План лекції
1. Загальні відомості
2. Основні завдання автоматизації водовідливних установок
3. Промислова апаратура автоматизації водовідливу
4. Система керування насосом із перетворювачем частоти
5. Датчики та спеціальні реле автоматизації водовідливу
7.1 Загальні відомості
Насос – це пристрій, який служить для напірного переміщення (всмоктування, нагнітання) рідини внаслідок повідомлення енергії. Насос перетворює механічну енергію двигуна в енергію рідини, що переміщується, підвищуючи її тиск. За призначенням насоси класифікують такі групи:
Наша очисна установка отримує середню витрату близько 50 мільйонів галонів на день і має максимальну пропускну спроможність 220 мільйонів барелів на добу. Ми також експлуатуємо відповідну систему збору стічних водта віддалені станції для скидання стічних вод.
Здебільшого гравітація передає площу стічних вод від її витоків до нашої очисної споруди, але для глибоководних ділянок потрібні підйомні станції або насосні станції для підйому стічних вод на дрібніші труби. Ми дистанційно контролюємо кожну каналізаційну насосну станцію та підйомну станцію для забезпечення нормальної роботи. Якщо щось не вдається, ми отримуємо сигнал тривоги у нашій центральній диспетчерській на очисній установці. Інша дистанційно контрольована інформація включає стан насоса, кількість запусків та зупинок насоса та щоденний робочий годинник насоса.
комунального та промислового водопостачання;
занурювальні для подачі води або нафти зі свердловин;
циркуляційні;
живильні;
водовідливні;
для транспортування нафти та ін.
Насоси, як правило, працюють у режимах тривалого навантаження. , напрацьовуючи протягом року значну кількість годин; навантаження на валу приводного двигуна нормальне без перевантажень. Найбільш досконалим способом регулювання подачі насосів є зміна частоти обертання двигунів, діапазон регулювання якої зазвичай невеликий; широке регулювання потрібно лише окремих випадках.
Нещодавно ми встановили нові елементи керування на одній ділянці насосної станції. Ми розробили автоматичну систему аварійного перемикання цієї станції насосної станції. Ми також нещодавно переробили підрозділи дистанційної телеметрії, які працюють і контролюють наші віддалені станції з видалення стічних вод.
Модернізація блоку керування насосною станцією
Ділянка насосної станції, яку ми модернізували за допомогою автоматичної системи аварійного перемикання, складається із двох насосів із постійною швидкістю, запущених по всій лінії. Блок управління насосної станції контролює та контролює рівень води у сховищі або вологу свердловину. Контролер запускає і зупиняє насоси відповідно до рівня користувача. Він також забезпечує сигналізацію високого та низького рівня, вказує, чи знаходяться елементи керування насосом у режимі «Ручний» або «Авто», і вказує, чи реле перевантаження спрацювало.
Для приводу насосів, як і у випадку з вентиляторами, незважаючи на очевидні тенденції до більш широкого використання електроприводів, що регулюються, нагнітачів нерегульований привід залишається основним. Найбільш поширеним приводом є привід з короткозамкненим асинхронним двигуном. При потужностях понад 300 кВт поряд із короткозамкненим двигуном застосовують синхронні двигуни. Коли за умовами пуску потрібне обмеження прискорень або пускових струмів, використовуються асинхронні двигуни з фазним ротором. Регульований електропривод застосовують у тих випадках, коли за умовами роботи продуктивність нагнітача необхідно часто змінювати в широких межах, наприклад, для насосів систем водопостачання, а також коли нагнітачі потребують автоматичного регулювання продуктивності з підвищеними вимогами до якості регулювання (деякі циркуляційні та поживні насоси).
Блок керування насосної станції запрограмований на те, щоб чергувати, який насос запускається першим, щоб розподілити час роботи насоса рівномірно. Він також запрограмований на запуск другого насоса, якщо перший насос не може забезпечити достатній потік стоків, щоб підтримувати вологу свердловину у прийнятному діапазоні.
Функція стійкості до відмов дозволяє станції нормально функціонувати, поки ремонт не буде виконаний у звичайні робочі години. Для кожної функції використовується одна пара контактів. Оскільки у нас могло бути обладнання в наших руках за кілька днів після замовлення, ми змогли швидко розвинути ці системи.
Насосні агрегати часто поєднують у насосні станції, при цьому кілька насосів працює паралельно на одну мережу.
Ряд застосовуваних насосів не потребує регулювання швидкості: пожежні насоси, насоси водопровідних магістралей, переважна більшість шахтних і рудничних водовідливних установок та ін.
Схема керування засувками насосної станції
Оператор, відповідальний за моніторинг станцій, дзвонив мені багато разів увечері або у вихідні, просячи мене поглянути на сайт. Проте затримки зв'язку, які ми відчуваємо через стільниковий інтернет-зв'язок, змусили нас шукати альтернативні методи підключення.
Наш місцевий дистриб'ютор електроенергії реалізує оптико-оптичний інтернет-сервіс, який, як ми вважаємо, має ключове значення для вирішення цієї проблеми. В даний час ми оцінюємо сайти, щоб знайти хороших кандидатів для пілотного проекту, використовуючи це високошвидкісне з'єднання.
7.2 Основні завдання автоматизації водовідливних установок
Завдання, розв'язувані системами автоматизації водовідливних установок різних АТК, зазвичай, подібні або близькі за основними положеннями. У цьому показовий перелік основних завдань автоматизації процесу відкачування води з шахт та копалень.
Основними завданнями автоматизації процесу відкачування води з шахт є такі:
Модернізація системи стоїть зусиль
Новий блок управління насосної станції виявився надійнішим, ніж оригінальна система управління. У нас немає конкретних записів про те, скільки разів персонал операцій був відправлений на сайт у минулому, або скільки разів електрообладнання було потрібне після декількох годин.
Хоча ми ретельно протестували його, у нас ще не було ситуації, яка потребує використання функції автоматичного перемикання після збою. Якщо це рятує нас лише один раз, це коштувало зусиль. Апаратне забезпечення є модульним, тому нам не потрібно купувати більше, ніж потрібно. Коли ви вважаєте, що ми маємо понад 80 віддалених сайтів, економія може швидко складатися.
- Забезпечення нормального функціонування водовідливу без постійної присутності обслуговуючого персоналу;
– пуск та зупинка насосів залежно від рівня води у водозбірнику в межах регулювальної ємності;
– автоматичне керування насосними агрегатами;
- Почергова робота насосних агрегатів;
– автоматичне включеннярезервних насосних агрегатів при несправності та автоматичному відключенніпрацюючих;
У першій частині описуються цілі та змінні, які необхідно враховувати при проектуванні. Друга - теоретична основа, необхідна для розуміння дизайну. Враховуючи відстані, які відокремлюють ці насосні станції, має надаватися інтранет-зв'язок, щоб мати можливість синхронізувати роботу між станціями, і в той же час це дозволяє збільшити пропускну здатність та керування станами процесу.
Враховуючи умови географії в багатьох ситуаціях, для задоволення потреб необхідно використовувати насосні установки. Саме зараз електронні інженери можуть втрутитися, щоб оптимізувати цей процес. Конструкція, запропонована в цій роботі, застосовується до будь-якого типу насосної установки, а не тільки до питної води, але також її можна адаптувати до насосних станцій, що використовуються. Ця адаптивність обмежується лише потужністю трифазного двигуна. У конкретному випадку в галузі дослідження ця система може забезпечити суттєву економію часу та оптимізації процесу.
- Можливість застосування різних способів заливання: баковими акумуляторами; із застосуванням занурювальних насосівабо занурювальних камер; із нагнітального трубопроводу; допоміжним насосом та сифонним способом;
- Дозування заливання за часом;
– швидке перемикання з автоматичного керування на ручне.
Крім того, система автоматизації процесу відкачування води повинна забезпечувати:
Ви можете скоротити кількість годин, необхідних оператору для спостереження за процесом, насправді було б достатньо перевірити стан насосних станційв офісі охорони довкілляі мати лише оператора чи відповідального. Ви можете розраховувати на впевненість, що у баках завжди буде вода.
Відповідно до цих функцій необхідно враховувати, наскільки простою або складною може бути система, оскільки це визначається типом системи, яка повинна контролюватись, і складовими її складовими, такими як комутатор, реле та контролери часу. Контролери виконують різні функції, такі як запуск, прискорення, регулювання швидкості, регулювання потужності, захист, інверсія та зупинка. Він відомий як ручне керування, тому що оператор повинен перемістити перемикач або натиснути кнопку, щоб таким чином було виконано якусь зміну в робочих умовах машини або системи.
– місцеве (ручне) управління окремими агрегатами для налагоджувальних та ремонтних робіт;
- місцеве управління будь-яким числом насосних агрегатів без порушення роботи інших агрегатів в автоматичному режимі;
- аварійна зупинка насосів при зниженні або втраті продуктивності, перегріві підшипників, зникненні напруги в ланцюгах управління, коротких замиканнях;
На малюнку 1 показано, як працює цей тип управління, де можна бачити, що оператор знаходиться там, де знаходиться стартер, щоб керувати двигуном. Рисунок 1 Ручне керування електродвигуном. На малюнку 2 показано напівавтоматичне управління, у якому оператор розташований там, де розташовані кнопки.
Мал. 2 Напівавтоматичне керування електродвигуном. Початкове замовлення є автоматичним, але зазвичай воно виконується з ручним керуванням на панелі кнопок або перемикачів. Таким чином, якщо схема містить один або декілька автоматичних пристроїв, її слід класифікувати як автоматичне керування. Ця система керування змушує кнопки активуватись у певний момент, і схема автоматично закривається; Як тільки ланцюг закритий, він дозволяє електромагнітному стартеру розпочати свою роботу та запустити роботу двигуна.
- блокування, що виключають можливість: пуску насосного агрегату при незалитому насосі, включення моторного приводу засувки до пуску насосного агрегату, зупинки насосного агрегату до повного закриття засувки, дистанційного включення насосів за відсутності води у водозбірнику, повторного включення аварійно відключеного насоса;
Основні завдання автоматизації водовідливних установок
Малюнок 3 Автоматичне керування електродвигуном. Це розуміється програмованим логічним контролером, повномасштабним, призначеним управління у послідовних процесах реального часу, його управління та програмування можуть виконуватися персоналом з електричними чи електронними дослідженнями без знання комп'ютера. Його також можна визначити як чорну скриньку, в якій є вхідні клеми, до яких підключені кнопки, детектори та деякі вихідні клеми, до яких підключені котушки контактора, електроклапани, лампи і т.д. таким чином, робота останнього діє залежно від вхідних сигналів, які активуються в кожний момент відповідно до збереженої програми.
– контроль продуктивності насосів, перегріву підшипників та положення засувок;
– гідравлічний захист, захист від перегріву підшипників ковзання та інші види захисту;
– сигналізацію: у камері водовідливу – про аварійне відключення насосного агрегату та наявність напруги в ланцюгах управління; у центральному диспетчерському пункті шахти – про роботу насосних агрегатів (світлову), про аварійне відключення насосних агрегатів (знеособлений сигнал), аварійний рівень води у водозбірнику, несправність сигнальних ланцюгів (звуковий та світловий) та наявність напруги в ланцюгах управління.
Традиційні елементи з допоміжними реле, блокування, таймінг і т.д. є внутрішніми. Насправді, завдання користувача зводиться до виконання програми, яка встановлює взаємозв'язок між вхідними сигналами, які повинні виконуватися для того, щоб активувати кожен вихід з відповідним програмуванням.
Модифікація програм та виправлення помилок. За традиційної провідної схеми будь-яка зміна у цьому потребує багато часу, тому що для внесення цієї зміни необхідно переробити плати управління. Низька вартість Технологічний прогрес зробив ущільнення різноманітними функціями в невеликому та дешевшому обладнанні. Робоча швидкість. Традиційні реле можуть тривати багато часу. Надійність У цілому твердотільне обладнання надійніше, ніж електромеханічні реле та таймери.
Незалежно від технологічної схеми водовідливу існують загальні завданняавтоматизації водовідливних установок:
- Вивільнення обслуговуючого персоналу;
– підвищення надійності та безпеки гірничих робіт;
- Забезпечення оптимальних режимів роботи насосів за рахунок регулювання їх продуктивності.
З позицій управління та економічної ефективності процес автоматизації водовідливних установок у СРСР розвивався двома етапами:
Створіть образ записів, оскільки програма користувача не повинна звертатися безпосередньо до цих записів. Оновіть стан виходів відповідно до їх зображення, отриманого в кінці циклу виконання програми користувача. Існує два типи входів: Цифрові входи Цифрові входи.
Це перетворення виконується з певною точністю або роздільною здатністю та з кожним певним інтервалом часу. Модулі аналогового введення можуть зчитувати напругу чи струм. Існує два типи виходів: цифрові виходи. Статичні вихідні модулі при подачі напруги можуть діяти тільки на елементи, які працюють на тому самому напрузі, а модулі електромеханічного виходу, вільні від напруги, можуть впливати на елементи, що працюють при різних напругах. Ця напруга або струм можуть служити контрольним завданням для виконавчих механізмів, які приймають аналогове управління, наприклад, варіатори швидкості, ступені тиристора печі і регулятори температури.
перший етап – автоматизація процесу пуску та зупинки насосів у функції рівня води у водозбірнику;
другий етап – автоматичне керування насосом для забезпечення оптимальних режимів роботи водовідливної установки.
Економічна ефективність першого етапу автоматизації забезпечується вивільненням обслуговуючого персоналу. На другому етапі автоматизації ефективність досягається:
Аналогові сигнали проходять великий процес адаптації як у вхідних модулях, і у вихідних модулях. Блок або консоль програмування: це набір носіїв, апаратних засобів та програмного забезпечення, через які програміст вводить та уточнює послідовності інструкцій, які складають програму, що виконується. Таким чином, вони не втручаються безпосередньо у підготовку чи виконання програми.
Проконсультуйтеся з програмою відповідно до даних, що зберігаються на вхідному зображенні, та під час створення зображення виходів. Його структура підпорядковується подібності, що існує з ланцюгами управління з провідною логікою, тобто використовує одне й те саме уявлення нормально відкритих і замкнених контактів, з тією різницею, що його інтерпретація зовсім інша. На малюнку 6 показано програмування контактів.
а) спрощенням гідравлічних та електричних схем водовідливу, т.к. не потрібно заливальних систем та складних програмуючих пристроїв;
б) скороченням ємності водозбірників на 30-50%;
в) скороченням на 35-75% потужності електродвигунів та продуктивності насосів;
р) підвищенням надійності водовідливних установок, т.к. відомо, що близько 80% всіх відмов виникає у момент пуску насосів у роботу;
д) зниженням кількості модифікацій насосів за рахунок збільшення робочої зони промислового використання насосів.
У СРСР основна увага приділялася першому етапу автоматизації. Відповідно до вимог першого етапу автоматизації апаратура управління має забезпечувати три види управління: автоматичне, місцеве (у камері водовідливу) та дистанційне (від диспетчера).
Слід зазначити, що в останні роки набув популярності й інший напрямок автоматизації водовідливних насосів (найпоширеніший у далекому зарубіжжі), як зазначалося вище, заснований на використанні одного насоса з частотно-регульованим асинхронним електроприводом. І тут потужність двигуна вибирається з розрахунку максимально можливого водопритоку, тобто. з урахуванням максимально можливого навантаження на привод. Таким чином, при середніх і малих водопритоках спостерігається явне недовантаження двигуна, який однак компенсується шляхом зміни його кутової швидкості і, як наслідок, зменшенням навантаження і потужності електроприводу, що споживається.
7.3 Промислова апаратура автоматизації водовідливу
Для автоматичного керування водовідливними установками застосовується така апаратура:
АВО-3 для установок, обладнаних одним насосом із короткозамкненим асинхронним двигуном до 120 кВт;
УАВ для установок, обладнаних насосами з високовольтними та низьковольтними асинхронними короткозамкненими електродвигунами. Уніфікована апаратура УАВ має нормальне виконання та може укомплектовуватись для автоматизації насосів;
ВАВ для установок, обладнаних насосами (до дев'яти) з високовольтними та низьковольтними асинхронними короткозамкненими електродвигунами. Апаратура має вибухозахищене виконання і може використовуватися в шахтах, небезпечних за газом або пилом.
До найважливіших операцій з керування водовідливною установкою належить заливання насоса перед включенням його в роботу. В даний час найбільшого поширення набув спосіб заливання за допомогою заливного занурювального насоса ЗПН, який знаходиться у водозбірнику нижче нижнього рівня і постійно залитий водою.
На малюнку 7.1 представлено гідравлічну схему автоматичної водовідливної установки.
Малюнок 7.1. Гідравлічна схема автоматичної водовідливної установки
Тут зображено: 1 – датчики рівня; 2 - апарат управління (реле контролю рівня); 3 - виконавчий механізм засувки з електроприводом; 4 – водовідливний трубопровід із зворотним клапаном; 5 – датчик-реле тиску; 6 – датчики температури; 7 – датчик-реле продуктивності; 8 - занурювальний заливний насос.
Апаратура ВАВзабезпечує автоматичне, дистанційне та ручне управління насосними агрегатами.
В автоматичному режимі апаратура включає насосні агрегати, залежно від рівня води у водозбірнику; забезпечує включення електродвигунів насосів з витримкою часу при паралельній роботі насосних агрегатів для виключення накладання пускових струмів та гідравлічного удару; включає резервний насос при виході з ладу робітника; заливає занурювальним чи допоміжним насосом головні насоси та здійснює контроль заливання за часом, контроль роботи з продуктивності та захисту від аварійних режимів.
Розглянемо роботу схеми ВАВ у автоматичному режимі. Наведена на рис. 7.2 Важлива електрична схема автоматизації одного насоса відповідає вихідному стану.
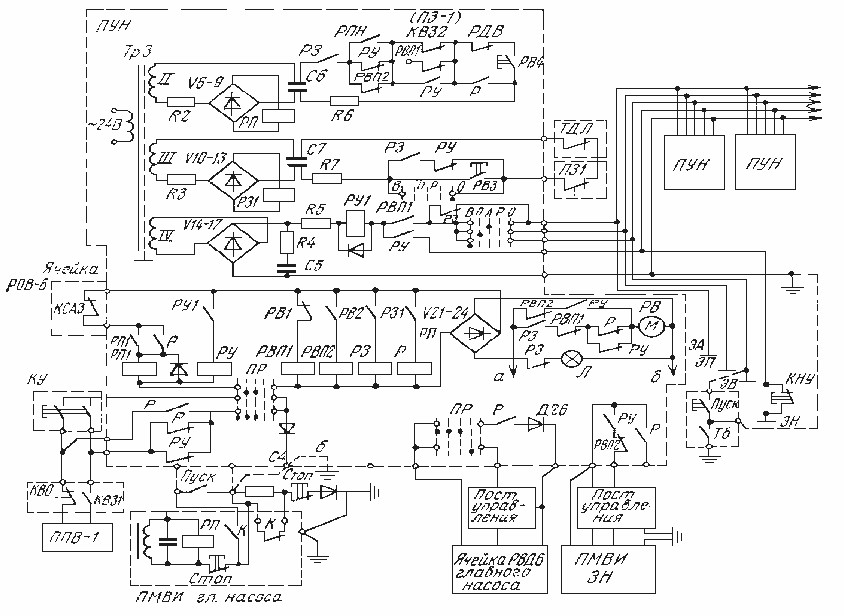
Малюнок 7.2. Принципова електрична схема апаратури ВАВ
Перемикач положення ПР встановлено у положення для роботи насоса верхнього рівня (В). при подачі напруги в блок керування в ньому спалахує сигнальна лампочка і спрацьовує реле захисту РЗ1 по ланцюгу: обмотка III трансформатора Тр3, конденсатор С7, контакт термодатчика ТДЛ, контакт кінцевого вимикача ПЗ1, перемикач режиму роботи ПР, резистор R7, конденсатор С7, діодний міст Д10 -Д13, резистор R3, обмотка III Тр3. Своїм замикаючим контактом реле Р31 включає реле захисту РЗ, яке готує до включення ланцюга включення заливного та головного насосів.
При контактуванні датчика верхнього рівня ЕВ з водою замикається ланцюг живлення проміжного реле РУ1 і спрацьовує (обмотка IV Тр3, Д14, Д17, R5, РУ1, РВП1, ПР, ЕВ, вода-земля, обмотка IV Тр3). Реле РУ1 своїм замикаючим контактом включає реле управління РУ (введення б, Д21-Д24, РУ1, РУ, ПР, введення а), яке своїм замикаючим контактом РУ та електродом ЕН шунтує контакт реле РУ1 до тих пір, поки вода у водозбірнику не опуститься нижче рівня електрода ЕН.
Реле РУ замикаючим контактом включає пускач заливного насоса (починається заливка головного насоса) і двигун М моторного реле часу здійснюється програма заливання, пуску та роботи головного насоса.
З витримкою часу замикається контакт реле РВ4 та включається реле РП (обмотка II Тр3, С6, Р3-РВП2, РУ, РДВ, РВ4, R6, С6, Д6-Д9-R2, обмотка II Тр 3), яке своїм замикаючим контактом включає реле пуску головного насоса Р. Останнє замикаючим контактом включає пускач ППВ1 приводу засувки на відкривання і комірку РВД6 (якщо високовольтний двигун) або пускач (якщо низьковольтний двигун) головного насоса.
Через 383 с (час роботи головного насоса) замикається контакт реле РВ2 і включається реле РВП2, яке розриває ланцюги живлення двигуна реле моторного РВ і реле РП. Двигун М вимикається, а реле РВП2 буде у разі шунтировано контактом реле РПН.
Після відкачування води до нижнього рівня розмикається ланцюг живлення реле РУ1, яке відключається та розриває ланцюг живлення реле РУ. Це призводить до включення пускача ППВ1 приводу засувки і вона закриється.
При закриванні засувки розмикається контакт КВЗ2 та знеструмлюється реле РП. Двигун головного насоса вимикається від мережі. Після повного закриття засувки її пускач ППВ1 відключається контактом кінцевого положення КВЗ1.
Реле РУ своїм контактом включає двигун М і моторне реле часу РВ буде повернено у вихідний стан, в якому двигун М буде відключений від ланцюга живлення контактом РВП1.
7.4 Аналіз типових алгоритмів роботи
Відповідно до типового алгоритму роботи шахтних водовідливних установок, що набув поширення в серійній апаратурі радянського виготовлення, функціонування водовідливу здійснюється наступним чином.
Після включення в роботу апаратури та її програмного пристрою контролюється рівень води у водозбірнику за допомогою електродних датчиків (логічна умова р). Коли вода піднімається до датчика верхнього рівня, надходить команда на включення насоса заливки ЗПН, який подає воду в насос протягом часу, передбаченого програмним блоком. Якість заливки контролюється реле тиску РДВ (логічна умова k). Якщо в момент контролю рівня він досяг підвищеного чи аварійного рівня ( р=0), програмний блок спочатку перемикає схему на включення nнасосів одночасно, а лише потім включає заливний насос.
Коли насос (або насоси) буде залитий, подається команда на введення його в роботу з подальшим контролем за продуктивністю за допомогою прапорця реле продуктивності РПН (логічна умова r).
Якщо насос розвинув задану продуктивність (r=1), схема перемикається на контроль нижнього рівня, при досягненні якого насос буде відключений.
Якщо насос з будь-якої причини не розвинув заданої продуктивності, він відключається і подається сигнал диспетчеру, а апаратура розпочне новий цикл включення в роботу чергового насоса.
Наведений алгоритм відображає лише порядок виконання основних функцій щодо включення та відключення насосів. Поряд із ними апаратура автоматизації забезпечує виконання різних контрольних та захисних функцій, наприклад, контроль температури підшипників за допомогою датчиків ТДЛ.
Таким чином, існуюча апаратура автоматизації шахтного водовідливу типу АТ, ВАВ, КАВ, УАВ та ін передбачає тільки двопозиційний принцип управління насосними агрегатами, що забезпечує зміну продуктивності насосних комплексів лише за рахунок зміни кількості працюючих насосів.
Подальше підвищення ефективності роботи водовідливних установок може бути досягнуто при створенні систем, що забезпечують регулювання продуктивності насосів за алгоритмом або переведення їх на безперервне відкачування води (робота на приплив).
При цьому:
Скорочується необхідна ємність водозбірників на 30-50%;
Скорочується на 35-75% потужність електродвигунів насосних агрегатів та з'являється можливість застосовувати менші за продуктивністю насоси;
Підвищується безвідмовність роботи водовідливної установки, оскільки приблизно 60% відмов виникають у момент запуску насосів;
Зменшуються витрати на водовідлив за рахунок інтенсивного відкачування води в години мінімуму енергоспоживання, коли тариф за електроенергію мінімальний.
Автоматичне регулювання продуктивності відцентрових насосів може здійснюватися шляхом зміни окружної швидкості робочого колеса та без її зміни.
Об'єкт регулювання в САУ водовідливною установкою – водозбірник, а його вихідний параметр – рівень води Н, який необхідно підтримувати постійним шляхом зміни продуктивності Q н насоса. Диференціальне рівняння такого об'єкта.

де dH/dt – швидкість зміни рівня води у водозбірнику, м/с;
Q пр - приплив води, м 3 / с;
k в = 1/F – передавальний коефіцієнт об'єкта (F – площа водозбірника, м2);
Q н – продуктивність насоса, м3/с.
Отже, об'єкт є астатичним ланка першого порядку, передатна функція якого
Насос характеризується кутовою швидкістю робочого колеса на вході та продуктивністю Q н на виході. Він може бути представлений аперіодичним ланкою першого порядку з передавальною функцією
Кутова швидкість робочого колеса насоса може бути змінена шляхом зміни частоти f напруги, що живить електродвигун насоса.
Регулювання частоти в САУ у разі здійснюється тиристорним перетворювачем частоти ТПЧ, сигнал управління який подається від блоку управління БУ. Вимірювання вихідного параметра об'єкта Н проводиться датчиком рівня дистанційного керування. Знак і рівень сигналу неузгодженості U між фактичним U ф і заданим U 3 значеннями рівнів визначає характер вихідного сигналу блоку управління БО. Сигнали U ф та U 3 відповідно пропорційні Н 3 та Н ф. Для отримання безперервного сигналу U ф використовуються індуктивні та реостатні датчики з чутливим поплавцевим елементом, а також інші типи рівнемірів.
В останні роки в гірничій промисловості також набув поширення спосіб регулювання продуктивності насоса при незмінній частоті обертання робочого колеса за рахунок впуску повітря у всмоктування. Цей спосіб відрізняється простотою і досить економічний.
Режим саморегулювання виникає внаслідок того, що тиск у точці а(Місце підведення повітряної трубки до всмоктуючого трубопроводу насоса) визначається гідростатичним тиском Р а, пропорційним рівню води у водозбірнику та втраті напору на ділянці а-b.
Якщо за певному рівні Н тиск Р а більше втрат у трубопроводі, що всмоктує, на ділянці a – b , тобто. (Р а - Р ат) 0, то повітря в насос не надходить і його продуктивність максимальна. При (Р а – Р ат) 0 повітря засмоктується в насос та його продуктивність падає.
Гідравлічна схема САУ продуктивності насоса подачею повітря у всмоктування в режимі саморегулювання наведена на малюнку 7.3,а.
Об'єктом регулювання в САУ при подачі повітря у всмокт можна вважати водозбірник (рисунок 7.3,б).

Малюнок 7.3. Гідравлічна (а) та функціональна (б) схеми САУ продуктивності насоса подача повітря на всмоктування
Диференціальне рівняння ланки «насос – трубопровід» (Н с – насос)
де Т н - Постійна часу ланки;
q – об'ємна витрата повітря.
Отже, ланка «насос – трубопровід» є періодичною ланкою першого порядку, передатна функція якої

Рівняння ланки «підвідна трубка» Т описується безінерційною, підсилювальною ланкою:
Залежно від постановки задачі при автоматичному регулюванні продуктивності насосних агрегатів можуть бути реалізовані різні алгоритми керування: підтримка постійного рівня води у водозбірнику; зміна рівня води за заданою програмою; вирівнювання навантаження на шинах шахтної підстанції
У той же час, більш сучасним є регулювання за допомогою перетворювачів частоти, які дозволяють плавно змінювати частоту обертання електродвигуна насоса і, таким чином, регулювати його продуктивність і підтримувати заданий рівень при різних водопритоках.
При малому припливі двигун насоса обертається з малою швидкістю, достатньої підтримки низького рівня води у водозбірнику (зумпфе), і витрачає мінімум енергії. При підвищенні водопритоку, що досягає певного значення, швидкість двигуна і, як наслідок, продуктивність збільшується.
7.5 Система керування насосом із перетворювачем частоти
Найбільш сучасним, як зазначалося раніше, є регулювання за допомогою перетворювачів частоти, які дозволяють плавно змінювати частоту обертання електродвигуна насоса і, таким чином, регулювати його продуктивність і підтримувати рівень у водозбірнику при різних притоках рідини, що перекачується. При малих притоках рідини двигун насоса обертається з малою швидкістю, необхідною лише для підтримки мінімального (нижнього) рівня, і витрачає мінімум енергії.
На малюнку 7.4 показано функціональну схему регулювання електродвигуна насоса з використанням перетворювача частоти FR-A500 фірми Mitsubishi Electric.
![]()
Малюнок 7.4. Функціональна схема регулювання електродвигуном насоса з використанням перетворювача частоти
На вхід системи подаються сигнал завдання та сигнал, що отримується з датчика рівня. Відхилення між реальним і заданим значеннями рівня перетворюється регулятором сигнал завдання частоти, під впливом якого перетворювач змінює частоту обертання двигуна насоса, прагнучи звести різницю між завданням і реальним значенням рівня до нуля. Таким чином, мінімальний рівень води у водозбірнику підтримується незалежно від припливу рідини.
Сучасні перетворювачі частоти дозволяють створювати системи управління будь-якої складності без додаткових апаратних засобів – програмним способом з використанням програмованого промконтролера.
У цьому випадку можливе використання алгоритму роботи САУ водовідливного насоса на основі правил нечіткої логіки.
Надіслати свою гарну роботу до бази знань просто. Використовуйте форму нижче
Студенти, аспіранти, молоді вчені, які використовують базу знань у своєму навчанні та роботі, будуть вам дуже вдячні.
Розміщено на http://www.allbest.ru/
Міністерство освіти Московської області
Державна бюджетна освітня установа
Середня професійна освіта
Московської області
"Клінський промислово-економічний технікум"
Реферат на тему:
«Автоматичне керування насосних станцій»
Виконав
студент гр. ТМ-11
І.С. Карелін
Призначення та принцип роботи насосних станцій
Насосна станція водопостачання є обов'язковою частиною системи подачі води в будинку або котеджі, якщо та отримує її з автономних джерел типу глибинних свердловин. У ряді випадків ці агрегати використовують також і при перекачуванні води з водопровідної мережіколи тиску в ній недостатньо, а також при бажанні мати її запас у накопичувальних ємностях. Насосні станції для дому та для дачі легко справляються з підйомом та подачею глибинних вод, і за потреби можуть перекачувати воду на значні відстані. Всі операції, а також контроль над ними, включаючи забезпечення безпечної роботи системи, усунення гідроударів тощо, виконуються в повністю автоматичному (або напівавтоматичному) режимі. На відміну від занурювальних систем свердловин автоматична насосна станція розміщується на поверхні. Вона є насосом, з'єднаним в моноблок з насосом реле і гідроакумулятором. Вода надходить під тиском, причому коли останнє падає до деякого порога, реле автоматично включає насос для повторення циклу. Перед тим як купити насосну станцію, найпильнішу увагу слід приділити підбору гідроакумулятора. Його обсяг пов'язаний із споживанням води і повинен бути оптимальним, тому що тільки в цьому випадку гарантується тривала надійна робота всієї системи загалом. В окрему категорію виділяються каналізаційні насосні станції, до складу яких включається спеціальна ємність для уловлювання твердих включень. Ще ефективніше застосування спеціального насоса з вбудованим ріжучим механізмом, який служить подрібнення великих частинок і волокон.
Загальні відомості. Робота насосних установок електроенергії У сучасних вітчизняних та зарубіжних системах регулювання режимів роботи насосних установок здійснюється за допомогою автоматизованого регульованого електроприводу. У таких системах регульованим параметром є тиск рідини. Сучасний розвиток техніки дозволяє підтримувати заданий натиск із великою точністю. Однак висока точність спричиняє безперервну зміну частоти обертання електродвигуна насосного агрегату і внаслідок цього сприяє виникненню знакозмінних навантажень на окремі елементи насосного агрегату (еластичні муфти, що з'єднують насос з двигуном та ін.), що ведуть до їх передчасного зносу. Тому часом доводиться встановлювати підвищену зону нечутливості системи регулювання, що знижує точність стабілізації напору.
Як регульований електропривод насосної установки в системі гарячого водопостачання передбачається використання одного з типів електроприводу, у тому числі: індукторних муфт ковзання (ІМС) з живленням збудження від тиристорних блоків БО-3509 та подібних до них; частотних перетворювачів серії ПЛТ, ПЧР-2 SAMI (фірма Stromberg) та інших типів; електроприводів за схемою АВК на базі перетворювачів ТДП-2 та станцій управління ШДУ; електроприводів на базі вентильних електродвигунів з перетворювачами ПЧВН, ПЧВС.
Стабілізація напору рідини здійснюється за рахунок того, що при зменшенні водорозбору напір у мережі збільшується, а частота обертання електродвигуна насоса внаслідок дії системи регулювання зменшується. При збільшенні водоспоживання, навпаки, тиск рідини в мережі падає, а частота обертання збільшується. Основна мета системи стабілізації тиску рідини в системі трубопроводів полягає в підтримці тиску на заданій відмітці.
У системах стабілізації напорів у мережі необхідно передбачати включення додаткових нерегульованих насосів при суттєвих збільшеннях притоку або водоспоживання та відключення їх при зменшенні.
Регульованим приводом повинні оснащуватися найбільші насосні агрегати з найбільш пологою характеристикою. У разі використання однотипних насосів, щоб уникнути утворення мертвих зон, робочі колеса нерегульованих насосів повинні мати діаметри, менші за регульовані. При рівності діаметрів та роботі регульованого насоса в режимі максимальних подач з підвищеною частотою обертання (у разі застосування частотного електропривода) він має бути укомплектований двигуном підвищеної потужності відповідно до рекомендацій.
Незважаючи на явні переваги, регульований електропривод ще не набув широкого поширення в насосних установках. Нині склалися умови, потребують його ширшого використання. Бурхливий розвиток напівпровідникової техніки дозволило створити на базі статичних перетворювачів надійні та порівняно недорогі регульовані електроприводи. Крім того, світова енергетична криза наочно продемонструвала справжню цінність енергетичних ресурсів та стимулювала заходи щодо їх раціонального витрачання. Внаслідок цього розширилися роботи з дослідження, розробки та створення насосних установок, оснащених автоматизованим регульованим електроприводом.
Системи призначені для автоматичного та ручного керування групою насосних агрегатів з асинхронними електродвигунами, що працюють у системах водопостачання або водовідведення з метою підтримання заданого тиску води у магістралі або рівня у технологічних ємностях.
Можливості систем автоматичного керування насосними станціями:
· Автоматичне, ручне та дистанційне керуваннянасосними агрегатами;
· Збір інформації про стан кожного об'єкта управління;
· Збір інформації про стан параметрів вхідної та вихідної магістралі, рівнів;
· управління запірною та регулюючою арматурою в автоматичному, ручному режимі та дистанційно диспетчером;
· Відображення інформації про стан об'єктів у графічному редакторі на екрані диспетчерського пункту;
· При роботі в автоматичному режимі контроль годинника напрацювання по кожному насосу.
· Станції забезпечують:
· Економію споживаної електроенергії (не нижче 50 ... 65%) та зниження споживання води;
· Обмеження пускових струмів у мережі;
· Збільшення ресурсу електродвигунів насосів;
· Зменшення кількості чергового та ремонтного персоналу.
Використання ежекторів у насосних станціях
Насосні станції для свердловин оснащуються або вбудованими або виносними ежекторами, які з'єднані зі струменево-відцентровим насосом. Ежектор- пристрій, в якому відбувається передача кінетичної енергії від одного середовища, що рухається з більшою швидкістю, до іншого. Ежектор, працюючи по законуБернуллі, створює в звужується переріз знижений тиск одного середовища, що викликає підсмоктування в потік іншого середовища, яка потім переноситься і віддаляється від місця всмоктування енергією першого середовища. Перший варіант має підвищену надійність, при цьому вдається отримати великий напір при достатній для практичного застосування глибині всмоктування. Вбудовані ежектори особливо зручні в свердловинах типу «голка», що є трубою, забитою в землю до водоносного шару. У другому варіанті насосна станція для води використовує самі типи насосів, проте ежектори в них не вбудовані, а виносні, що дозволяє з успіхом піднімати воду зі свердловин, що мають глибину до 50 метрів і більше. Основний агрегат розташовується зовні, а двотрубний ежектор спускається на дно. Найчастіше подібна система водопостачання використовується при значному видаленні свердловини від споживача. Її недолік - критичність до забруднення води та порівняно невисокий ККД.
Про виробників насосних станцій.
Визнаними світовими лідерами, що випускають найкращі за співвідношенням ціни та функціональності промислові та побутові насосні станції, є італійські компанії Marina та Calpeda. До переваг слід віднести:
· Надійність;
· Безшумність у роботі;
· Простоту підключення та використання;
· Достатній модельний ряд;
· завершену комплектацію;
· компактність;
· Простоту і продуманість автоматики;
· Наявність ефективних засобівзахисту;
· Значний моторесурс.
Ціна на насосну станцію залежить від її можливостей. Найбільший попит серед покупців мають такі серії:
· СеріяCAMдля водопостачання із свердловин із глибини до 9 м;
· СеріяAPMдля водопостачання із свердловин із глибини до 25 м;
· Серія Idromatавтоматична система на основі регулятора Idromat
· Серія BS.Бустерні станції, що включають до 6 насосів;
· СеріяMINIMAT, TURBOMAT, CENTRIMATіGETTOMAT. Автоматичні системи із мембранним баком;
· Серія EASYMAT. Компактні установки.
Насосна станція перекачування з регульованим електроприводом на основі ІМС
Доцільність застосування САУ з регульованим електроприводом у насосних станціях, з урахуванням наявного у нас у країні співвідношення цін на обладнання та електроенергію та інших факторів обґрунтована у роботах ВНДІВОДГЕО. Експериментальну перевірку цих припущень було здійснено на Іванівській насосній станції м. Москви. На цій станції два встановлені насосні агрегати з шести були оснащені ІМС, що виготовляються серійно. Номінальні параметри агрегатів: подача 800 м3/год (О,22 м3/с), напір 33 м (О,33), потужність 160 кВт, частота обертання 960 об/хв, крутний момент ІКС 1, 60 кНЧм (160 кгс/м ). Регулювання режиму роботи установки без регульованого електроприводу здійснювалося періодичним включенням-вимкненням: насосних агрегатів. Число включень становило 30-40 на добу, а число працюючих агрегатів залежно від припливу змінювалося від 1 до 6. Система автоматичного регулювання змінює частоту обертання одного або двох регульованих агрегатів і загальна кількість працюючих агрегатів відповідно до зміни припливу. Частота обертання змінюється за сигналом відхилення, що формується при виході рівня із заданих меж. Сигнал відхилення, оброблений за ПІ-законом, надходить на вхід системи імпульсно-фазного управління тиристорного збудника ІМС. Тим самим регулюється її струм збудження та відповідно частота обертання електродвигуна насоса. При суттєвих змінах припливу, коли зміна частоти обертання регульованого насоса не забезпечує необхідної зміни подачі насосної установки, виникає необхідність зміни загальної кількостіпрацюючих на станції агрегатів. Для цього служить блок взаємодії регульованих та нерегульованих агрегатів. Блок відключає спин з нерегульованих агрегатів і форсує збудження ІКС до максимального значення струму (5 А) в той момент часу, коли частота обертання насоса, що регулюється, стає настільки малою, що його зворотний затвор закривається і насос припиняє відкачування. Якщо частота обертання регульованого насоса досягає максимального значення, а приплив продовжує збільшуватися і установка не справляється з відкачуванням стічних вод з резервуара, блок включає додатково один з нерегульованих агрегатів і зменшує збудження ІМС до мінімуму. Система забезпечує стабілізацію рівня в резервуарі насосної станції з точністю 50 мм та короткочасними відхиленнями (до 350 мм) при підключенні або вимкненні нерегульованого насосного агрегату. Система дозволяє регулювати частоту обертання одночасно кількох, у разі двох, агрегатів. Необхідність у такому режимі роботи виникає при незначному перевищенні надходження над подачею одного насоса. У таких умовах паралельна робота регульованого та нерегульованого агрегатів нестійка, тому що навантаження регульованого агрегату складає всього 5-10% номіналу. Незначні зміни припливу, що виникають при цьому, тягнуть за собою включення і відключення нерегульованого агрегату. Внаслідок цього створюються значні впливи, які не завжди можуть бути зняті системою регулювання. Синхронна робота двох регульованих агрегатів, еквівалентна роботі одного агрегату великої потужності, запобігає виникненню нестійких режимів роботи. Впровадження системи регулювання дозволило скоротити споживання електроенергії приблизно 10%, тобто. на 170 000 кВт на рік, а також кількість включень насосних агрегатів з 30 до 3 на добу.
Підвищення ефективності СНУ забезпечується введенням пристрою, що змінює кількість працюючих агрегатів до того, як насосний агрегат, що регулюється, увійде в зону неприпустимо низьких ККД. Такий пристрій розроблено у ВНІІВОДГЕО і пройшов перевірку на одній з московських насосних станцій, що діють. Одночасно досвід експлуатації виявив надзвичайно низьку надійність ІМС, що серійно виготовляються нашою промисловістю, що не дозволяє рекомендувати їх для широкого впровадження до приведення їх у відповідність до кращих зразків ІМС, що виготовляються зарубіжними фірмами. На об'єкті випробовувалися кілька систем регулювання: з дискретними та аналоговими перетворювачами різних типів. В умовах насосних станцій найбільш надійними виявилися аналогові перетворювачі з повітряним дзвоном.
Насосна станція з регульованим електроприводом за схемою АВК
У м. Москва тривалий час працює СНУ Кунцевської насосної станції, на якій встановлено шість насосних агрегатів потужністю 800 кВт, у тому числі 3-4 робітники. Система автоматичного регулювання складається з одного асинхронного електродвигуна з фазним ротором потужністю 800 кВт і частотою обертання 740 об/хв, перетворювача АВК, функції якого виконує агрегат ТДП2ЗО4ОО-Т, що складається з випрямляча та інвертора, що згладжує дроселя ФРОС-800, управління П3ДУ90248А та пускових резисторів, перетворювача рівня, що складається з повітряного дзвону та диференціального манометра; ПІ-регулятор. Система стабілізує рівень рідини в резервуарі з точністю 7-10 см. Вища точність стабілізації рівня спричиняла підвищений знос пальців еластичної муфти, що з'єднує електродвигун з насосом. Підвищений знос обумовлений хвилюванням рідини в резервуарі (висота хвилі по 20 см), що вимагало збільшити зону нечутливості САУ та знизити точність стабілізації рівня. Принцип дії системи регулювання частоти обертання агрегату аналогічний вищеописаній. Зміна числа насосних агрегатів, що працюють на станції, здійснюється оперативним персоналом. Використання цієї системи в насосній установці заощаджує щорічно 600 700 тис. кВт/год електроенергії, таким чином приблизно 4-5 % загального енергоспоживання.
Додаткові капітальні витрати, зумовлені застосуванням системи регулювання насосної установці, склали 15 тис. руб. Регульований насосний агрегат використовується протягом року до 5000 год.
В даний час з метою підвищення ефективності роботи САУ та зниження зносу регульованого насосного агрегату намічено оснащення ще одного насоса регульованим електроприводом того ж типу.
Насосні станції із частотними електроприводами
У насосній станції Мосвокбуд (м. Москва) звичайний короткозамкнутий асинхронний електродвигун насоса потужністю 110 кВт/год включений через перетворювач ПШТ, розроблений НДІ ХЕМЗ. Система управління електроприводом побудована аналогічно раніше описаним, за винятком того, що як перетворювач рівня в системі використаний ультразвуковий рівнемір ВІДЛУННЯ3. Застосування частотного електроприводу у цій установці зменшує споживання електроенергії на 60 тис. кВт - год на рік, т.ч. приблизно 5%.
У насосних станціях м. Москва використовуються також частотні перетворювачі типу ПЧР-2 та виробництва фінської фірми Stromberg, на основі яких створено та працюють понад 10 систем автоматичного регулювання режиму роботи насосних станцій з агрегатами потужністю від 75 до 160 кВт. Система регулювання із застосуванням частотного перетворювача типу SAMI фірми Stromberg тривалий час експлуатується на Ново-Нагатинській станції, забезпечуючи економію електроенергії 7-8% від загального її споживання.
Частотні перетворювачі фірми Stromberg – високонадійні та досить компактні засоби регулювання насосних агрегатів. Для забезпечення рівномірного використання насосних агрегатів передбачається пристрій, за допомогою якого вони можуть послідовно підключатися до одного перетворювача.
Відомі випадки застосування вітчизняних частотних перетворювачів типу ПШТ у м. Харкові, типу ЕКТ – у м. Ленінграді та ін.
Насосна станція з приводом на базі вентильного електродвигуна
насосний станція електропривод
На Філевській насосній станції м. Москва впроваджено САУ з використанням електроприводу на базі вентильного електродвигуна. З шести насосів марки 30-ФВ-17, встановлених на станції, один з них оснащений таким електроприводом із застосуванням перетворювача ПЧВН, розробленого НДІ ХЕМЗ. Потужність електроприводу 1600 квт, напруга двигуна 10 кВ. Перетворювач підключений до живильної електромережі через сухий понижувальний трансформатор потужністю 4000 кВЧА, а двигун - до перетворювача через такий же підвищує трансформатор. До складу перетворювача входить тиристорний перетворювач живлення системи збудження синхронного електродвигуна, який при впровадженні електроприводу не замінювався. Система керування електроприводом насоса аналогічна вищеописаним. Як датчик рівня використаний повітряний дзвінта дифманометр з виходом 0-5 мА. У системі керування використаний ПІ-регулятор типу Р-17. Застосування САУ з регульованим електроприводом знизило споживання електроенергії приблизно на 1200 тис. кВт-год, покращило умови експлуатації насосного обладнання, полегшило умови роботи оперативного персоналу. Аналіз роботи САУ та виконані розрахунки показують, що обладнання аналогічним електроприводом другого насосного агрегату дозволяло б збільшити економію електроенергії майже вдвічі. На станції пройшов перевірку пристрій, що виключає роботу насоса, що регулюється, в зоні низьких ККД.
Розміщено на Allbest.ru
...Подібні документи
Використання насосних станцій для перекачування виробничих стічних вод, їх проектування стоять окремо або в блоці з виробничими приміщеннями. Добір допоміжного обладнання. Техніко-економічні розрахунки, техніка безпеки.
курсова робота , доданий 01.09.2014
Вихідні дані щодо технологічного розрахунку нафтопроводу. Механічні характеристики трубних сталей Технологічний розрахунок нафтопроводу. Характеристика трубопроводу без лупінгу та насосних станцій. Розставляє насосні станції на профілі траси.
курсова робота , доданий 04.03.2014
Розробка системи управління насосною станцією, побудованої з урахуванням частотного перетворювача. Розрахунок електродвигуна та його механічних характеристик. Вибір частоти перетворювача. Економічний ефект та термін окупності запропонованого рішення.
дипломна робота , доданий 08.01.2012
Насосні та повітродувні станції як основні енергетичні ланки систем водопостачання та водовідведення. Розрахунок режиму роботи насосної станції. Вибір марки господарсько-побутових насосів. Компонування насосної станції, вибір додаткового обладнання.
курсова робота , доданий 16.12.2012
Основне цільове призначення меліоративної станції, її проектування. Особливості зрошувальних насосних станцій. Дані, покладені основою проекту. Конструктивний опис вузла споруди. Вибір гідромеханічного, енергетичного обладнання.
контрольна робота , доданий 30.11.2012
Етапи розвитку та експлуатації нафтового родовища. Збирання та транспортування продукції свердловин на Ловенському родовищі. Призначення дожимних насосних станцій, важлива технологічна схема. Принцип дії секційного відцентрового насосу.
курсова робота , доданий 27.03.2016
Проектування магістральних газонафтопроводів, вибір траси магістрального трубопроводу. Технологічні схеми компресорних станцій із відцентровими неповнонапірними нагнітачами. Спільна робота насосних станцій та лінійної частини нафтопроводу.
курсова робота , доданий 17.05.2016
Характеристика конструкцій нафтоперекачувальних станцій та компенсаторів. Основні причини відмови обладнання пов'язані з вібрацією. Розробка заходів щодо зниження вібрації введенням в обв'язування насоса універсальних сильфонних лінзових компенсаторів.
дипломна робота , доданий 16.05.2017
Аналіз застосування штангових насосних свердловинних установок (ШСНУ) в сучасних умовах. Схема влаштування ШСНУ, розрахунок, підбір обладнання. Свердловинні штангові насоси, їх призначення та сфера застосування, що рекомендується. Характеристика роботи насосних штанг.
контрольна робота , доданий 19.01.2016
Класифікація газорозподільних станцій (ГРС). Принцип роботи ГРС індивідуального проектування. Технологічна схема блочно-комплектної ГРС марки БК-ГРС-I-30 та автоматичної ГРС марки АГРС-10. Типове обладнання газорозподільної станції.


