n1.docx
1.空気圧viconavchіが手配します。 空気圧シリンダー、ロータリーおよびタービン空気圧モーター。空気圧追加-ガスを拾うのがより頑強であるpristіyに電話してください、 体力ガスは、ハードレーンの表面にあるviglyadіバイス、またはviglyadіの空力効果に現れます。
空気圧ドライブこれは、相互接続された空気圧部品のシステムであり、機械のロボット器官またはメカニズムのロボットレーンのラフ用に設計されています。 ドライブの空気圧システムは、空気圧ライン(パイプライン)およびメカニズム(ヒンジ重要、ギアタイプ、カムのような)で結合できます。
Vikonavchі圧縮されたチートのエネルギーを機械のロボット器官のエネルギーに再実装するためのアタッチメント。
空気圧モーター(ピストン、回転、チャンバー(バルーン))の最も普及しているナブリ。
空気圧モーターは、他のツール(ドリル、レンチ、 ハンマーから、shlіfuvalnyhヘッド)、ロボットが振動のない機械(購入したガス、鋸刃付き)から安全であることを確認してください。
2.空気圧ドライブの基本要素と図。
空気圧駆動-圧縮食品の追加エネルギーのための機械とメカニズムの崩壊を目的とした別館の吸引。 エレメントを空気圧ドライブにバインドすることにより、コンプレッサー(空気圧発電機)と 空気圧モーター .
基本的に、機械式トランスミッションなどの空気圧ドライブの指定は、ドライブモーターのタイプとそのパラメーターに応じて、ドライブモーターの機械的特性を再適応させ、ドライブモーターを調整することです。 。
ザガロム、空気圧ドライブでのエネルギーの伝達には、次のランクが与えられます。
駆動モーターは、作動ガスの動力を担うコンプレッサーシャフトにトルクを伝達します。
調整装置を通る空気圧ラインによる特別な準備のための作動ガスは、 空気圧モーター、空気圧エネルギーは機械に変換されます。
作動ガスが市の中心部に送られるとき、 働くリディーナ油圧ラインに沿って、油圧タンクまたはポンプのいずれかに回します。
空気圧ドライブの典型的な図

空気圧駆動の一般的な図:1- povitrozabirnik; 2-フィルター; 3-コンプレッサー; 4-熱交換器(冷蔵庫); 5- vologoviddiluvach; 6-povitrozbirnik(レシーバー); 7 - 予備のバルブ; 8-ドロセル; 9- oilozsiluvach ; 10 - 減圧弁; 11-ドロセル; 12-ローズウッド; 13空気圧モーター; Mマノメーター。
を介して空気圧システムに変わります povitrozabirnik .
ドライブ内の要素の消費を改善し、摩耗を減らすために、劣化のzd_yysnyuクレンジングをフィルタリングします。 コンプレッサーzdіysnyustisnennyapovіtrya。
Oskіlki、シャルルの法則のzgіdnoは、コンプレッサーpovіtryamaєに圧迫されました 寺院の温度次に、スピリッツ(原則として空気圧モーター)に食べ物を提供する前に、熱交換器(冷蔵庫)で冷却します。 vologoviddiluvach.Povіtrozbіrnikは、圧縮された風のステムストックとして、また空気圧システムの脈動グリップを滑らかにするために役立ちます。 脈動プロセスには、システムに部分的に供給する大型コンプレッサー(ピストンコンプレッサーなど)のロボット操作の原理が備わっています。 オイルブラストジャミングでは、空気圧アクチュエータを基本的な部品でこすることによって何を変更するかを知っているマストヘッドを取得するだけで十分であり、ジャムになります。
空気圧アクチュエータには粘性接続があります 減圧弁、空気圧モーターまでの圧縮風の供給を一定のバイスで確保します
Rozpodilnikkeruєrukhomvikhіdnyhlanok空気圧モーター。
空気圧モーター(空気圧モーターまたは空気圧シリンダー)では、圧縮されたエネルギーが機械的エネルギーに変換されます。
3.空気圧ロゼットアタッチメント。
Zvorotnі空気圧バルブは、1本の直線だけを絞ったねじれを通過させるように設計されています(図5.25)。 バルブ3はボディ2にあり、バルブスタンドはスプリングで押されています 4
座席へ(カーテンの開口部5から開口部1へ)1。 穴/バルブ3にターンを供給するとき、それはシートの側面から引き出されます。 
スラリースワールバルブ(Mal。5.20)スワールラインのサポートを変更することにより、空気圧ドライブの進歩に役立ちます。 このようなバルブの停滞(図526、c)は、スプリングの空気圧シリンダーステム/ピドログの流動性の膨張を防ぎます。 空気圧バルブ5がオンになっているとき、パイプラインを介して空のピストンシリンダーを通過するクイックスワール7でバルブを通過するのはタイトではありません。 2 % 固定されていないピストンの切り替え。
パイプラインでのvimikannypneumoscopy5副の場合 4 padaє、shvidkogo vikhlopのバルブが切り替えられ、パイプラインを除いて、空の空気圧シリンダーから大気へのヒアリングの放出が防止されます 4 іісвмораспрессігель5まで。
図では。 5.26、aはスワールスワールバルブのrxewaを示しています。 Otvir 2 シリンダーが空になるまでバルブが押し下げられます。 コンセントの横から、開口部/に持ち込まれます。 大気圏に戻るために3を開きます。 図では。 5.26では、空の空気圧シリンダーが順番に圧迫されたときに、バルブの位置がshvidkyvikhlopに示されます。 図では。 5.26.6は、シリンダーヘッドがすばやく空になったときのバルブの位置を示しています。
後の空気圧クランプ制御されたバイス(差動バイス)が所定の値に増加したときの空気圧信号のゲート供給のための空気圧制御システムにおけるバイス(差動バイス)の動作サイクルの制御の指定。 このようなバルブは、バルブをピックアップできない場合(たとえば、ピストンストロークの変更など)に、システム内で空気圧でケロベートされたユニットを混合するためにも使用できます。


図では。 5.27は、アクティブポストフローバルブの設計によって誘導されます。 信号は、穂軸まで、そしてピストンがシリンダー内にあるとき、3)の前で不自然です-差動ピストン2はトレンであり、その空は開いた状態(C pの開いた状態)とviklopnoiから解放できます(オープニング C th ) シリンダーを空にします。 だから、穂軸が残るまでヤクします。シリンダーのピストンが上がると、空になるバイスは少なくなり、ストロークの終わりには、差動ピストンが低くなります。 2 オンライス..。 5.27。 Pnsvmoklapapは最後にうまくいけば落ち着く
上部はスプリング3で配置され、ネジ5で調整でき、むち打ちの万力で、大きなピストン領域で使用できます。 2.
シリンダーピストンの通路を極限位置とスロットルに押すことにより、空の空のグリップはメインラインのグリップを維持し、旋風の空のスペースは大気の空のスペースに維持されます。 ピストン2の結果として、スプリングを適用します3>下に移動してshtovychachを通過します 4 バルブを交換し、自分で出力0をリビングチャンネルに接続します P。 出力では、空気圧信号が設定されます。これを使用して、空気圧シリンダーまたは オウム回路の要素。
4空気圧部品
バイスとビトラティックグリップを備えたkeruvannya用の空気圧デバイス
情報(入力)添付ファイル、論理および数値添付ファイル、および圧力のrosodilniks。
回転弁。
vitratiを調整し、
バルブバイス
ロックされたバルブ
Rozpodіlnikiraznyat
提供されたラインの数に対して2ライン。 ライン。 4行など
いくつかの位置については、2つの位置を3つの位置などに変更します。
機械式ケルバンを備えたm'yazyケルバンと電気式ケルバンを備えた空気圧式ケルバンでラフにする方法について
バネ仕掛けの回転から、補助バイスの後ろの回転から、位置がずれた状態で回転する方法について

ライス23-ローラー花瓶付きロゼット、3 / 2-嘆き悲しむことができるローラー花瓶付きストランド。
入力信号に基づいて表示される、入力信号を検出または検出するためのアプリケーションでのヤク論理計算アタッチメントrozpodilnik vikoristovuyutsya

ご飯25 空気圧 5G-両面からのprosodilnik空気圧 追加マニュアル管理
Zvorotn_yバルブ
ゲートバルブは一方向に固定されます。原理は、たとえば、渦巻く渦巻きのバルブや「ABO」の論理要素に見られます。

図26スイングバルブとバルブ
Vitratiを規制する
Vitratiレギュレーターまたはスロットルロックまたはスロットルロット*そして圧縮された噛み物の硝子体とまったく同じケルによって。 droseluvіmknutiで Zvorotn_yバルブ、したがって、右側の1つに硝子体があり、反対側の右側に最大の硝子体があります。


図29 1時間のショーケースバルブ
スロットルグウェントの調整から落ちて、来ることがもっとあります、またはmenshavitratpovitrya。 バイスの必要なグリップに到達するために、^-prozodilnikが時間の経過に含まれています。 その場所に勝ちます。 ドックはkerovannyaに信号を送ります例えば、導入されるバルブの数を入力する倉庫への他のモジュールまで
2つの入り口があるkeruvannyaを別館、
tact_vのエミッタ。
タクトランサー。
別館メモリ
詳細の準備における技術プロセスの包括的な機械化と自動化は、品質、生産性、効率、所有権の向上、心の低下、生産の経済的指標の改善に基づいて行うことができます。
自動化のクリーニングのための金属加工ツールの部品の機械的処理中の余分な時間をスピードアップするために、金属加工の取り付け、固定、処理の知識、ツールゾーンの変更と交換、上部の部品の制御などの操作トランスポート表示バースタットなど。 cichtsіleyのより広いストレージの場合 技術システム油圧および空気圧ドライブを知っています。
Gidroprividは頑丈な部品の小さなエネルギーであり、彼の寺院を保護し、迅速な逆転とgalmuvativikonavchyアタッチメントを可能にします。 Gidroprividは、重量と全体の寸法が3〜10倍軽く、電気駆動が低くなっています。 舵への流動性を無限に調整するのは安全です。それは圧倒的で、別館のデザインです。したがって、圧倒されたときに安全に切り離すことができます。シンプルで必要です。 Gidroprividを使用すると、サイクルの自動化を簡単に監視できます。 HydrodvigunsのKKDは、電気機械よりも少ない85〜95%の境界に位置しています。
CNCを備えたバースタットでは、油圧ドライブは、フィードの手で最も頻繁にステッチするために、そして運転するとき、キルティングのために使用されます。 ヘッドローチのランチュガでは、回転式ローチでヘッドランクのヴェルスタタに悪臭が停滞します。 CNCを備えたバースタットでは、油圧駆動寿命の2つの回路が停滞する可能性があります。ボリューム(生産性が調整された油圧ポンプから)とスロットル(スプールの助けを借りて)です。 CNCからのバースタットでフィード値を調整する範囲は、ワークフィードとクイックチェンジの両方をオーバーライドすることで有罪となります。 syagaє10000mm/ hvとvishcheに勝ちます。 小さな加工送り(1〜4mm /分)での変化の高精度と滑らかさを確保する必要があります。 keruvannyaドライブフィードのシステムからの落下は、離散的(短い)で実行されます。 rozimkneniの場合、与えることの短いリードは停滞しています( ベルが鳴っている)制御システム。 小型ドライブには、低圧(ケルユチ)で動力モーターである短い電気モーター(SD)があります。 低圧SDのドライブでは、トルクを回転させ、油圧を締める必要があります。 油圧モーターと同じトルクで、クロコダイルモーターのトルクを最大300回まで変更できます。
ベルスタからの削りくずを視覚化するには、さまざまな種類の別館のバイコリストの組み合わせを呼び出します。 したがって、たとえば、革のベルスタットからの削りくずは、強力な冷却剤の流れで波打って、zbirkaに崩壊するzagalnyzholobの近くに来ます。 店舗では、クーラントが削りくずから排出され、ベルスタにポンプで送られます。 削りくずの収集のために、圧力、ウェットおよびウェットおよびウェットシステムで使用される空気圧アタッチメントを固定することも可能です。
6.Koshtipneumoautomatics。 Strumenevシステムとニューモオートマティックス。
業界でのパワー空気圧アタッチメントの順序は、空気圧自動化のアタッチメントでますます頻繁になっています。 悪臭は車の前、空気圧システムの力なしで入ることができる倉庫の前、そして若い種のエネルギーの停滞で停滞しています。
工場のフレーミングからの制御の空気圧システムを活気づけるために、vicoristovuyuyuyuyutの3つのピボットバイスは圧縮された土語です:
ハイバイス(4-10 kgf / cm2);
ミドルバイス(1-4 kgf / cm2);
低い副(最大1 kgf / cm 2)-。 空気圧オートマチックの付属品により、3つのグループに分けることができます。
7論理計算要素(プロセッサ)
信号の情報要素の論理処理には、たとえばリレー要素を使用します。
論理「I」-要素、
論理* ABO *要素

空気圧プロセッサの将来の開発は、まあ、情報処理に行き、1つの6番目から結合するモジュラーシステムの扉を通り抜けます 論理要素インストールの価格変更 
8.. カントリーハウス流体歯車について
水力トランスミッション? rіdiniの追加の流れのために機械的エネルギーの伝達を調整します。 油圧トランスミッション倉庫の前には、ポンプ、油圧モーター、および作業ラインを備えた完全なパイプラインがあります。 動的油圧機械に使用できる油圧トランスミッションは、流体力学と呼ばれます。
流体力学的ギアでは、油圧モーター、ショベルタービンなどのショベルポンプがロックされます。 ショベルポンプと水車の実際の設計では、境界に近く、建物の裏側で個別に拡張できます。 それで、2台の油圧機械が外部ハウジングを取り付けているので、ポンプはポンプホイールとタービンによって少しずつ動かされますか? タービンホイール。 船外パイプラインのそのような設計では、ポンプホイールからタービンホイールのブレードまで、そしてタービンからのラインがありますか? インペラーブレードを知っています。
機械で停滞している流体力学的伝達は、油圧カップリング(油圧カップリング)と油圧変圧器(油圧変圧器)に接続されています。
ポンプとタービンの車輪から蓄えられる油圧カップリングは、モーメントを変えずにエネルギーを伝達し、それを回転させるので、油圧カップリングの入力シャフトと出力シャフトのモーメントは実質的に同じです。
ハイドロトランスフォーマー、ポンプとタービンホイールを除いて、もう1つのホイールが必要です。 ロボットにはたくさんのモードがあります、tobto。 є非アクティブ(反応性)であり、それはリアクターとして受け入れられます。 原子炉のハイドロトランスを倉庫に向けてオンにし、伝達されるトルクを変更(変換)できるようにします。 そのようなランク、ロボット工学のより高いモードでの油圧変圧器の入力および出力シャフトでのモーメント。
複雑な名前は油圧変圧器であり、油圧変圧器としての伝送出力にさまざまな変化があり、高い伝送値では、油圧カップリングモードと油圧カップリングに切り替わります。 Tseを使用すると、スッタはコリアンダーの効率を調整できます。
空気圧アクチュエータ用電源 空気圧ドライブは、経済の組織(通信速度はほんの一瞬です)、設計の単純さ、ケルバニヤの軽さと単純さ、ロボットの信頼性と安定性に執着している人々の存在下で広く使用されています。 Vodnochaspnevmoprivіdmaєnadolіki-ストックのスムーズな移動ではなく、vidpratsovanogopovitryaを出すときのノイズの低いスクイーズ。
空気圧ドライブには、次の部品が含まれています。圧縮された風のグリップ-製造現場または工場のコンプレッサーの設置。 パワーユニット-空気圧モーター。圧縮されたツイストのエネルギーをロッドのWに変換します。 空気圧機器-制御可能なアタッチメント、rozpodilny、zapobizhniアタッチメント; 振り向く。
空気圧モーターは、アタッチメント付きの1つのデザインに配置されています。 ガイドとアタッチメントの助けを借りて、アタッチメントの姿勢を調整するためにアタッチします。
空気圧の水差しが吹く 3種類-ピストン(空気圧シリンダー、図2.59、a)、ダイアフラム(空気圧チャンバー、図2.59、b)およびベローズ(図2.59、c)。
小さい。 2.59。 空気圧モーターの種類
空気圧チャンバーは、2つのリチウムカップまたは刻印されたカップで設計されており、その間にスプリングダイアフラムがスチールまたはゴム引き布から押し出されています。 ベローズdvigunの作動空は、薄いシートの耐食鋼、真ちゅう、またはリン青銅で作られた波形の密閉チャンバー1であり、圧縮巻線の前にロッド2の作動ストロークの方向にばね方向に膨張します。 Zvorotnyは、チャンバー3の中央で回転するときに、zdіysnyuєtsyaを隠しました。良い。 ピストンとロッドの隙間にある作動中の空の部品を密閉するための空気圧シリンダー(このサービスの期間は1万サイクル変更されません)、作動中のダイアフラムは最大60万回です。 サイクル。 ベローズは必要ありません。
空気圧モーターの適応型建設要素による改善є。 悪臭は、ピストンとシリンダーの間、ロッドとシリンダーの間のリングクリアランス、および不安定なものでは、そのすべてのビットに必要です。 最新の空気圧モーターには、2つのタイプのギャップがあります(図2.59、a):1-ピストンとロッドのGOST 6969-54に準拠した、オイルベースの湿気からのVのようなオーバーフローのカフ、2-ピストンリングz'єdnan 。
さらに、管状ダイアフラムを備えた元の大規模なアタッチメントは停滞しています。 チューブはプラグで閉じられ、圧縮されたツイストを供給するためにフィッティングがプラグの1つにねじ込まれます。 圧搾ねじれが認められると、ダイヤフラム3(図2.60 a)が膨張し、ばね2の圧搾とプランジャー1の交換により、締め付け部品が膨張します。 解放の時間の前に、プランジャーはスプリングの外側の位置で回転します。
空気圧ドライブ
Vіdminnuyu米vyrobnitstvaは、バックボーン産業のコンポーネントの設計の機能的特性のための同じタイプのハイテクを所有する幅広い分布です。 そもそも、そのようなコンポーネントは、システムを駆動および駆動するために使用されます。
このシステムは、部門間オブジェクトのsukupn_stと呼ばれ、1つの方法と機能のzalnyアルゴリズムによって相互接続されています。 Yakshob'єktamiє 技術付属書、追加の日のために行く方法のモダリティと組み合わせて、または多分、これらのシステムは、油圧および空気圧、または高速油圧および空気圧システムと呼ばれます。 リディン、彼らの中で勝利する方法、そして私はそれを働く中産階級とは呼びません (energonosієm).
油圧空気圧システムの機能指定の機能として、それは制御システムに向けられています-小型機械を備えたケロバンに使用されるシステム、そのシステム(暖房システム、暖房システム、暖房システム)P。)。
倉庫の前にある制御システムは、別棟の複合施設を含み、ドライブを呼び出すために使用されます。 悪意のある電源から定期的に、電気、油圧、空気圧ドライブの開発に使用されます。
そのchiіnshiyドライブの停滞の領域は、それらの皮膚を支配するperevagと欠点の分析として開始する必要があります(表1)。
タブ。 1.バイカリストエネルギーのタイプに合わせたドライブの調整
| 基準 | 電気駆動装置 | 油圧ドライブ | 空気圧アクチュエータ |
| エネルギー供給に関するVitrati | 低1 | ヴィソキ3 ... 5 | ヴィソキ7 ... 10 |
| エネルギー伝達 | 300 km / sまでの互換性のない速度の場合 | 最大100mのスタンドで、速度-最大6 m / s、信号伝送-最大100 m / s | 1000 mまでの道路、40 m / sまでの速度、40 m / sまでの信号伝送 |
| エネルギー蓄積 | 複雑 | インターレース | 行くのは簡単 |
| 線形変化 | 難しい、高価な、小さなズシラ | 簡単に言えば、素晴らしいズシラ、パフォーマンスのより良い規制 | ただ、少額で、将来の滞在のスピードです |
| オーバータルロック | ただ、引っ張っている間 | 単純に、高いモーメント、ねじれ、周波数なし | 単純に、それほど高いモーメント、ツイスト、テンポ周波数ではありません |
| 力学への訪問者の仕事 | 特定の心にとどまる | 最大0.5m / s | 1.5 m / s ta vishche |
| ズシラ | グレートズシラ、許可されていません | 最大3000kNのZusilla、再配線から盗まれた | 最大30kNのZusilla、巻き戻しから盗まれた |
| 測位精度 | 粘性のある+1μm | 最大+1ミクロン | 0.1mmまで |
| 硬度 | ビソカ | ビソカ | ニズカ(povitrasiskaєmo) |
| ヴィトク | Ні | zabrudnennyaを構築する | Nemaєshkodi、okrіmVratenergії |
| ダウキルインジェクション | 温度変化に鈍感 | 温度変化に敏感で安全ではありません | 低温にほとんど影響を受けず、振動がありません |
そのvologonebezpechnihの心をpozhezho-、 - yakihにおける空気圧アクチュエータのObladnannya、robochem seredovischemはvibuho、アグレッシブseredovischahにstisnenepovіtrya、harakterizuєtsya単純konstruktsії、legkіstyuobslugovuvannyaそのekspluatatsії、ビソコshvidkodієyu、nadіynіstyuIdovgovіchnіstyuロボットfunktsіonalnoyugnuchkіstyu、nevisokoyuvartіstyuとtakozhmozhlivіstyuロボットを提供します。 積み上げて運ぶのは簡単ではありませんが、その一方で、ギャップを乗り越えたいのですが、中産階級や製品に問題を引き起こしたくありません。これは、食品、香水、医療および電子製品。
空気圧ドライブの電気ドライブから、メカニズムを再開発することなく、より大きな努力で線形および回転ロッドを作成する可能性があり、その時点での再居住を保証します。 同じ通信速度で、最大は産業用空気圧モーター、メンシャに存在する空気圧操作メカニズムの力です。
油圧ドライブの場合、空気圧ドライブを使用して、日中、ターニングラインとコミュニティで、タイトネスへの下位ランナーで、タイトネスで集中ダッシュボードを開くことができます 空気圧ドライブは、制御の単純さ、設置の振動の自由、ミッドレンジの温度変化に対する感度の低さを特徴としています。
同時に、空気圧ドライブは、ストレージの領域を囲むには不十分です。 たとえば、接続では、集中空気圧ラインのツイストのグリップは0.4〜1.0 MPa(4〜10バール)であり、油圧システムのグリップの下部は最大60 MPa(600バール)で、空気圧-大幅に少ないエネルギーと高い重量とサイズのインジケーターを駆動します。 その結果、ターンのタイトさは技術的に折り畳み可能になり、設置時のvikonavchメカニズムのすぐに使えるレーンのシフトのスムーズさと、中間位置での正確なタイミングを確保します。 (ポジション)与えられたルーチの法則のその実施。
空気圧システムの静かな要素の重要性を理解するために、このプロセスの原則と、導入されたdeyakyの一般の理解についてのバックエンド構造でのコミュニケーションを参照してください。
どうやら、技術プロセス全体は次のように分けることができます。
technologіchnі-vyrobnitstvoと材料の処理;
エネルギッシュ-viroblennya、その転送を再考 新種エネルギー;
іnformatsіynі-情報ストリームの形成、受信、処理、保存、および転送。
空気圧グリップは、まるで恥ずかしがり屋のように、相互接続された2つの主要部分で構成されていると言えます。
エネルギッシュなプロセスが機能するサイロビー。
情報処理を実現するケルユチョイ
ドライブの要素は、それらの機能機能が存在する場合、サブシステムの古い要素に依存します。 たとえば、アタッチメント、vyrobnitstvaの除去方法、および準備用の圧搾咀嚼(コンプレッサー、フィルター、アタッチメントの排出、レシーバーが使用される前)は、ドライブシステムにドライブを提供せずにエネルギーを蓄えます。
バイスやビトレートなどのパラメータを制御する圧縮フロントガラスのエネルギーを制御すること、および圧縮フロントガラスの直接の流れを制御することは、バルブを静かに調整するのに役立ちます
ロボットのコロナ-vikonannyavikonannyarobochivnykhシフトまたは機械、verstatsおよび技術設備のvykonannyazusil-vikonannyavikonavchyメカニズム (肺炎シリンダー、空気圧モーター、浸水も)
最も単純なドライブでは、制御機能は人々に失われます
空気圧回路の原理である単収縮は、(構造回路として)垂直になります。 パワーユニットの図のエネルギーの流れ(圧縮された風の流れ)に直接、ドライブは下から上に取られます。
管理機能と制御の作成は、多くの論理演算と数値演算の必要性に依存しています。 相互接続のシステムとしての人々の生理学的可能性の振動、新しい高性能設備のより効率的な生産は、制御機能を機械に移すときにそれほど重要ではないかもしれません。 そのようなランク、zavdannyam 自動keruvannyaєzd_jsnennyaは、人々の平凡な参加なしに管理のプロセスに。
rozіmknenіと閉鎖系および自動制御(ACS)を停滞させます。 オープンシステムでは、鍛造物のミルの制御が行われ、ケルユシー注入は、ケロベートされた物体の制御と力から形成されます。 閉じた自走砲では、ミルをインラインで、または制御点で制御オブジェクトを調整した結果に基づいて、臨界噴射が振動します。).
別館、ケルユチャ部に入る前 閉鎖系管理は、その機能特性のために、2つのpidシステムに分けられます。
情報(感覚);
論理数値(プロセッサ).
情報サポートシステムには、センサーやインジケーターだけでなく、新しい信号の入力に対するさまざまな追加機能が含まれています。
論理計算pidsystemの割り当ては、指定されたプログラムに従ってキー信号の入力を処理し、ドライブの電源部分のエネルギー制御のアタッチメントにそれらを転送することです。
パワーユニットをドライブに折りたたむことができるステップは安全であるため、重要な部分は空気圧、電気、または電子自動化の私道を経由して実現できるため、常に悪用の心の問題です。
運転機械の多くのvykonavchyメカニズムでは、制御システムとのタフな異常に映画的な接続があり、これにより、出て行く着陸船のキャンプのためのオビクタの最新の工場を判断することができます。
自動ケルバニーシステムでは、信号は 閉ループ..。 同時に、ACSの誘導の基本原理が実装されています。たとえば、リンギングリングのポールなど、制御オブジェクトの変更に関する情報(たとえば、訪問者のメカニズムに関する情報)の転送を防止します。機械)制御システムに。
ACS、schoはそのようなスキームに取り組み、分類します:制御のタイプ、定式化の性質、送信信号のタイプなど。 このようなシステムでは、プログラムは、ケロバンシステムに到達する信号によってのみフローラインから攻撃に移行します。
空気圧ドライブの空気圧部分が実装されている限り、空気圧要素ベースではそうではありません。次に、ハイブリッドACSについて説明します。 したがって、Viconanの制御システムが電気リレー接点アタッチメントに基づいている場合、または制御機能が産業用コントローラーによって操作されている場合は、電気空気圧制御システムについて話します。
したがって、電子制御システムは、再プログラミングの幅、寸法、および単純さのために空気圧システムとして視覚的に表示され、情報は、追加の電子プロセッサ、次に追加の電子プロセッサのために手動でトランスクリプトの形式で収集されます。
2.空気圧システムの機能の物理的基礎
すべての要素、アタッチメント、空気圧自動化システムで、作業中の中間はほとんどの場合コンプレッサーの前にあり、コンプレッサーに詰まっていない(特別な場合には、ガスに詰まっている)ので、しわくちゃから私たちを排出します生活。 これはガスの合計であり、窒素N2(78.08%)と酸O2(20.95%)の2つのガスの主貯蔵庫に貯蔵されます。 内部ガス(アルゴンAr、ネオンNe、ヘリウムHe、クリプトンKg、キセノンXe)の存在下で少量、その水H2(0.94%)、および二酸化炭素(二酸化炭素)CO2(0.03%)。 Krim tsikh gaziv、幸いなことに、水の賭けの量のために迫害されていないdeyakに復讐する(vologues).
vikorystannіenergії圧縮咀嚼の空気圧要素runtutsyaのロボット、およびこのrusіに見られる物理的効果。 法、プロセスを説明する方法、ガスの力学の過程で詳細に教えられるべき。
2.1基本的なガスパラメータ
副。 ピストンなどの基本的な要素を介してボリュームのあらゆる種類の閉鎖にズシラが注がれるとすぐに、すべての場合に、すべての表面で2.1に等しい内部バイスが表示されます。 これはパスカルの法則によるものです。ライン(ガス)の表面に固定されるグリップは、ライン(ガス)のすべてのポイントに伝達され、同じラインのすべてのラインに沿って伝達されます。
小さい。 2.1。 パスカルの法則のイラスト
内部バイスの値はボリュームの形ではありませんが、それは再び借りられますが、それはピストンの横方向の後退の領域にある外力のサブモジュールの結果です:
P = F / S
国際システムでは、N /m²のバイスに単一のSI単位があります。 Qiaodinitsyaパスカルと呼びます。つまりPaです。
副は、異なるіnuyuchihユニット(div。DodatokI.2)のvimіryuvatisyaである可能性があります。 ただし、実際には、パスカル[Pa]の測定単位として使用されたほか、キロパスカル[kPa]、メガパスカル[MPa]などの失われたものも使用されていました。 ヤクvinyatokvikoristoyutバー[バー]:
1バー= 105 Pa = 102 kPa = 0.1MPa。
新しい、そして地球の表面にあるオブジェクトの大気グリップのグリップ私は大気グリップと呼び、意味します Rathm..。 大気の皮膚のポイントで、大気の大気グリップは、横になるのに十分であるかのように見え始めます。 この値の値が変更されます。 大気のグリップは、荒野で天候の心から変化する可能性があります 地理的位置 m_scevost_;
空気圧システムには万力があり、原則として、圧迫しないでください、絶対に万力です Pa6cスパイクで私は大気の悪徳を開発します。 見やすくするために、テクニックのグリップは余分なグリップのグリップに忍び寄ることです。
オーバーザトップグリップ Rizb絶対バイスのnazyvayutperevischennya値と大気バイスの値。 不完全な絶対バイスは、真空メートルバイスまたは単に真空Pvakと呼ばれます(図2.2)。
小さい。 2.2。 Systemivіdlіkuサイズバイス

圧力計と呼ばれるvim_ryuvannyaの余分な万力を適用します。 圧力計スケールのゼロ点については、大気圧バイスを取ります。
真空を維持するために真空を調整するために、スケールは0から-1バールまで段階的に変化します。 真空技術により、圧力a6s〜10〜10 Pa(10 "5 bar)のサイズを小さくすることができます。 アタッチすると、vim_ryuvatiとバキューム、およびmanovacuumメーターと呼ばれる過剰なバイスが許可されます。 同じ圧力計を使用して絶対的な悪徳を取得するか、特別な場合にそれを停止します。 理論上のrozrahunksでは、絶対的な悪の価値を得ることができます。
温度。 温度を変更するには、スケールを変更します(div。SupplementI.2)が、デンマークの時間では、熱力学的にも国際的にも実用的で、ケルビン(K)と摂氏で卒業したのはそのうちの2つだけです。 ( °C)。
International Practical Scaleは、1.013の悪徳での水の凍結と沸騰の温度(いわゆる基準点)に応じて、0と100°Cになります。 105 Pa(1.013バール)。
すべての熱力学的およびガス力学的堆積物の熱力学的温度Gは、理論値でもある絶対零度に等しく、このようなガスでは弾力性はありませんが、その体積はゼロになります。
これは熱力学的です。絶対温度はG [K]であり、国際実用スケールt [°C]に従った温度は子供T = t +273.15に関連付けられています。
シルニスト。 ガスを特徴付けるもう1つの重要なパラメータは、єgustinap [kg /m³]です。これは、ローンの重みであるFの量に対する発話の重みt [kg]です。
P = m / V
Pitomyobsyag。 ピトミウムの体積v [m³/ kg] -tse値、gustiniに変換:v = 1 /ρ。
2.2ガスの基本的な物理的力
剛性。 ガスの力はobsyagによって変更され、副はstislivistと呼ばれます。 グリットは大きなグリップβによって特徴付けられます。これはボリュームの明らかなグリップであり、1つのグリップに当てはまります。
サイン 情報交換の公式では「マイナス」ですが、交換Vの負の増加(変化)のグリップを正に増加(増加)させます。
温度膨張。 温度膨張は、体積膨張係数βt[K1]によって特徴付けられます。これは、温度が1K変化すると急速に変化します。
粘度。 ガスの力とガスの気圧(ガス)の修復は粘性と呼ばれます。 粘度-パワーは歪度(rіdiniまたはガスの粒子の崩壊の程度)とは反対です:より粘性のあるrіdinimensh流体はnavpakiです。 粘度は、動粘度jiと動粘度vの係数で特徴付けることができます。
動的粘度βの効率、または内部おろし金の効率の変動の単位、єパスカル秒[Pa-s]。 Vikoristovutsyaも1つのvimirpoise [P]システムと1つのSGS:1 P = 0.1Pa-s。 mを提供する動粘度vの単位? zasosovatも1ユニットのSGSドレイン[St]:1 St = 1 s m2 / s =1SІm2/ s。
温度に関する蓄積の粘度(図2.3)、およびより古くより多くのガスの休閑の形成の性質:
小さい。 2.3。 温度による動粘度vの程度
![]()
2.3。 基本的なガス法
ガスミルは、絶対グリップ、絶対温度、ギャップの3つの主要なパラメーターによって特徴付けられます(私たちはあなたを看護します)。 ガスのVzaєmozvyazokqikhパワー私はrіvnyannyamスタンと呼びます。 理想と呼ばれるガソリンスタンドは、クラペイロン-メンデレフの農民によって説明されています。
P = pRT、
De R-絶対副、N /m²;
p-厚さ、kg / m?;
R-ガスピトーマは、J /(kg-K);になりました。 zvitrya R = 287 J /(kg-Do); T-絶対温度、To。
理想気体は、外力または分子との相互作用が関与する気体です。 マテリアルポイント、負債を逃さないように。 理想的なガスではないにしても、大規模なガスプロセスには重要ではありませんが、悪意を持って通過しますが、20 MPa(200バール)を超えない場合、価格はあまりにも公正です。
与えられた式に、質量と体積を通して習熟度を表す式を導入すると、比率として認識されます。これは、体積Vの理想気体におけるmキログラムのミルをどのように表すかです。
mR = pV / T
言及することは重要ではありませんが、恒久的なガスの質量の場合、値は変わりません(一定):
pV / T = const
主なガス法則は次のとおりです。ボイル-マリオット、チャールズ、ゲイ-リュサック。
ボイルの法則-マリオット。ガスの絶対温度が圧倒的になると、初めてガスの絶対グリップは、与えられたガスの質量の定数の値と同じになります。 言い換えれば、ガスのグリップは比例して包まれます(図2.4)。
小さい。 2.4。 ボイル-マリオットの法則の図。

温度を超えて実行されるガスプロセスは、等温と呼ばれます。 ガスが外部の熱交換器から搾り出されるときのヤクシュチョ dovkillam、その場合、そのようなプロセスは断熱(断熱)と呼ばれます。 新しい人にとっては、ポアソンの同等
p V = const、
de do-kofitsin Poisson、またはkofitsin(インジケーター)adiabati(-1.4までの飲み物の場合)。
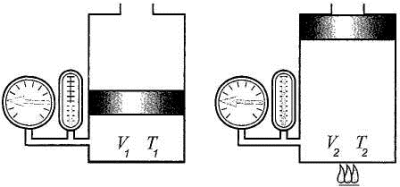
シャルルの法則..。 ガス流の閉鎖が永続的である場合、その絶対温度に対するガスの絶対圧力も永続的です。 言い換えれば、ガスのグリップは温度に正比例します。
たとえば、閉鎖系でガスを加熱するとバイスが成長し、冷えるとガスが落下します(図2.5)。
小さい。 2.5。 シャルルの法則を説明する

通信後に発生するガスプロセスは、等積(等積)と呼ばれます。).
ゲイリュサックの法則。ガスの絶対グリップが永続的になると、絶対温度までガスに与えられるガスの量も永続的になります。 言い換えれば、交換は温度に正比例します。
たとえば、ガスが加熱されると、一定のグリップで過負荷になり、成長し、冷えると変化します(図2.6)。
p = const V1 / T1 = V2 / T2
小さい。 2.6。 ゲイ・リュサックの法則を説明する
恒久的な副で実行されるガスプロセスは、等圧(等圧)と呼ばれます)*.
相互接続され、広範囲の値で変化する可能性のあるガスのパラメータの振動は、他の人の助けを借りて、新しい心に見られるガスの数を、いわゆる通常の心にもたらすことができます。
これらは、好評を博している通常の心のパラメーターです。
物理的な通常の洗浄:副1,013.105 Pa(1.013 bar)、温度273.15 K(0°C);
技術的な通常の洗浄:副1,013.105 Pa(1.013 bar)、温度293.15 K(20°C)。
2.4。 ガス余剰
ガス、ヤクのグリップ、温度、ガスチン、ささいなオブシャグの次のパラメータを調べました。 ガスの流れは、もう1つのパラメータである硝子体によって特徴付けられます。
2.4.1。 ビトラタ
Vitrataは、masi(masovic vitrata)またはobsyag(vitratのボリューム)によって配置されることを意味する値であり、直接の流れに垂直なペレレスを介して、約1時間まで何度も何度も変化します。変わるだろう。
技術文献では、vitratiはラテン文字Q(またはQv)として知られています。 ジェネリックビトラタを開始するには
Q = V / t
de Q-硝子体体積、m 3 / s; V-obsyag、m 3; t-時間、s。
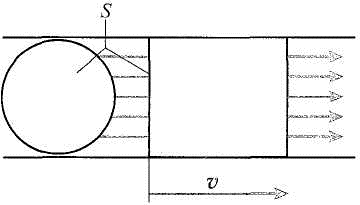
パイプラインなどによるガス漏れがある場合、硝子体のボリュームは、パイプへのガスの流れが途絶えた後、パイプの中央で横方向に切断する追加の領域として想像することもできます(図2.7 )::
Q = vS、
de v-オーバーラン流量の平均、m / s;
Sはパイプラインの断面積m2です。
小さい。 2.7。 Ob'єmnavitrata
Qm [kg / s]を大量から毎日大量に硝化して、[kg /m³]ガスの割合で蓄積し、一定期間から開始します。
Qm = pvS
言及することは重要ではありませんが、そのような預金があるので、それらの巨大な硝子体で覆うことも重要です:
Q = Qm / p
zagalny vipadkuガスでは、ネクタイでヤクを見ることが許可されているので、絞ってください。 ガスが真ん中で絞られているという事実と、このラスの間に摩擦の力が現れ、減速することを意味するという事実を1時間垣間見ることができます。 それは、実際には、ガス中のプロセスの理想化の前に、bagatio vipadkah vdayutsyaで、しかし、大きな失敗にまったくprisvodachyではなく、rozrahunkiを許します。
インテリジェンスは、ガスがオフにされたときに発生するプロセスの本質であり、不安定な不整合(理想的)と見なすことができます。
スピーチを控える法則に従ったVyhodyachya、および発生した非圧縮性流れ*の流れに対する感受性(鮮やかさの欠如)についても、生き残ることができます。 (米、2.8)。小さい。 2.8。 変更のためにパイプを横断するときのVitrataridini

価格は無関心で表されます
Q 1 = S 1 v 1 = S 2 v 2 = Q 2 = const。
うわー、vuzka perereziトランペットとより速く取得しようとします:
v 2 = v 1 S 1 / S 2
2.4.2。 Rivnyannyaベルヌーイ
流れのより低いポイントでのvimіryuvanグリップの結果、横方向の後退の波状の領域からパイプに沿ってどのように崩壊するか(図2.9)、一見逆説的かもしれません:vuzkomグリップは小さいです、低いほど広い。 これの理由は何ですか?
小さい。 2.9。 変化のパイプを通る線を越える
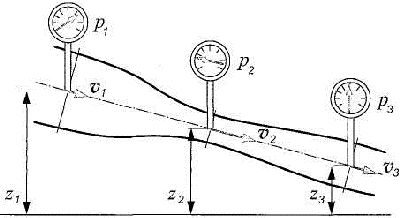
子供の力学的エネルギーは、崩壊する3つの形態があります:位置のエネルギー、副のエネルギー、および運動エネルギー。 理想的な起源が破壊される過程で、ある形のエネルギーが一つに変換され、子供のエネルギーであるピトマの抗議が見えなくなります。 数学的には、価格はベルヌーイによって記述される必要があります
gz 1 + p 1 / p + v 1 2/2 = gz 2 + p 2 / p + v 2 2/2 = gz 3 + p 3 / p + v 3 2/2
de gz-ピトマエネルギー位置(g-9.8 m / s 2-加速された生命力の低下); p-ピトマエネルギーバイス; v2 / 2-ピトマは運動エネルギーです。
そのようなランクで、vuzkapererezіパイプと重厚なティムの誕生のグリップの低下は、超自然的なエネルギーの流れを加速し、また、エネルギー圧力の変化を加速させました。
多くのvipadkで、ベルヌーイの形状を手動で記録します。そのようなryvnyannyaのメンバーを使用して、万力を緩めます。
gz 1 + p 1 + v 1 2/2 = gz 2 + p 2 + v 2 2/2
depgz-vagovyグリップ;
p-油圧バイス(または単なるバイス); pv2 / 2-ダイナミックバイス。
実用的なrozrakhunksは、パイプラインの背後や橋の支柱でエネルギーを浪費する余裕がありません。 すべての実際の生命とガスは粘性である可能性があり、生命またはガスのエネルギーの流れは、そのすぐ隣で止まるまで低下します。 エネルギーを犠牲にして、官僚は始まります:横方向の崩壊とパイプラインの領域、内面の短さ、見かけの
エネルギッシュな形での実際の(粘性のある)出産の流れのためのRivnyannya Bernoulliは、mati viglyadになります:
gz 1 + p 1 / p +α1v12/2 = gz 2 + p 2 / p +α2v22/2 +gΣhn
de α-コリオリの係数
ストリーム; g Σhn-エネルギーの総廃棄物(油圧廃棄物)。
Rivnyannya Bernoulliは、しぼんだ繰り返しの流れが枯れるまで停滞します<υ, где υ — скорость звука.
2.4.3。 漏れモード
パイプを介したガスとガスの切り替えには、薄層と乱流の2つのモードがあります(図2.10)。
小さい。 2.10
乱流モード
層流モードは、リディーニまたはガスの秩序だった崩壊(ボール)によって特徴付けられ、さらに、シフトは内部のものよりも小さいです。 ルーチの速さが臨界値をデヤックに変更した場合、シャリは変更を修正し、旋風を巻き起こします。 電流は乱流になり、エネルギーを犠牲にして成長しています。
パイプラインのラインを横切るとき、平均がパイプをオーバーランし、ストリームの速度が古い臨界V Kである場合、その瞬間に層流領域から乱流モードへの遷移が加速されます。
実験として、臨界度はラインの動粘度に正比例し、内径に比例して回転します。
Vcr = kv / d
dedo-比率の係数; v-リディーニの動粘度、m²/ s; d-パイプの内径、m。
実験的には、レジームへの変更が、任意の直径のパイプを介した出生またはガスのいずれかによって中断されるという事実も確認されますが、無次元効率の歌唱値の場合、重要な要素の数は次のとおりです。
Recr = Vcrd / v
丸パイプ用ReK〜2300。
レイノルズ数は、漏れレジームを説明するのに役立ちます。
Re = Vd / v = vpd /μ
レイノルズ数の値により、パイプによる線の交差の性質に関するパターンを見つけることができます。
このようなランクでは、ストリームの速度、ラインの粘度、パイプの内径を知ることができ、単一のパスでレイノルズ数を知ることができます。また、ReKpの値でそれを作成したため、ラインの流れのモード。
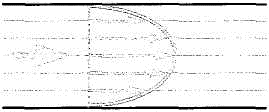
2.4.4。 開口部からのビティックガス
空気圧システムを開くときは、入口の万力から出口の開口部までの開口部を通る大規模で大量の硝子体の量を知る必要があります。 熱交換ガスがnavkolishny中間ガスと内部ガスで消費されるとすぐに、等エントロピー(断熱)で中断される可能性があります).
サンブナンの原理を取り除くためのイゾエントロピック再配置の場合のMasovavitrata:

dee-kofіtsієntvitrati開口部(ガスが終了したときにジェットを絞るvrahovuє;
実験的に開始); f-開口部までの面積。 π= p 1 / p 0、p 0-入り口の万力(pQ = constを受け入れるために呼び出します);
p1-vyhodіの万力;
k-ポアソン係数(adiabati)、最大-1.4; R-ガスピトーマは、zvitrya R = 287 J /(kg K);になりました。 T0は開封前の酒の温度です。
与えられた式が関数Qm = f(n)のグラフを示しているので、図の点線の曲線の特徴に似た図が表示されます。 2.11。
小さい。 2.11。 使用したバイスからの質量ビトラチQmの発生π= p 1 / p 0

関数Qm = f (π)臨界値π= 0.528で最大に達します。 ただし、入力のグリップの変更(値をに変更するため)は、流れが可能な限り音を圧倒します。 さらに、vyhodіの副を変更すると、mass vitratiに注がれません(図2.11の簡潔な曲線)。
値が0の場合<π<π* массовый расход подсчитывают по формуле
ガスをπで回転させるプロセス< π* называют докритическим (подкритическим ), а если отношение давле-ний π>π*次に、過臨界(超臨界)または臨界プロセスについて明示的に話します。
vitratiの量を列挙するには、masova vitrataをgustiniに持ってくる必要があります(div。Razdil2.3.1 "Ras-Khid")。 p = f(p)となるように、th入力と変更の出力でターンオーバーの値を開くことによって終了したときの振動、次にビトラティの量の値が表示されます:入力QV 0 = Q (p Qv)、入力で).
ガスを横切ることの特殊性(ばね、圧搾されたガッシュ)への攻撃に対する敬意をまとめる必要があります:横になるためのガスの万力の量(たとえば、横隔膜を横切るとき)(画面からvitra ridin)入口p0の2番目のpivnyバイスではありません(図2.12)。
小さい。 2.12。 断面積が1mmのダイヤフラムのビトレートドロップ特性 2

誘発された特性は、グリップの低下でΔp= 0.1 MPa(1 bar)、横隔膜を通過する技術的な正常な心の硝子体QHの圧縮チゼルro = 1 MPa(10 bar)の穂軸グリップが70 l / minになることを示しています、およびこの値でΔp= 0.5 MPa(5 bar)-合計50 l / hv。
電流を通すためのvikoristovuyutsyaとpristіyを見るためのpratsyuがオペレーターの最小限の参加のために最も活気を与える力を開く能力を与えるので、空気圧ドライブєdzherelエネルギー。 同様のシステムは、トラクター、バス、見晴らしの良い車の分野で広く使用されています。 デザインは、コンプレッサー、ワインディングタンク、クレーン、ホイールドライブ、ロゼットレギュレーター、怒っている労働者の裁判官から保存されます。
コンプレッサー
空気圧ドライブのTseiエレメントは、きつくひねってシステムに供給されます。 ワインはクリーナーで処理され、タンクに運ばれます。 気球からロータリーバルブへのロータリー大騒ぎの戻り。 バイスインジケーターは圧力計の後ろに表示されます。 ペダルを作動させることにより、ガルマはタップを介して回転し、それが表示されるように、亜鉛メッキされたビューで使用されます。この場合、パッドの手動グリップが使用されます。 テンションスプリングの助けを借りて、Zvorotnyプロセスv_dbuvaєtsya。
コンプレッサー設計の倉庫には、シリンダーのブロック、ヘッド、クランクケース、およびストッパーが含まれています。 メカニズムのパーツシャフトは、追加のピンとコネクティングロッドの後ろにあるピストンとともに、バッグタイプのベアリングで包まれています。 kolіnvaluの前部には、くさびのようなベルト、オイルシール、キーが装備されています。 ヤクoholodzhuvach転送ファン。 スキンワーキングエレメントの上のシリンダーブロックのヘッドには、スプリングと圧力バルブを備えたプラグがあります。 下部のコネクティングロッドヘッドには、コントロールシムが装備されています。
寒いマスティロ
空気圧亜鉛メッキドライブは、交換システムと組み合わせることができます。 オリヤはメインメインパイプからシャフトの内部に供給されます。 コネクティングロッドには減摩の欠陥があり、プリムスが取り付けられています。 バラのそよ風の方法でオイルをすすぐためのІнші要素。 クランクケースからの取り外しは、特別な接続を介してエンジンコンパートメントに向けられます。

空気圧駆動コンプレッサーの冷却システムは別のタイプです。 Vonaは同様のパワーユニットと結ばれています。 ピストンの1つが下の位置に下がると、排出が開始され、再びクリーナーと吸気バルブの新しい方法に上がります。 ピストンがピストンをピットインすると、ねじれ音が聞こえます。シリンダーのバルブを通過してメインシステムに到達するには長すぎます。 プロセス全体を繰り返しましょう。
バイスのインジケーターは、特別なレギュレーターによって相互接続されています。これにより、コンプレッサーを駆動するdvigunの努力のビトラが減少し、大学の作業リソースが増加します。 shtovchachのプランジャーとグロメットのペアを置き換えるために、レギュレーターを使用した設計はバルブで間隔を空けて配置されています。 プランジャーヨークはスプリングで押し下げられ、精製パイプラインを備えたユニットのインレットバルブの前で空になり、バイス内のコントローラーを備えたプランジャーチャネルが空になります。
亜鉛メッキシステムのドライブ
粉末バロニは、健康食品の冷蔵在庫を節約するために使用されます。 凝縮液を視覚化するため、およびアタッチメントを取り付けるためのїхデザイントランスファーバルブでは、ナットはkovpatchタイプです。
レギュレーターの本体はケーシングで閉じられ、フィッティングはバルブステムから接続されています。 スプリング機構は、私が調整するコウパックを備えたロッドに注入されます。 中央コンソールには、継ぎ目のハウジングに入口バルブと出口バルブがあります。 チャネルは、フィルターとバルーン付きの入口開口部、および排水アタッチメントを通して閉じられます。 コルクは下半身に移されます。
メインラインには、560 kN / m2未満のインジケーターを備えたグリップがあります。 プランジャーはインレットバルブにあり、コンプレッサーがシステムを修理します。

システムマネジメント
keruvannya用の油圧空気圧アクチュエータにはクレーンが装備されています。 Vinを使用すると、作業室への圧縮食品の供給を調整できます。 また、彼の助けのために、彼はブレーキングに使用できる安定したガルバニックパワーを持っています。
全体の本体はフレームに固定されています。 ダイヤフラムはゴム引きの生地素材で作られ、フレームとスケルトンに置き換えられています。 中央にある排出バルブのシートは、コントロールスプリングのボトルに向かってらせん状になっています。 空きスペースが稼働している間、大気はインレットバルブから排出されます。 ロータリータイプのスプリングは、ダイヤフラムとインレットバルブに安定して注入されます。 残りの要素のサドルをフィッティングでネジに押し込みます。 バルブの圧力は、亜鉛メッキされたチャンバーまで上昇してはなりません。
空気圧駆動ロボット
ボトルにスパイラルしながら、ガルマのペダルを備えたユニットの両腕の重要性。 ペダルスラストを押すと、コルゲートチャックの真ん中に挿入され、おもりが回転します。 スプリング付きのフラスコが右に移動し、ダイヤフラムが曲がり、インレットアナログが開くと、インレットバルブが閉じます。 スプリング機構とバルブを備えたダイヤフラムがvuzolを固定します。 3つのポジションに勝ちます。
最初に配置されたペダルで、ガルマが解放され、バルブのオフェンスが左端の位置になります。 インレットバルブはアクティブで、新しいバルブと雰囲気のある作業チャンバーを通して亜鉛メッキされています。
もう1つの位置は、ペダルへの圧力によって駆動され、大きくて光沢のあるダイヤフラムに変わります。 サドルがバルブをオーバーシュートし、雰囲気が上がります。 バルブの開口部は、スプリングの圧力で事前に張力がかけられています。

3番目の位置では、ペダルを予備的に踏んだ後、インレットバルブが開き、亜鉛メッキされたチャンバーに到達するために絞られ、亜鉛メッキのプロセスが開始されます。 ダイヤフラムが少しずつたるみ、スプリングが絞られます。 ダイヤフラムの強度が変化すると、ダイヤフラムは別の位置に留まり、バルブが閉じますが、恒久的にそれを活性化することはありません。
特徴
ペダルへの圧力が十分に強いときのギャルの空気圧駆動は、余分な量の食物を排除します。 Tse zumovlyuは、作業ビューの悪徳の指標を改善しました。 電流を通されると、プロセスは比例したリズミカルな順序で進みます。 バルブを通り抜けるのは難しいです。 アイドルスピードは特殊なボルトで調整されます。
ヘアスタイルのバルブのロボット空気圧アクチュエータには、複合型クレーンが取り付けられています。 ウインチは2つのセクションからなる要素で、上部はロボットアタッチメント用、下部はトラクター用です。 バルブの下部から、ステムはディスペンシングバルブのシートに接触します。 ステムの軸上で、ユニットに小さなアナログが装備されていることが重要です。

プラス
別棟のVikoristanniaは、多くのperevagに囲まれており、それ自体は次のとおりです。
- 空気圧ドライブを使用すると、コントロールペダルを少し注入するだけでパッドの圧力を調整できます。
- カジュアルな食事のためのロボット工学のアクセシビリティ、安全性、シンプルさ。
- 特別なリザーバーにかなりの量の位置エネルギーを蓄積する可能性があります。これにより、些細なことを避け、コンプレッサーが稼働を開始したときに効果的に活気を与えることができます。
- ツイストツイストのわずかな回転が許可されますが、これは圧縮されたツイストのストックによって補われることがよくあります。
- 結果として得られる地方の詳細を備えたシンプルさとパフォーマンス。
- コリアンデイの高効率。
- ロボットによる補助的な自動車設備に設計を保存する可能性。

不完全な
今、私はマイナスを付けます:
- どうやら食いしばった飲み物の特性を通して話す。
- 空気圧ドライブの修理には、追加の部品交換が必要です。
- デザインの折り畳み性と柔軟な輪郭修正の多様性の高さ。
- 大まかに油圧アナログを使用した、素晴らしいバガとラズミリ。
- コンプレッサーグリップの圧力の重要なビトラチ。
- コンデンセートの凍結時間前に大学が崩壊する可能性があります。
亜鉛メッキされた空気圧ドライブは、多くの要素に復讐するために、ズシラの寺院を防ぎます。 たとえば、KamAZでは、パーツに約25のアタッチメント、6つのレシーバー、約70メートルのパイプラインが含まれています。
最後に
単回路空気圧アクチュエータの設計は単純です。 ただし、現在のセキュリティ標準では、信頼性が低いために運用されていません。 自動車には、自律ドライブを備えたデシルコムが装備された、さまざまな等高線を持つアナログがあります。 現在のシステムには、最小回路用に2つの接続があり、システムには最大6つの回路があります。

さらに、大学の設計には、亜鉛メッキされた要素の通常のロボットの保守を目的とした無力なアタッチメントが含まれています。 また、トラクターや髪型によって運転されるキャンプを制御するのも悪臭を放ちます。 最も人気のある見晴らしの良い見晴らしは、一目でわかるシステムが装備されています。 特に話題となるのは、ロードトリップのメカニズムです。 podovzhenyベースのマシンでは、複雑な油圧-空気圧によるガルムの駆動がブロックされることがよくあります。 必要なZusillを手に入れるために、新参者はねじれることなく立ち往生しなければなりません、そして、メカニックへの転送は追加の労働年齢のために働くことです。 設計、保護、速度の効率を高めるシステムがあります。
ストーリンカ1
自動ケルバンを備えた空気圧ドライブの図を図1に示します。
空気圧アクチュエータの図の要素は、ニーズに応じて異なる場合があります。virobnikプラントによって保証され、信頼性と設置の容易さ。 したがって、たとえば、katalozіのvirobіv実験プラントKalіnіngradskogoの場合、リレーRUP-1106サイクルのspratsovannyaのサイクルの値が保証されます。
空気圧アクチュエータの回路では、zvnіshnіmまたは内部ガルバニックアタッチメントが、図に示すように、別のバルブ(PC)を追加します。 9.1b一点鎖線。 galm_vnogoアタッチメントのスロットルは、不況の終わりに近い位置を設定します。 これには、メインの亜鉛メッキされた別館(旋回チャネルがステムのカフまたは亜鉛メッキされたスプールで閉じられている場合)について書かれています。空の場合、閉じているように見え、グリップが急速に大きくなります。 外側のバルブを調整できるようになり次第、バルブのパラメータが正しく振動していれば、調整のグリップに近いエッジに空のホイップのグリップを適用します。
一部の回路では、空気圧アクチュエータは動作後に空気圧信号を必要とします。 デンマークの空気圧自動化のスキームでは、ロボットとドライブモードによって開始される一連の論理操作の結果として、出力信号が鳴っています。
図では。 240ハンドハンギングの空気圧駆動の図が示されています。
カートリッジのオーバーシュート:1)鋼は緊張していて安全に操作できました。つまり、処理時間が短縮される前に、周辺のグリップを失うだけでは不十分です。 2)空気圧駆動回路のシンプルなシンプルさ(ロータリーバルブやバイスリレーは不要)。 3)スピンドルが空になるのは、空気圧ドライブに必要な余分なものであるshtovochachの推力によるものです。
タイプB64-2は1つの電磁石によって制御されます。 このようなローターを備えた空気圧駆動の図を図1に示します。 電磁石EMのスイッチを入れると、ピストン/スプール7が左端の位置になります。
油圧オートマチックではなく、高圧の幅広い要素用の空気圧オートマチックを作成します。情報を手動で入力するための柔軟な設計アタッチメント、空気圧制御バルブ、電空 追加のブロッキングデバイスを接続することが可能であり、ドライブを使用して手動および自動のケロバンを追加することもできます。 図では。 2.8は、手動および自動のリムケルバンとブロックを備えた空気圧ドライブの図を示しています。 バイスインジケーター2は、ロボットモードと空気圧ドライブのオンの切り替えについて視覚的に通知します。 自動ホイールドライブの場合、空気圧フロストロック8(/)および8(2)はドライブによってロックされます。 手動でkeruvannyaは、ボタン付きの空気圧ブリスター3(1)および3(2)を提供します。 空気圧シリンダー7の自動モードの駆動ランカの動きは、3つの空気圧トリガーバルブ6がすべてオフになるまで前進しないため、機械機構の正しい駆動位置が示されます。
Viconavchi pneumocylindri 14および15は、ホイールの亜鉛メッキメカニズムにズシルを設定しました。 ZILシリーズの車には、トラクターの空気圧シリンダーがあります-車両14є直接空気圧モーター、tobto。 絞ったチャックのラクフノクのためにズシルのギャルを手に入れるための悪臭と、泉のラクフノクのためのrazgalmovuvannya。 髪型の空気圧リンドリєリンギングアクションの空気圧モーター、tobto。 悪臭は、バネの助けを借りてズシラのギャルを、そして圧縮されたひねりの助けを借りてrozgalmovannyaを手に入れます。 亜鉛メッキされていないロシアのロードトレインの場合、作動中の空の空気圧シリンダーは大気グリップ内にあり、作動中の空圧シリンダー15はグリップ内にあります。 緊急ドライブの場合の空気圧ドライブのこのような図では、トラクターからの髪型が自動的に猿轡かませられます。
図では。 7-10ドライブに空気電気回路が示されています。これを見ることができます。 vikonavchyブロックのピストンのローターと、CVCの接点のアクチュエーターへのピストンは、ロゼットのスイッチがオンになっている位置に促されます。 メインラインMからフィルターFの近くまで、および空気圧バルブKP1とKから20〜10 Paのグリップで締め付けられていません。産業用ブロッキングスイッチの場合はランスを閉じているため、バラの操作が可能です。リレー。 精度を高めるために、電磁石EOおよびEVのランスには表示されない空気圧駆動回路のすべての接点は表示されていません。
| 空気圧駆動図。 |
空気圧および油圧ドライブの特性の変化は、スロットルアネックスを介したガスの移動の特性に関連しており、より合理的には、その温度の圧力の変化および減少によるグスティニガスの変化の変化によるものです。粘性粘度で。 ただし、多くの種類のドライブは、その特性とドライブのクラスを失う傾向があります。 油圧ドライブ用に以前に開発されたレギュレーションの剛性と品質の主な規定は、固定されており、空気圧ドライブまでです。 油圧空気圧ドライブのダイナミクスの見出しと変化は、数学モデルの開発結果の前に表示されます。 スロットル制御付き油圧駆動回路の12.1項で説明したものと同様の、高速空気圧駆動回路を備えた線形モデルと互換性があります。 p align = "justify">空気圧ドライブの図を図1に示します。 12.15。 ドライブの動的特性へのガス圧の注入をポイントブランクで示すために、空気圧シリンダーのサポートは完全に堅固です。 さらに、ガス温度は、スプールrozpodilny別館の入り口の前にあるガスラインに継続的に転送されます。 Іншіは、所定の位置に配置されたときにモデルをドライブに提供します。


