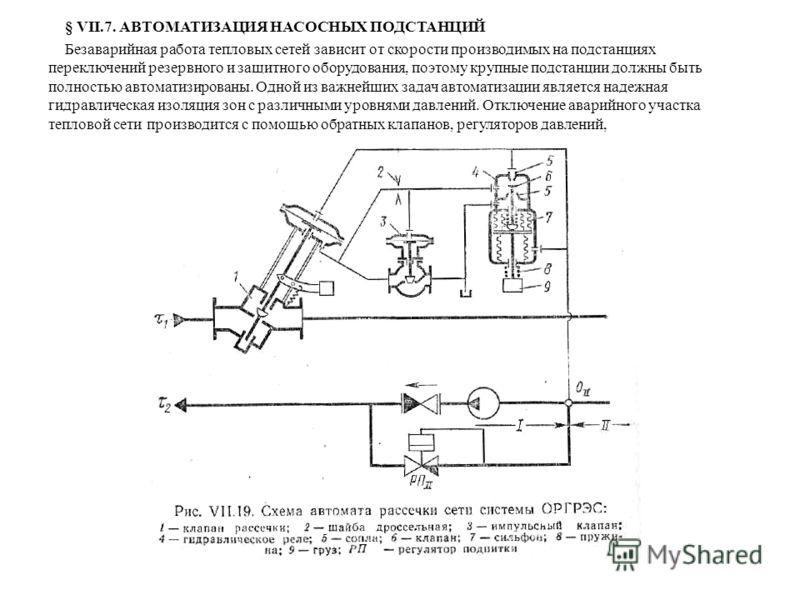
そしてまた特別な自動機械。 図では。 VII.19ロータリーパイプラインのポンプ場とフレーミングを緊急接続するための自動機械のスキームが導入されました。 自動機の原理は、図のピエゾメータグラフのお尻から見ることができます。 Vii。 16.グリップを中立点IIまで押すと、油圧リレーのバルブ6(図VII。19)が丘を上って移動し、上部ノズルがねじれます。 バルブが開き、バルブの膜の下の空から水がこぼれ、大気のグリップが得られなくなります。 yogo zakrittyaまで、バルブメンブレンrazsіchennyaprizvedeの上の空いているシートの高いグリップ。 ゾーンIIの裾の循環を固定し、グリップを静的なS II SIIまで下げる必要があります。 ロータリーパイプラインゾーンの他の万力の前に、ポンプの前にあるロータリーバルブを閉じます。 バルブ間のインパルスライン上のスロットルウォッシャー2、リレーの拡張、ダイヤフラムとインパルスバルブ3のバルブに行く圧力差の増加、開く前の空のバルブの空の急速な時間。 ヘッジで循環が更新されると、リンギングアクションが取り付けられ、バルブが開きます。 機械の調整は、リレーバイスのスプリング8とバンテージ9を選択することにより、ニュートラルポイントIIでリバースバイスの形で実行されます。 油圧作業員の指導のために、国境をイメージした教育システムが自動的にシステムに統合されます(図VII.20)。 成長レギュレーターの応答に対するインパルスは、ポイントAから供給されるパイプラインに到達します。 ポイントAのバイスをニュートラルポイントのバイスのレベルまで下げる2番目のサイクルについてバルブ9は、リレーバイスの上部ノズルの近くまで上向きに移動します。その結果、オーバーメンブレン上でレギュレーターが空になります。 、1。..。 バルブ開口部の値は、ノズルに導入された補助ヘッドの後ろで調整されます。ポイントとレギュレーター1の空の膜の間のラインのスロットルフロー。締め付けグリップの調整は、調整によって実行されます。圧力リレーのネジ5。 供給されるパイプライン上のポンプ場の自動調整(図VII.21)は、ビクトリア朝の調整アタッチメントに取り付けられており、その設計は図1に示されています。 Vii。 19、VII。20。 レギュレーターバイスRDは、上部ゾーンのフェンスでバイスを取り、ポンプで送られるポンプNn.pの油圧特性とゾーンIIのレベルのバイスのレギュレーターの油圧油圧サポートを使用します。 レギュレーターは、ポイントAおよびProIIのバイスで2パルス回路のスイッチをオンにすることができます。 ヤクレギュレーターは、中性点IIの万力の衝撃によって駆動されるように調整できます。 同時に調整レギュレーターを持ってくるためにポイントAの緊急万力、リレーР2を介してウィックしてパルスバルブを開き、調整レギュレーターを閉じます。 レギュレーターの調整は、通常のロボットの場合と同じ直径のワッシャーを開くことによって行われます。
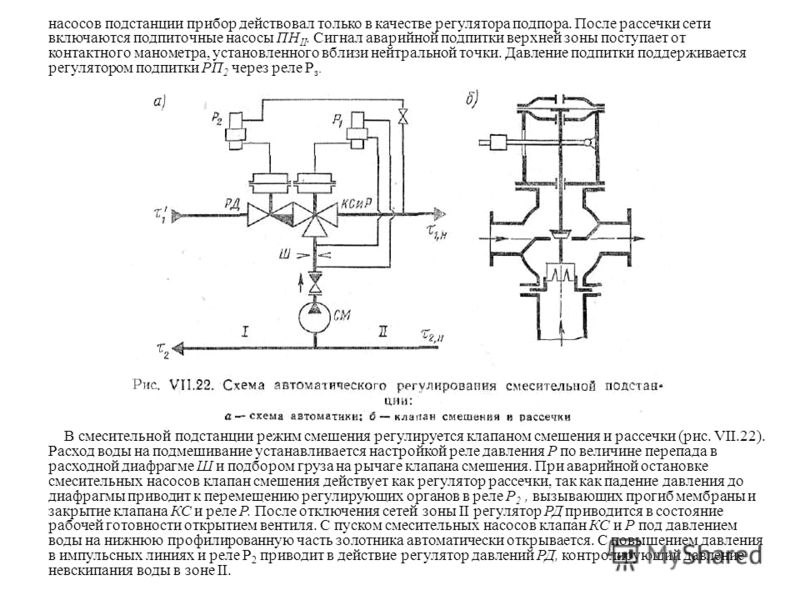
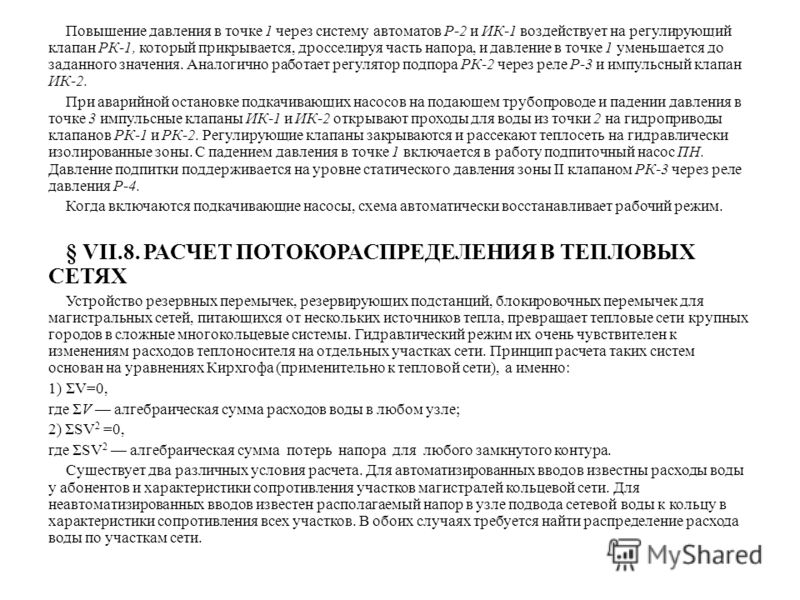
pidstantsii prilad deyav lisheyakレギュレーターpidporuをポンプします。 ヘッジが開発されているとき、ポンプと空気圧バルブPNIIがオンになります。 上部ゾーンのアラーム信号は、中性点の近くに設置された接触圧力計から発生します。 pidzhivennyaのグリップは、リレーRzを介してpidzhivennyaRP2のレギュレーターによって採用されます。 変更可能なステーションでは、変更モードは切り替えバルブによって調整されます(図VII.22)。 ビトラタは位置の変化につながり、ビトラダイヤフラムWでの降下の大きさに合わせてリレーをバイスPに調整し、変化のメインバルブの見晴らしを良くします。 シャッターポンプが緊急停止した場合は、P 2リレーの制御要素を変更する前に、ダイヤフラムへの圧力を下げるために、スタンドオフレギュレーターに対して切り替えバルブを作動させてから、ダイヤフラムロックをオンにする必要があります。バルブのリレーを閉じます。ロボットがバルブを表示する準備ができています。 ポンプを始動すると、スプールの下部プロファイル部分のグリップによってバルブKSとRが自動的に開きます。 インパルスラインとリレーP2の調整バイスを使用して、ゾーンIIの非沸騰バイスを制御するレギュレーターでRDバイスを駆動します。
図では。 VII.23マッドポンプおよびスロットルステーションの自動化のスキームが導入されました。 リレーの動作モードでは、R-4バイス、PK-3バルブ、調整バルブB1およびB2による自律型ケルバニヤのバルブが閉じられます。 ポイント3のバイスは、出口P-1のリレーに送信され、上部膜からパルスバルブІЧ-1およびІЧ-2が空になります。 曲がると、膜がロッドを動かし、バルブをオーバーライドする下部通路のオーバーカーブを増加させます。 パルスバルブІЧ-1とІЧ-2の上部通路はそれに応じて増加するため、バルブRK-1とRK-2は調整モードで動作します。
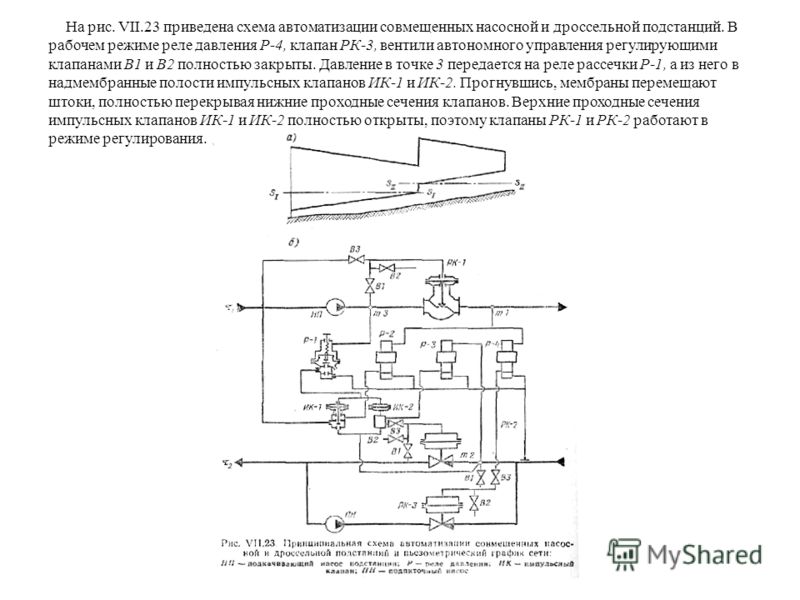
自動装置R-2とICh-1のシステムを介してポイント1のバイスを調整すると、ねじ込まれたRK-1調整バルブに注入され、圧力のスロットル部分がポイント1のバイスに変わります。与えられた値。 同様に、P-3リレーおよびICh-2パルスバルブを介してRK-2を供給するためのレギュレーター。 パイプラインの圧力ポンプが緊急停止した場合、それが供給され、パルスバルブІЧ-1およびІЧ-2のポイント3の圧力が、ポイント2から油圧ドライブ1およびバルブ2。 調整バルブが閉じられ、熱交換器が油圧で隔離されたゾーンに接続されます。 ポイント1でグリップが落ちると、PNポンプがロボットに接続されます。 バイスpidtrimunyaは、リレーバイスR-4を介してバルブRK-3によってピボット上のゾーンIIの静的バイスを奪われました。 ポンプが接続されてポンプアップされると、回路は自動的に動作モードに変わります。 §VII.8。 ROZRAHUNOK POTOKOROZPODILU at THERMAL INTERFACES予備のジャンパー、バックアップステーション、メインフェンスのブロッキングジャンパーの取り付け。これは、熱のデシルコとして生きることができます。 サーマルヘム折りたたみシステムの近くの素晴らしい場所。 油圧モードは、ハリネズミの端にある熱伝達硝子体を変化させるのにさらに敏感です。 Kirkhhoffレベル(100パーセントの熱生垣)でのそのような播種システムの開発の原則ですが、それ自体は次のとおりです。 2)ΣSV2= 0、deΣSV2は、任意の圧力を犠牲にして代数的な量です 閉ループ..。 Існуєдізніは数珠を気にします。 加入者のビトラティの自動入力とリングフェンスのメインラインのサポートの特性。 ヴィドミーの非自動入力、大学での直接フロー、すべてのボックスのサポートの特性でサークルへのローカット水の供給。 両方のvipadkiで、ハリネズミのvodiのrozpodilvitratiを知る必要があります。
最も単純なキルツェボヘッジのバットの加入者入力にビトラティレギュレーターがインストールされている場合、一見したところ明らかです(図VII.24)。 図に示すように、Zadamosyaはかなりの硝子体とまっすぐな水の流れです。 大学からの正の水の流入を取り、年の矢の後ろの輪郭の近くを通過しなければならないビトラティの圧力を無駄にすることができ、負の圧力で、大学からの水の流れとビトラティの圧力を無駄にすることができます。それは年の矢に逆らって通過します。 最初のKirkhhoffのライバルと頑張ってください。別のrivnyannyaに活気のある直接の流れがある場合は、触れないでください。そのdeΔPは悪徳に結びつきません。
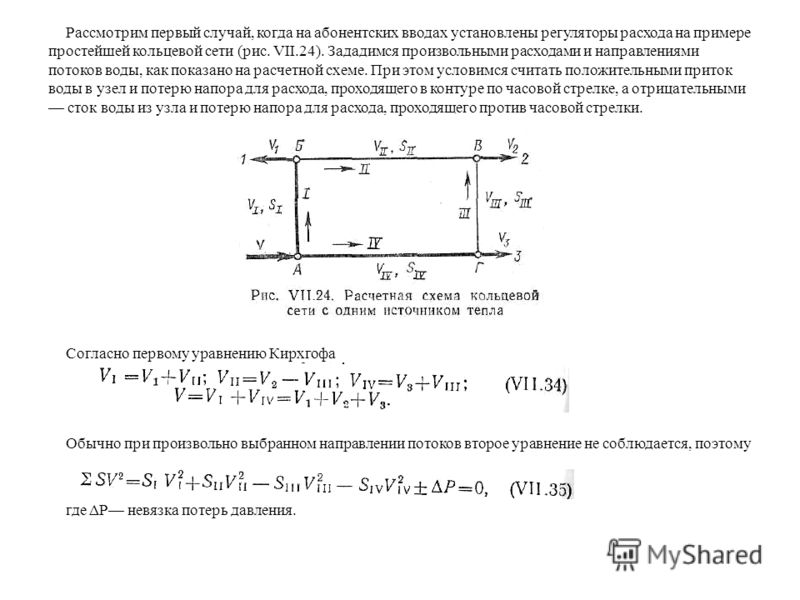
0)古い家のすぐ隣にあるボックスI、IIとボックスIII、IVの未完成のものの再配線について通知します。 白癬に関する頭圧の不一致の負の大きさ。 usunennyaの場合、 "title ="(!LANG :(!LANG:正の値ではない'язкового напору (ΔР>0) свідчить про навантаження ділянок I,II у напрямку годинникової стрілки і недовантаження ділянок III, IV. Негативна величина нев'язки напорів вказує на зворотне. Для усунення нев'язки напорів при" class="link_thumb"> 38 !}!}非粘性の猛攻撃の正の値(P> 0)は、道路の右側にあるボックスI、IIの圧倒的量と、ボックスIII、IVのアンダーマウントについて示しています。 白癬に関する頭圧の不一致の負の大きさ。 ΔР> 0での圧力差を減らすには、古い矢印の後ろに水を一滴垂らしてI、IIのビトラティを変更する必要があります。III、IVでは、同じ量の非ビビッドでビトラティを変更します。 vitrati。 Vvazhaєmo、ガラス質のΔVに関してryvnyannya(VII.35)に導入された場合、他のvnyannya Kirkhhoff vikonuu:Virіshuyuchituіvnіstіvnіvnіyuchіvіvnіtіvіvnіzuvіvnogoіvnyanyіv2 日付の修正を導入し(VII.36)、再検討を再実行し、日付の新しい、より大きな修正の意味を明確にします(VII.37)。 0)古い家のすぐ隣にあるボックスI、IIとボックスIII、IVの未完成のものの再配線について通知します。 白癬に関する頭圧の不一致の負の大きさ。 "> 0)での圧力のずれを減らすために、右側のヘッドI、IIの再配線と、ヘッドIII、IVのアンダーウェッジについて示します。圧力の不一致の負の値が必要です。収益率で。ダリャンカスI、IIのビトラチは、1年前の矢印の後ろに水が落ちることで変化し、ディリアンカスIII、IVのビトラチは、非粘性ビトラチの1つの値だけ変化します。値は常に正です。」 > 0)家の右側にあるボックスI、IIの圧倒的な量と、ボックスIII、IVの取り付け不足について示します。 白癬に関する頭圧の不一致の負の大きさ。 usunennyaの場合、 "title ="(!LANG :(!LANG:正の値ではない'язкового напору (ΔР>0) свідчить про навантаження ділянок I,II у напрямку годинникової стрілки і недовантаження ділянок III, IV. Негативна величина нев'язки напорів вказує на зворотне. Для усунення нев'язки напорів при"> title="正の値nev'язкового натиску (Р>0) свідчить про перевантаження ділянок I,II у напрямку годинникової стрілки і недовантаження ділянок III, IV. Негативна величина нев'язки напорів свідчить про зворотне. Для усунення нев'язки напорів при"> !}!}
したがって、より明確にした結果、プレートと給水ポイントに水汚れが残ります。 生け垣が2つ以上生きている場合、ウォーターポイントは同様のランクに成長します(図VII.25)。 水のポイント(ポイントB)と折り畳み式の他のレベルのカークホフへの設定:De H 1H 2 =ΔHCHP1とCHP2に設置されたクロスカットポンプの圧力差。式(VII。 で 積極的に非粘性バイス(ΔР> 0)水の流れのポイントは、TEC 2の側(ポイントC)にあるため、再絡み合いは、I、IIのボトル、および多数のボトル上の水のビトラのように見えます。変更に責任があります。 非粘性バイスの負の値(P 0)水の変化点はbik TEC 2(点W)であり、再絡み合いの破片がボトルI、IIに現れ、ビッチのガラス質ドライブは変化するのに十分ではありません。 非粘性バイス(P)の負の値> 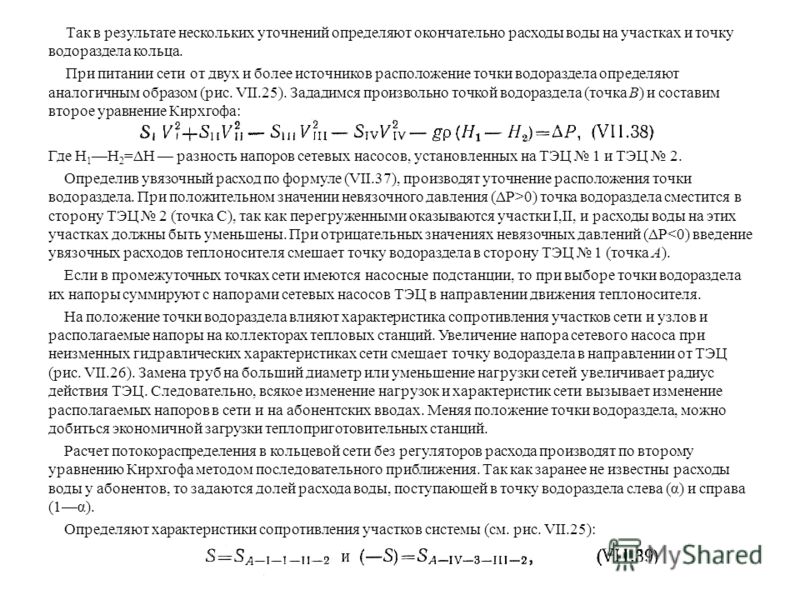
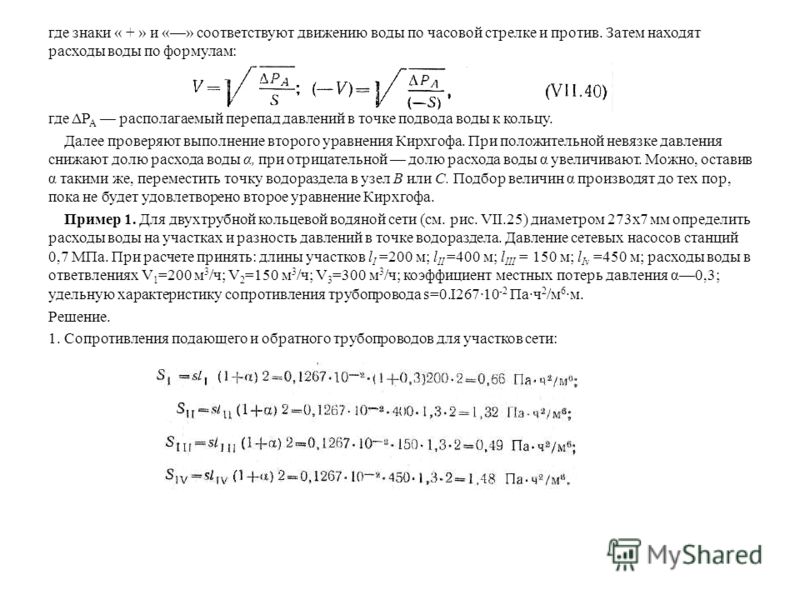
デサイン「+」と「」は、今年の矢の後ろと反対にゴキブリを導きます。 式のリードのビトラティを教えてください:deΔPそしてグリップのドロップ、サークルへのリードの配信の時点でどのように成長するか。 別の家族のカークホフのリストを修正させてください。 緊張が正に不足している場合、水のビトラティの一部を下げ、ビトラティの負の部分を下げると、増加につながります。 そのようなfでαを超えた後、他の等しいカークホフが満たされない限り、αの値のポイントを大学またはS.Pidbirの水に移動して静かな時間まで保持することが可能です。 添付資料1.直径273x7mmの二重管リング水メッシュ(div。図VII.25)の場合、プレート上の水のビトラの量と水点でのグリップの違い。 ステーション0.7MPaのヘミングポンプのバイス。 razrahunkuが受け入れる場合:dozhini dilyanok l I = 200 m; l II = 400 m; l III = 150 m; l Iv = 450 m; vidgaluzhennyakhでのvitrativodi V 1 = 200 m 3 /年; V 2 = 150 m 3 /年; V 3 = 300 m 3 /年; kofіtsієntmіscevіhvtrataviseα0,3; パイプラインのサポートのピッチ特性s = 0.I267・10 -2 Pa・h 2 / m 6・m。 決断。 1.開窓用のフィードパイプラインとロータリーパイプラインの決定:
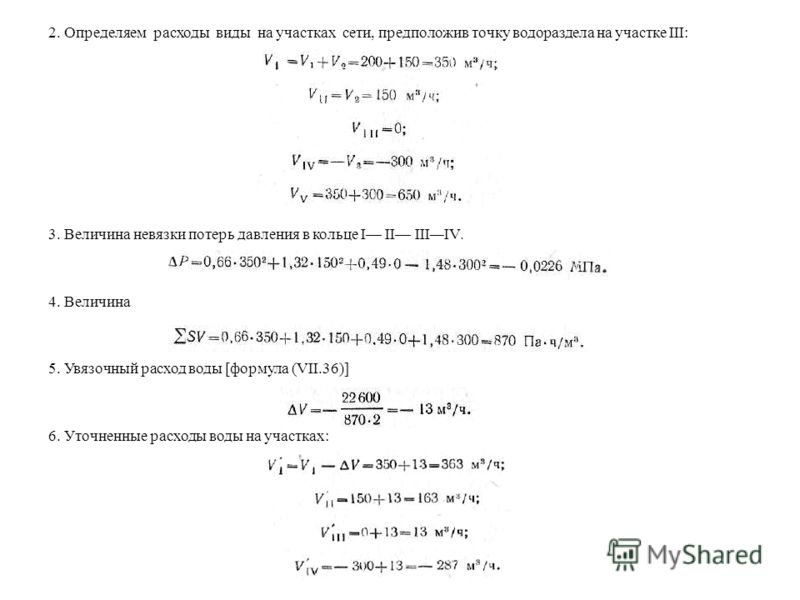
7.繰り返しますが、バイスのミスタイの大きさΔР "=(0.66・、32・、49・13 2 1.48・287 2)= 210 Pa = 0.21・10 -6 MPa小さいので、使用できます。 、したがって、ポイントGまで水を取り込むことができます。8。ステーションからホールの日付までの圧力N°39。接続ポイントから接続ポイントへの接続ポイントへの接続ポイントでの圧力接続ポイント3アプリケーション2.水を2つの2dzherel熱のポイントに持っていき、給水ポイントでの圧力の上昇を確認します(div。fig、VII.25)受信時:加入者からの水ビトラティVA = 300 m 3 /年; VB = 200 m 3 /年; VC = 500 m 3 /年;メインラインdylanoksのサポートの特性:SI = 5 Pa・2年目/ m 6; S II = l、5 Pa・2年目/ m 6; S III = 0.6 Pa・2年目/ m 6; / m6;リシェニヤステーションのコレクターの圧力差1.加入者Bへのゲートウェイでの給水ポイントを尋ねた後、ヘッジラインで水を回すことが知られています:
2.バイスのミスタイイングバイスのミスタイイングはネガティブであるため、皿の再包装に配置され、熱の中で生きることができます。 4.本線のvodirozcoliの明確化: